Эдуард Металович Нейматов, Сергей Львович Сабинин «НАСТОЛЬНАЯ КНИГА ОСТЕОПАТА» Основы биомеханики движения тела
Рецензент: Муслов Сергей Александрович, канд. физ. — мат. наук, доктор биол. наук, доцент кафедры медицинской и биологической физики МГМСУ.Авторы: Нейматов Эдуард Металович, профессор кафедры нелекарственных методов лечения и клинической физиологии Первого МГМУ им. И.М. Сеченова, врач-невролог, доктор остеопатии, доктор медицинских наук; Сабинин Сергей Львович, доктор остеопатии, врач-невропатолог, заведующий циклом структуральной остеопатии РВШОМ. Авторы выражают большую благодарность тем, кто принял участие в создании этого труда. Особую благодарность — друзьям и коллегам за привнесенный вклад и ценные замечания: Голубевой Любови Юрьевне, врачу-неврологу, рефлексотерапевту, мануальному терапевту, доктору остеопатии, преподавателю Института остеопатии СПбГУ; Крестиной Людмиле Сергеевне, врачу-ортопеду, травматологу-хирургу, доктору остеопатии, преподавателю кафедры восстановительной медицины МГУ им. Ярослава Мудрого.
Список сокращений
АД — амплитуда давления АДФ — аденозиндифосфат АТФ — аденозинтрифосфат Б.Св — бедро — связка ББК-БК — большая берцовая кость — бедренная кость БК-ББК — бедренная кость — большая берцовая кость ВГ — веревка — груз ВДППС — вальгусная деформация первого пальца стопы ВМ — внутренняя мышца ВН — веревка — нога ВСРО — вектор силы реакции опоры ВЧ — весы — человек ГА — гиалуронон ГАГ — гликозаминогликаны ГВ — груз — веревка ГК — гиря — кисть ГРТ — голова, руки, туловище ГСП — глубокий сгибатель пальцев ГСР — глубокий сухожильный рефлекс ГТ — гравитация тела ГЧ — гравитация — человек ДД — Дом друзей ДМС — дистальный межфаланговый сустав ДРП — длинный разгибатель пальцев ДС — деформация сжатия ЗВГПК — задний верхний гребень подвздошной кости ЗДМ — задняя часть дельтовидной мышцы Кгир — кисть — гиря КГМ — ключичная грудинная мышца КГЧ — ключичная грудинная часть КК — клин — качели КЛРЗ — короткий лучевой разгибатель запястья КМ — комбаловидная мышца КС — книга на стол КС — компонент смещения КТ — кожа — таз Лв. — левая ЛГ — линия гравитации ЛМ — латеральная мышца ЛОГ — линия силы тяжести ЛРЗ — локтевой разгибатель запястья ЛСТ — линия силы тяжести ЛТ — линия тяжести МВР — мышечно-веретенный рефлекс МК — мышца — кость МОВ — мгновенная ось вращения МФС — межфаланговый сустав Н.Св — нога — связка НВ — нога — веревка НП — правая нога — пол НПД — непрерывное пассивное движение НС — напряжение смещения ОБМ — отсроченная боль в мышце ОСм — общая сила мышц ОЦТ — общий центр тяжести тела ПБМ — передняя большеберцовая мышца ПВ — прием веса ПВГПК — передний верхний гребень подвздошной кости ПГ — протеогликаны ПДМ — передняя часть дельтовидной мышцы ПК — сила портфеля на кисть ПКС — передняя крестообразная связка ПМ — плечо момента ПМ — промежуточная мышца ПМС — проксимальный сустав ПН — пол — правая нога ПО — площадь опоры ПР — плечо рычага Пр. — правая ПРВ — продолжение вперед ПРК — сила предплечья на кисть ПРС — пронос стопы ПС — пол — стол ПС — плечо сопротивления ПСП — поверхностный сгибатель пальцев ПСС — постановка стопы ПУ — плечо усилия ПФС — плюснефаланговый сустав ПЯ — пол — ящик РК — рука — книга РП — разгибатель пальцев РСТ — ротационная сила тяжести СВК — связки колена Св. Н — связка колена — нога СГП — стабилизация головы в пространстве СДМ — средняя часть дельтовидной мышцы СИМ — средняя часть икроножной мышцы СК — сила тяжести — кожа СК — стол — книга СКТ — суставные коэффициенты трения СР — сила руки СРО — сила реакции опоры СС — сила сдвига СТ — сила тяжести — человек СТ — сила тяжести СТК — сила тяжести — качели CTK — сила тяжести на кисть СТН — сила тяжести ноги СТСШ — сила тяжести соприкосновения шара СТЧ — сила тяжести человека СШ — соприкосновение шара ТB — тяга вверх ТК — сила тяжести — книга ТК — таз — кожа ТС — сила тяжести — стол ТСК — тяга связки колена У — усилие УП — усилие плеча ФНМС — функциональная нервно-мышечная стимуляция ФППС — физиологическая площадь поперечного сечения ЦД — центр давления ЦК — центр кисти ЦНС — центральная нервная система ЦО — центр объема ЦОГ — центральная ось гравитации ЦП — центр поверхности ЦП — центр предплечья ЦПл — центр плеча ЦПлПК — центр тяжести плеча/предплечья/кисти ЦТ — центр стола ЦТ — центр тяжести ЦТС — центр тяжести стола ЧАБ — человек А-блок ЧББ — человек Б-блок ЧВ — человек — весы ЧКМ — чистый концентрический момент ЧЯ — человек — ящик ШП — шар — предплечье ЭМГ — электромиография ЯМР — ядерный магнитный резонанс F — сила
Предисловие
Биомеханика как механика биологических систем имеет дело с весьма сложным объектом исследования с исключительно многообразными межпредметными связями. Этим объясняются трудности систематизации и классификации исследований, а также определения сфер применения «чистой» механики при исследовании живых тканей и биологических конструкций из них. Предлагаемая вниманию читателя монография доктора остеопатии, врача-невролога, доктора медицинских наук профессора Э.М. Нейматова и врача-невропатолога, заведующего циклом структуральной остеопатии Русской высшей остеопатической школы С.Л. Сабинина представляет собой обзор различных аспектов биомеханики — достаточно нового научного направления, развивающегося в последние 40–45 лет на границе между механикой, биологией и медициной. Э.М. Нейматов начал свои исследования в области биомеханики в 1992 г. Сегодня он ведет интересные теоретические и экспериментальные исследования на кафедре нелекарственных методов лечения и клинической физиологии Первого МГМУ им. И.М. Сеченова по различным направлениям биомеханики тела человека и функциям его суставной и мышечной структуры. Раздел I книги посвящен основным понятиям биомеханики. Автор дает определение важнейшим биомеханическим характеристикам и описывает основные физические законы, управляющие покоем и движением тела человека. Значительное внимание уделено типам движения, анализу сил, различным рычагам в человеческом организме и их системам, центру тяжести, условиям устойчивости и подвижности частей тела и т. д. В разделе II представлены основные характеристики постуральной ориентации, статической и динамической осанки. Обсуждаются оптимальная осанка и возможные причины и последствия ее нарушения. Даны основные элементы постурального контроля. Раздел III — это анализ биомеханики ходьбы и бега, кинематика и кинетика туловища и конечностей, отклонений от нормы при ходьбе. В разделе IV подробно рассмотрены принципы построения, архитектура и свойства суставов человека. Дана их классификация. В качестве специфических структур анализируются связки, сухожилия, сумки, хрящи, костная ткань. Описаны материалы, используемые в суставах человека. С позиций реологии обсуждается такое фундаментальное свойство соединительной ткани, как вязкоупругость — сочетание вязких и упругих свойств. Помимо упругости анализируются такие важные механические характеристики живых «строительных» материалов, как пластичность и прочность. Рассматриваются также механические свойства биологических тканей при постоянных и циклических нагрузках, диаграмма напряжение-деформация, с клинической точки зрения — последствия заболеваний, иммобилизации и перегрузки суставных структур. Раздел V посвящен структуре и функции мышц. В этой части книги подробно представлены основные элементы мышечной структуры и их взаимосвязь с мышечной функцией. Рассмотрены состав мышечного волокна, типы волокон их организация. Дано введение в классификацию мышц и факторов, влияющих на мышечную функцию. Рассматривая расположение различных мышечных прикреплений, авторы достаточно подробно обсуждают, как мышцы создают движение в суставах, а также обеспечивают их стабильность. Все разделы заканчиваются резюме и контрольными вопросами. Список библиографических названий, приведенный в книге, достаточно обширный. Весьма широко представлены как отечественные, так и зарубежные литературные источники. В целом книга Э.М. Нейматова и С.Л. Сабинина представляет несомненный интерес для читателей и сумеет еще больше привлечь внимание механиков и медиков к решению новых актуальных и практически важных проблем биомеханики. Муслов Сергей Александрович, канд. физ. — мат. наук, доктор биол. наук, доцент кафедры медицинской и биологической физики МГМСУI. ОСНОВНЫЕ ПОНЯТИЯ БИОМЕХАНИКИ
Задачи
После изучения этой части читатель должен уметь давать определения по терминологии, используемой в биомеханике. Описывать 1. Четыре типа движений. 2. Плоскость, в которой происходит движение данного сустава и оси, вокруг которых выполняется движение. 3. Местоположение центра тяжести жесткого объекта, местоположение центра тяжести сегментированного объекта, расположение центра тяжести в человеческом теле. 4. Линию действия одиночной мышцы. 5. Наименование, точку приложения, направление и величину любой силы взаимодействия и силы реакции. 6. Линейную систему сил, систему пересекающихся сил, систему параллельных сил. 7. Связь между поступательным движением, моментом плеча рычага и ротационным компонентом силы. 8. Два метода определения поступательного движения для одного и того же набора сил. 9. Как анатомический блок изменяет линии мышечного действия, моменты рычага и поступательно-ротационный момент мышц. 10. Где будет находиться точка приложения с направленным вектором силы, в которой действует мышца на сустав максимально эффективно с точки зрения биомеханики. 11. Как можно манипулировать внешними силами для максимального увеличения движения в ротации. 12. Смещение по отношению друг к другу двух контактных поверхностей с оценкой направленной силой воздействия.Определять 1. Особенности и названия сил, обозначенных графически. 2. Новый центр тяжести объекта при изменении организации сегментов, с учетом исходного центра тяжести. 3. Результирующий вектор в линейной системе сил, системе пересекающихся сил и системе параллельных сил. 4. Находится ли данный объект (часть тела) в линейном и ротационном равновесии. 5. Величину и направление ускорения объекта, не находящегося в равновесии. 6. Какие силы вызывают расхождение сустава, а какие являются компрессионными. Какие силы являются силами равновесия для каждого сустава. 7. Величину и направление вектора трения для данной задачи. 8. Класс рычага для данной задачи.
Сравнивать 1. Механические преимущества рычагов второго и третьего рода. 2. Работу, выполненную мышцами в рычагах второго и третьего рода. 3. Устойчивость объекта в двух заданных ситуациях, когда меняется положение центра тяжести и площадь опоры.
Изображать 1. Линию направления действия мышцы. 2. Ротационный компонент силы, момент силы поступательного движения и момент плеча для данной силы действующего рычага.
Введение
Задачей этой книги является исследование биомеханики человеческого тела — сложнейшего механизма со следующей целью: понять, как суставная структура и мышечная функция отвечают сопутствующим и, одновременно, противоречивым потребностям организма в подвижности и стабильности. Знание физических принципов, которые управляют телом и сил, действующих на него, является предпосылкой к исследованию структуры и функции отдельных его частей. Это знание приобретается через изучение механики. Наука о механике человеческого тела называется биомеханикой и состоит из двух основных областей: кинематики и кинетики. Кинематика — это область биомеханики, включающая в себя описание движения без учета сил, вызывающих это движение. Кинетика — это область биомеханики, относящаяся к силам, вызывающим движение, или сохраняющим равновесие. Основным содержанием данной части является биомеханика, относящаяся к жестким объектам, т. е. тело мы будем рассматривать так, будто оно сделано из твердых костных рычагов. В общем, ни кости, ни структуры, к ним прикрепляющиеся, не являются ни жесткими, ни твердыми. Скорее ткани, которые составляют эти структуры, внутренне реагируют на воздействующие на них силы, в соответствии с особенностями собственного тканевого состава. Внутренние реакции сил, характеристика материалов или характеристики тканей, из которых построено тело, рассматриваются в IV части книги.Биомеханика как наука о движениях человека
Общие понятия Биомеханика — наука о законах механического движения в живых системах. В самом широком смысле к живым системам (биосистемам) относят: • целостные организмы (например, человек); • их органы и ткани, а также жидкости и газы в них (внутриорганизменные системы); • объединения организмов (например, совместно действующая пара акробатов, противодействующие борцы). Биомеханика спорта как учебная дисциплина изучает движения человека в процессе физических упражнений. Она рассматривает двигательные действия «спортсмена» как системы взаимно связанных активных движений (объект познания). При этом исследуют механические и биологические причины движений и зависящие от них особенности двигательных действий в различных условиях. Для лучшего понимания сути и роли механического движения человека рассмотрим основные понятия о движении в общем и о движениях организма (например, человека) в частности. Механическое движение в живых системах проявляется как: а) передвижение всей биосистемы относительно ее окружения (среды, опоры, физических тел) и б) деформация самой биосистемы — передвижение одних ее частей относительно других. Основные законы механики Ньютона описывают движение абстрактных абсолютно твердых тел, которые не деформируются. Таких тел в природе не существует. Но в так называемых твердых телах деформации бывают столь малы, что их нередко можно и не учитывать. В живых же системах существенно изменяется относительное расположение их частей. Эти изменения и есть движения человека. Сами части живых систем (например, позвоночный столб, грудная клетка) также подчас существенно деформируются. Поэтому, изучая движение живой системы, имеют в виду, что работа сил тратится и на передвижение тела в целом, и на деформации. При этом всегда имеются потери энергии, ее рассеяние. Чисто механического движения вообще в природе не существует. Оно всегда сопровождается превращениями механической энергии в другие виды (например, в тепловую) и его потерями. Механическое движение человека, изучаемое в биомеханике спорта, происходит под воздействием внешних механических сил (тяжести, трения и многих других) и сил тяги мышц, управляемые центральной нервной системой и, следовательно, обусловлены физиологическими процессами. Поэтому для достаточно полного понимания природы живого движения необходимо не только изучение собственно механики движений, но и рассмотрение их биологической стороны. Именно она определяет причины организации механических сил. Надо знать, что не существует особых законов механики для живого мира. Но насколько живые системы отличаются от абстрактных абсолютно твердых тел, настолько же механическое движение живого сложнее движения абсолютно твердого тела. Следовательно, применяя общие законы механики к живым объектам, необходимо учитывать не только их механические особенности, но и биологические (например, причины приспособления движений человека к условиям, пути совершенствования движений, влияние утомления). Двигательная деятельность человека — одно из сложнейших явлений в мире. Она сложна не только потому, что очень непросты функции органов движения, а еще и потому, что в ней участвует сознание как продукт наиболее высокоорганизованной материи — мозга. Поэтому двигательная деятельность человека существенно отличается от деятельности животных. В первую очередь речь идет об осознанной целенаправленной активности человека, о понимании смысла ее, о возможности контролировать и планомерно совершенствовать свои движения. Сходство между движениями животных и человека имеется только на чисто биологическом уровне. При помощи двигательной деятельности человек в процессе физического воспитания активно преобразует свою собственную природу, физически совершенствуется. Он преобразует мир, используя возможности научно-технического прогресса, в конечном счете, также посредством двигательной деятельности (действия, речь, письмо и т. п.). Двигательная деятельность человека складывается из его действий. Двигательные действия осуществляются при помощи произвольных активных движений, вызванных и управляемых работой мышц. Человек произвольно, по собственной воле, начинает движения, изменяет их и прекращает, когда цель достигнута (И.М. Сеченов). «В норме человек производит не просто движения, а всегда действия», — утверждал создатель отечественной школы биомеханики Н.А. Бернштейн. Действия человека всегда имеют цель, определенный смысл. Еще Ньютон поставил вопрос: «Каким образом движения тел следуют воле?», т. е. достигают поставленной цели. Но только в наше время начинают разрабатывать механику целенаправленных (произвольных) движений человека, исходя из цели движений. Движения отдельных частей тела объединены в управляемые системы движений, целостные двигательные акты (например, гимнастические упражнения, способы передвижения на лыжах, приемы игры в баскетбол). В системы движений входит также и активное сохранение положений отдельных частей тела (в суставах), а иногда и всего тела. Каждое движение выполняет свою роль в целостном действии, так или иначе соответствует цели действия. Если спортсмен будет находить и осуществлять цель в каждом движении, то и действия будут лучше приводить к ней. Хотя причины движений в биомеханике и рассматриваются с точки зрения механики и биологии, их закономерности надо брать во взаимосвязи, учитывая роль человеческого сознания в целенаправленном управлении движениями. Именно взаимосвязь механических и биологических закономерностей позволяет раскрыть специфику биомеханики. Сознательное управление движениями с использованием этой специфики обеспечивает их высокую эффективность в различных условиях исполнения.
1. Биомеханические характеристики
Наблюдая движения человека, можно заметить, что многие их особенности все время изменяются. Изменяется положение звеньев тела, скорости движения и многое другое. Особенности (или признаки) движения позволяют разделить сложное движение на составные части, заметить, как они влияют одна на другую, как помогают достичь цели. Для этого и изучают характеристики движений человека. Характеристики движений человека — это те особенности, или признаки, по которым движения различаются между собой. Различают качественные и количественные характеристики. Качественные характеристики — характеристики, описываемые только словами и не имеющие точной количественной меры (например: напряженно, свободно, плавно, мягко и др.). Количественные характеристики — характеристики, которые измеряют или вычисляют, они имеют количественную меру. Педагогу при проведении урока нечем и некогда измерять и регистрировать количественные характеристики. Ему приходится пользоваться качественными характеристиками, он проводит качественный биомеханический анализ движений каждого ученика. Изучая движения с помощью измерительной и записывающей аппаратуры, получают количественные характеристики. Их обрабатывают, проводят вычисления для количественного биомеханического анализа. Конечно, затем должен следовать и качественный анализ, чтобы понять законы движения и использовать их в физическом воспитании. Хорошо владея навыками количественного анализа, в повседневной практической работе можно с успехом пользоваться только качественным анализом. Кинематические и динамические характеристики относятся к количественным характеристикам. При этом следует отметить тот факт, что движения человека и предметов, перемещаемых им, можно заметить и измерить, только сравнивая их положения с положением выбранного для сравнения тела (тело отсчета), поэтому все движения человека в биомеханике рассматриваются как относительные. Движение выражается в изменении с течением времени взаимного положения тел. Его можно наблюдать и отсчитывать только относительно других реальных тел (например, при прыжках в длину — относительно бруска) или условных (например, в старте яхт — относительно линии створа). В зависимости от условий задачи, стоящей при изучении двигательного действия, выбирается та или иная система отсчета. Принято выделять: • инерциальную систему отсчета (земля, дорожка, лыжня) — движения их в данной системе незаметны при измерениях, т. е. изменениями скорости, ускорениями при решении данной задачи можно пренебречь; • неинерциальная система отсчета — движущееся тело (скользящая лыжа, раскачивающиеся кольца), движение которого происходит с заметным ускорением, существенно влияющим на отсчет расстояния; • соматическая система отсчета (тело человека) — движение звеньев рассматривается относительно туловища.
2. Кинематические характеристики
Наблюдая сам факт движений, их внешнюю картину, различают пространственную форму (рисунок, узор) движений и их характер (изменение во времени — быстрее, чаще и т. п.). Количественные характеристики, раскрывающие форму и характер движений, называются кинематическими. Они описывают движения в пространстве и во времени. Соответственно различают характеристики: • пространственные; • временные; • пространственно-временные. Пространственные характеристики позволяют определить, каково исходное и конечное положения при движении (координата), какова между ними разница, насколько они изменились (перемещение) и через какие промежуточные положения выполнялось движение (траектория), т. е. пространственные характеристики в целом определяют пространственную форму движений человека. Координата точки — это пространственная мера местоположения точки относительно системы отсчета. С точки зрения механики описать движение — это значит определить положение в любой момент времени, определить координаты опознавательных точек тела, по которым изучают ход движения в пространстве. По координатам определяют, где находится изучаемая точка относительно начала отсчета, измеряя ее линейные координаты. Положение точки на линии определяет одна координата, на плоскости — две, в пространстве — три. Изучая движение, нужно определить: 1) начальное положение, из которого движение начинается; 2) конечное положение, в котором движение заканчивается; 3) ряд мгновенных промежуточных положений, которые принимает тело при выполнении движения. Перемещение точки — это пространственная мера изменения местоположения точки в данной системе отсчета. Перемещение — величина векторная. Она характеризуется численным значением (модулем) и направлением, т. е. определяет размах и направление движения. Если после движения точка вернулась в исходное положение, перемещение равно нулю. Таким образом, перемещение есть не само движение, а лишь его окончательный результат — расстояние по прямой и направление от исходного до конечного положения. Перемещение (линейное, в поступательном движении) измеряется разностью координат в моменты начала и окончания движения. Перемещение тела при вращательном движении измеряется углом поворота — разностью угловых координат в одной и той же системе отсчета расстояний. Траектория точки — это пространственная мера движения (воображаемый след движения точки). Траекторию определяют, устанавливая ее длину, кривизну и ориентацию в пространстве. Пространственный рисунок движения точки дает ее траектория. Длина траектории показывает, каков путь точки. Путь точки в прямолинейном движении равен расстоянию от исходного до конечного положения. При криволинейном движении путь точки равен арифметической сумме модулей ее элементарных перемещений. Кривизна траектории показывает, какова форма движения в пространстве. Чтобы определить кривизну траектории, измеряют радиус кривизны. Если траектория является дугой окружности, радиус кривизны постоянный. С увеличением кривизны ее радиус уменьшается, и, наоборот, с уменьшением кривизны, радиус увеличивается. Ориентация траектории в пространстве при одной и той же ее форме может быть разная. Ориентацию определяют для прямолинейной траектории по координатам точек начального и конечного положений; для криволинейной траектории — по координатам этих двух точек и третьей точки, не лежащей с ними на одной прямой линии. В совокупности ориентация, длина и кривизна траектории позволяют определить направление, размах и форму движения точки, а также начальное, конечное и все промежуточные положения. Временные характеристики раскрывают движения во времени: когда оно началось и закончилось (момент времени), как долго длилось (длительность движения), как часто выполнялось движение (темп), как движения были построены во времени (ритм). Вместе с пространственно-временными характеристиками они определяют характер движений человека. Момент времени — это временная мера положения точки тела и системы, определяемая промежутком времени до него от начала отсчета. Момент времени определяют не только для начала и окончания движения, но и для других важных мгновенных положений. В первую очередь это моменты существенного изменения движения: заканчивается одна часть (фаза) движения и начинается следующая (например: отрыв стопы от опоры в беге — это момент окончания фазы отталкивания и начало фазы полета). По моментам времени определяют длительность движения. Длительность движения — это его временная мера, которая измеряется разностью моментов времени окончания и начала движения. Длительность движения представляет собой количество времени, прошедшее между двумя ограничивающими его моментами времени. Сами моменты (как границы между двумя смежными промежутками времени) длительности не имеют. Ясно, что, измеряя длительность, пользуются одной и той же системой отсчета времени. Узнав путь точки и длительность ее движения, можно определить ее скорость. Зная длительность движений, определяют также их темп и ритм. Темп движений — это временная мера повторности движений. Он измеряется количеством движений, повторяющихся в единицу времени. Темп — величина, обратная длительности движений. Чем больше длительность каждого движения, тем меньше темп, и наоборот. В циклических движениях темп может служить показателем совершенства техники. Ритм движений — это временная мера соотношения частей движений. Он определяется по соотношению промежутков времени, затраченного на соответствующие части движения. Ритм определяют как соотношение двух периодов времени (например: опоры и полета в беге) или длительности двух фаз периода (например: фазы амортизации и фазы отталкивания в опорном периоде). Можно говорить и о ритме ряда фаз (например: соотношение длительностей пяти фаз скользящего шага в лыжном ходе). Ритм бывает постоянным и переменным. Пространственно-временные характеристики определяют, как изменяются положения и движения человека во времени. Скорость точки — это пространственно-временная мера движения. Она определяет быстроту изменения положения точки в пространстве с изменением времени. В поступательном движении скорость измеряется отношением пройденного пути (с учетом его направления) к затраченному времени; во вращательном движении — отношением угла поворота ко времени, за которое произошло вращение. Ускорение точки — это пространственно-временная мера изменения движения, которая характеризует быстроту изменения скорости по величине и направлению. Ускорение измеряется отношением изменения скорости (угловой скорости) к затраченному на него времени. Различают ускорения точки: а) положительное, имеющее одинаковое направление со скоростью, — скорость возрастает; б) отрицательное, имеющее направление, противоположное направлению скорости, — скорость убывает; в) нормальная — скорость прежняя, изменяется направление.
3. Динамические характеристики
Все движения человека и движимых им тел под действием сил изменяются по величине и направлению скорости. Чтобы раскрыть механизм движений (причины их возникновения и ход их изменения), исследуют динамические характеристики. К ним относятся инерционные характеристики (особенности самих движущихся тел), силовые (особенности взаимодействия тел) и энергетические (состояния и изменения работоспособности, биомеханических систем). Инерционные характеристики раскрывают, каковы особенности тела человека и движимых им тел в их взаимодействиях. От инерционных характеристик зависит сохранение и изменение скорости. Все физические тела обладают свойством инертности (или инерции), которое проявляется в сохранении движения, а также в особенностях изменения его под действием сил. Понятие инерции раскрывается в первом законе Ньютона: «Всякое тело сохраняет свое состояние покоя или равномерного и прямолинейного движения до тех пор, пока внешние приложенные силы не заставят его изменить это состояние». Говоря проще: тело сохраняет свою скорость, а также под действием внешних сил изменяет ее. Масса — это мера инертности тела при поступательном движении. Она измеряется отношением величины приложенной силы к вызываемому ею ускорению. Масса тела характеризует, как именно приложенная сила может изменить движение тела. Одна и та же сила вызовет большее ускорение у тела с меньшей массой, чем у тела с большей массой. Момент инерции — это мера инертности тела при вращательном движении. Момент инерции тела относительно оси равен сумме произведений масс всех его частиц на квадраты их расстояний от данной оси вращения. Отсюда видно, что момент инерции тела больше, когда его частицы дальше от оси вращения, а значит угловое ускорение тела под действием того же момента силы меньше; если частицы ближе к оси, то угловое ускорение больше, а момент инерции меньше. Значит, если приблизить тело к оси, то легче вызвать угловое ускорение, легче разогнать тело во вращении, легче и остановить его. Этим пользуются при движении вокруг оси. Силовые характеристики. Известно, что движение тела может происходить как под действием приложенной к нему движущей силы, так и без движущей силы (по инерции), когда приложена только тормозящая сила. Движущие силы приложены не всегда; без тормозящих же сил движения не бывает. Изменение движений происходит под действием сил. Сила не причина движения, а причина изменения движения; силовые характеристики раскрывают связь действия силы с изменением движения. Сила — это мера механического воздействия одного тела на другое в данный момент времени. Численно она определяется произведением массы тела и его ускорения, вызванного данной силой. Чаще всего говорят про силу и результат ее действия, но это применимо только к простейшему поступательному движению тела. В движениях человека как системы тел, где все движения частей тела вращательные, изменение вращательного движения зависит не от силы, а от момента силы. Момент силы — это мера вращающего действия силы на тело. Он определяется произведением силы на ее плечо. Момент силы обычно считают положительным, когда сила вызывает поворот тела против часовой стрелки, и отрицательным при повороте по часовой стрелке. Чтобы сила могла проявить свое вращающее действие, она должна иметь плечо. Иначе говоря, она не должна проходить через ось вращения. Определение силы или момента силы, если известна масса или момент инерции, позволяет узнать только ускорение, т. е. как быстро изменяется скорость. Надо еще узнать, насколько именно изменится скорость. Для этого должно быть известно, как долго была приложена сила. Иначе говоря, следует определить импульс силы (или ее момента). Импульс силы — это мера воздействия силы на тело за данный промежуток времени (в поступательном движении). Он равен произведению силы и продолжительности ее действия. Любая сила, приложенная даже в малые доли секунды (например, удар по мячу), имеет импульс. Именно импульс силы определяет изменение скорости, силой же обусловлено только ускорение. Во вращательном движении момент силы, действуя в течение определенного времени, создает импульс момента силы. Импульс момента силы — это мера воздействия момента силы относительно данной оси за данный промежуток времени во вращательном движении. Вследствие импульса как силы, так и момента силы возникают изменения движения, зависящие от инерционных свойств тела и проявляющиеся в изменении скорости (количество движения, кинетический момент). Количество движения — это мера поступательного движения тела, характеризующая его способность передаваться другому телу в виде механического движения. Количество движения тела измеряется произведением массы тела на его скорость. Кинетический момент (момент количества движения) — это мера вращательного движения тела, характеризующая его способность передаваться другому телу в виде механического движения. Кинетический момент равен произведению момента инерции относительно оси вращения на угловую скорость тела. Соответствующее изменение количества движения происходит под действием импульса силы, а под действием импульса момента силы происходит определенное изменение кинетического момента (момента количества движения). Таким образом, к ранее рассмотренным кинематическим мерам изменения движения (скорости и ускорению) добавляются динамические меры изменения движения (количество движения и кинетический момент). Совместно с мерами действия сил они отражают взаимосвязь сил и движения. Изучение их помогает понять физические основы двигательных действий человека. Энергетические характеристики. При движениях человека силы, приложенные к его телу на некотором пути, совершают работу и изменяют положение и скорость звеньев тела, что изменяет его энергию. Работа характеризует процесс, при котором меняется энергия системы. Энергия же характеризует состояние системы, изменяющейся вследствие работы. Энергетические характеристики показывают, как меняются виды энергии при движениях, и протекает сам процесс изменения энергии. Работа силы — это мера действия силы на тело при некотором его перемещении под действием этой силы. Она равна произведению модуля силы и перемещения точки приложения силы. Если сила направлена в сторону движения (или под острым углом к этому направлению), то она совершает положительную работу, увеличивая энергию движения тела. Когда же сила направлена навстречу движению (или под тупым углом к его направлению), то работа силы отрицательная и энергия движения тела уменьшается. Работа момента силы — это мера воздействия момента силы на тело на данном пути (во вращательном движении). Она равна произведению модуля момента силы и угла поворота. Понятие работы представляет собой меру внешних воздействий, приложенных к телу на определенном пути, вызывающих изменения механического состояния тела. Энергия — это запас работоспособности системы. Механическая энергия определяется скоростями движений тел в системе и их взаимным расположением; значит, это энергия перемещения и взаимодействия. Кинетическая энергия тела — это энергия его механического движения, определяющая возможность совершить работу. При поступательном движении она измеряется половиной произведения массы тела на квадрат его скорости, при вращательном движении половиной произведения момента инерции на квадрат его угловой скорости. Потенциальная энергия тела — это энергия его положения, обусловленная взаимным относительным расположением тел или частей одного и того же тела и характером их взаимодействия. Потенциальная энергия в поле сил тяжести определяется произведением силы тяжести на разность уровней начального и конечного положения над землей (относительно которого определяется энергия). Энергия как мера движения материи переходит из одного вида в другой. Так, химическая энергия в мышцах превращается в механическую (внутреннюю потенциальную упруго деформированных мышц). Порожденная последней сила тяги мышц совершает работу и преобразует потенциальную энергию в кинетическую, энергию движущихся звеньев тела и внешних тел. Механическая энергия внешних тел (кинетическая), передаваясь при их действии на тело человека его звеньям, преобразуется в потенциальную энергию растягиваемых мышц-антагонистов и в рассеивающуюся тепловую энергию.
4. Распределение масс частей тела
От распределения масс частей тела зависят многие сопротивления, которые встречают силы, действующие на тело. Эти сопротивления определяются силами тяжести и моментами инерции частей тела. Наиболее общим показателем распределения масс в теле служит общий центр тяжести тела (ОЦТ). Как известно, центром тяжести называется точка тела, к которой как бы приложена равнодействующая всех сил тяжести тела. Во все стороны от этой точки, по любому направлению, моменты сил тяжести взаимно уравновешиваются. Равнодействующая параллельных сил, действующих на все частицы тела в любом направлении, приложена к ОЦТ; поэтому в этом случае ОЦТ называют еще центром массы, или центром инерции. Расположение ОЦТ необходимо знать при изучении статики для оценки условий равновесия тела. Путь движения — траектория ОЦТ — во многих случаях дает ценные сведения об особенностях движения тела, так как отражает действие внешних сил на тело. ОЦТ не может перемещаться иначе как под действием внешних сил. Одни внутренние силы никогда не могут изменить положение и путь ОЦТ в пространстве. Общий центр тяжести тела располагается в зависимости от телосложения человека. У людей с более развитыми ногами ОЦТ относительно ниже, чем у людей с более мощной мускулатурой туловища и рук. У длинноногих людей ОЦТ анатомически расположен ниже, но он дальше от земли, чем у коротконогих. В симметричных положениях человека, стоящего с опущенными руками, ОЦТ находится на уровне от первого до пятого крестцового позвонка (по Иваницкому), примерно на 4–5 см выше поперечной оси тазобедренных суставов. Переднезадняя плоскость, проходящая через ОЦТ, делит тело почти симметрично. Она несколько смещена вправо от срединной плоскости, так как правая половина тела человека тяжелее левой на 400–500 г, в связи с несимметричным расположением внутренних органов и неравномерным развитием двигательного аппарата. У правшей правая половина тела развита лучше и имеет большую массу. В переднезаднем направлении ОЦТ располагается между крестцом и лобком в зависимости от положения тела при стоянии. Само собой разумеется, что с изменением формы тела, вследствие иного расположения его частей, изменяет свое положение и ОЦТ. При перемещении какой-либо части тела и ОЦТ смещается в том же направлении. Если переметающаяся часть тела имеет большую массу, то и смещение ОЦТ больше. Массы частей тела определяли путем распила замороженных трупов, а также путем измерения объема частей тела и уравновешивания живых людей в различных позах. Средние данные, полученные этими различными методами, оказались близкими друг к другу. Так, если вес тела человека принять за 100 %, то вес головы составит 7 %; туловища — 43 %; бедра — 12 %; голени — 5 %; стопы — 2 %; плеча — 3 %; предплечья — 2 % и кисти — 1 %. Если средние данные более или менее близки, то данные отдельных людей могут значительно отличаться от этих средних в зависимости от телосложения. Массы отдельныхчастей тела не остаются постоянными. В связи с тренировкой здесь могут происходить немалые изменения. У спортсменов меньше отложения жира на туловище и лучше развиты мышцы конечностей. Поэтому у них соотношение масс может быть иное, чем у людей, не занимающихся спортом. Массы тела могут также изменяться и в течение коротких промежутков времени. Например, прием пищи и воды может увеличить массу туловища; после разминки или соревнований прилив крови в расширенные сосуды мышц может увеличить массу конечностей. Таким образом, относительные массы частей тела человека в конкретных случаях могут намного отличаться от точно вычисленных средних данных. Поэтому нет необходимости в очень большой точности при расчетах, производимых с практической целью. Вполне достаточно эти величины в процентах округлить, так как индивидуальные отклонения от них могут быть намного больше, чем на сотые и десятые доли процента. Для положения ОЦТ имеет значение не только масса частей тела, но и ее распределение в каждой части тела. Показателями этого служат центры тяжести частей тела. Центры тяжести длинных частей тела лежат приблизительно на их продольной оси, ближе к проксимальному сочленению. Так, расстояние от проксимального сочленения до центра тяжести (радиус центра тяжести) составляет для бедра 0,44 его длины, для голени 0,42, для плеча 0,47 и для предплечья 0,42. Такое распределение масс обусловлено большой массой мышц, окружающих проксимальные сочленения, особенно для бедра, голени и предплечья. Предплечья и голени имеют мышцы с отчетливо выраженным брюшком и тонким сухожилием. А на бедре в области тазобедренного сустава есть большие массы коротких мышц — ягодичные, приводящие, запирательные и др. Этими особенностями и определяется неравномерное распределение масс в этих частях тела. Строго говоря, при изменении напряжения мышц и их кровенаполнения распределение масс в конечностях также несколько изменяется. Но значительно больше оно изменяется у туловища, способного очень сильно изменять свою форму. Принято считать, что центр тяжести туловища располагается на линии, соединяющей середины поперечных осей, проведенных через центры плечевых и тазобедренных суставов. Эту линию, центр тяжести туловища делит на отрезки, относящиеся друг к другу как 4:5, считая от головного конца. По сути дела туловище — не отдельное звено, а система звеньев, обладающая большой подвижностью. Кроме того, надо учитывать изменение распределения масс туловища при вдохе, когда внутренние органы брюшной полости оттесняются вниз, а грудная клетка, наполненная воздухом, имеет меньший удельный вес. При некоторых положениях отдельные органы брюшной полости могут смещаться на значительное расстояние (до 20 см) (Джафаров). Значит, при всех расчетах положения ОЦТ имеются очень большие погрешности, связанные с тем, что подвижно соединенные части тела и части тела, в которых изменяется распределение масс, принимаются за неизменяемые тела. Лишь у головы расположение центра тяжести сзади турецкого седла клиновидной кости довольно постоянно, но и оно может измениться при движениях нижней челюсти. Расположение ОЦТ обусловлено половыми и возрастными особенностями. У детей, имеющих большую массу туловища и головы, ОЦТ располагается выше, чем у взрослых. У женщин, в связи с присущей им пропорцией тела, в частности с более массивным тазовым поясом, ОЦТ располагается ниже, чем у мужчин. Для определения действия сил окружающей среды при изучении движений человека в водной среде, а также в полете в воздухе с большой скоростью необходимо знать расположение центра объема (ЦО) и центра поверхности (ЦП). Центр объема тела расположен в точке пересечения плоскостей, делящих тело на две равные по объему половины. С погружением в воду на тело действуют силы давления воды. Точка приложения равнодействующей всех сил давления воды на поверхность тела и называется центром объема тела. ЦО можно рассматривать так же, как ОЦТ объема воды, вытесненной погружением тела человека в воду и имеющей форму погруженных частей тела. В то же время на тело действуют силы тяжести, равнодействующая которых приложена к ОЦТ. Когда ЦО и ОЦТ расположены на одной вертикали, тогда, в зависимости от соотношения величин сил тяжести и давления воды, тело либо всплывает, либо тонет, либо остается неподвижным в воде. Если ЦО и ОЦТ находятся не на одной вертикали, то еще возникает пара сил, вызывающих вращение тела. У человека ЦО расположен несколько выше его ОЦТ. Это объясняется тем, что содержащийся в грудной клетке воздух делает верхнюю половину тела более легкой, поэтому ОЦТ смещен несколько в сторону ног. В связи с этим человек при спокойном положении на воде во время вдоха начинает поворачиваться, опускаясь ногами вниз. Если руки сместить в сторону головы, то можно совместить ЦО и линию тяжести, тогда тело уравновесится. По данным Иваницкого, ЦО расположен выше ОЦТ на 26 см, в зависимости от особенностей телосложения. Естественно, что с изменением позы тела изменяется и расположение ЦО. Во время движения человека со значительной скоростью через воздушную среду силы сопротивления воздушной среды зависят от площади лобовой поверхности тела. Равнодействующая всех сил сопротивления среды приложена к центру поверхности. Граница поверхности сопротивления определяется по проекции границы тела на плоскость, перпендикулярную направлению движения тела относительно среды. У тела человека, стоящего в выпрямленном положении, ЦП тела при движении в переднезаднем направлении располагается выше ОЦТ. В безопорном положении при движении в воздухе, например при прыжках на лыжах с трамплина, изменение позы вызывает изменения и лобовой поверхности тела (вместе с лыжами), а следовательно и ЦП. Когда ЦП ниже ОЦТ, лыжник вращается головой вперед. Если ЦП оказывается выше ОЦТ, то тело получает вращение головой назад. При расположении ОЦТ и ЦП на одной линии, параллельной направлению полета, вращения не возникает.
Глава 1 КИНЕМАТИКА: ОПИСАНИЕ ДВИЖЕНИЯ
Человеческий скелет, говоря буквально, представляет собой систему компонентов или рычагов. Рычаг может иметь любую форму, и каждую длинную кость можно представить себе в виде твердого стержня, который может передавать, принимать, модифицировать силу и движение. Кинематические переменные для данного движения могут включать в себя: 1) тип происходящего движения; 2) местоположение движения; 3) направление движения; 4) амплитуду движения; 5) частоту или длительность движения.1.1. Типы движений
Существуют три типа движений, характерных для любого твердого объекта, или три траектории, по которым твердый объект может двигаться. В человеческом теле мы будет рассматривать траекторию, по которой идет один или более его компонентов-рычагов. Вращательное (угловое, пронация, супинация) движение — это движение объекта или сегмента вокруг фиксированной оси по криволинейной траектории. Каждая точка на объекте или сегменте проходит тот же самый угол, в одно и то же время, на одинаковом расстоянии от оси вращения. Поскольку все движения человека должны происходить в суставах, представляется, что задачей мышц является вращение костного рычага вокруг относительно фиксированной оси (рис. 1.1).
Рис. 1.1. Вращательное движение (ротация). Каждая точка сегмента «предплечье/кисть» движется под одинаковым углом, одновременно и на постоянном расстоянии от оси вращения (А)
Очень немногие суставы в человеческом теле движутся вокруг истинно фиксированных осей, вряд ли такие суставы есть вообще. Аналогично трудно встретить рычаг, который оставался бы полностью фиксированным в то время, когда движутся остальные. В целях большей простоты, движение суставов обычно описывают так, как если бы оно представляло собой чистое вращение одного движущегося сегмента на другом, неподвижном. В некоторых случаях такое упрощение годится, но отнюдь не во всех. Поступательное (линейное) движение — это движение объекта или сегмента по прямой линии. Каждая точка объекта проходит одинаковое расстояние, за одно время, по параллельным траекториям. Поступательное движение сегмента тела без сопутствующего вращения происходит редко. Слишком упрощая, мы можем проиллюстрировать поступательное движение на примере комбинированного сегмента предплечья и кисти при попытке взять предмет (рис. 1.2).
Рис. 1.2. Поступательное движение. Каждая точка сегмента «предплечье/кисть» проходит одинаковое расстояние, за одно и то же время, с параллельными траекториями
В этом случае все точки сегмента «предплечья/кисти» проходят одинаковое расстояние за одинаковое время. Однако следует заметить, что поступательное движение этого сегмента на самом деле создается за счет вращения как плечевого, так и локтевого суставов. Это похоже на «поступательное движение» головы в пространстве во время ходьбы по ровной почве. При ходьбе голова перемещается в пространстве поступательно, однако делает она это за счет последовательности суставных движений, происходящих преимущественно в нижних конечностях. В движениях человеческих суставов исходя из таких понятий, как ротация в суставах, форма поверхностей (и силы, создающие движение), результирующее поступательное движение между суставными поверхностями даже притом, что оно очень невелико по амплитуде, очень важно для понимания того, что такое перегрузка сустава, и что такое стабильность сустава. Истинное поступательное движение костного рычага без сопутствующего вращения может до определенной степени происходить в суставе, когда одну кость тянут от сустава, или, наоборот, вдавливают в сустав. Другой формой поступательного движения является параллельное смещение одной кости относительно плоской суставной поверхности смежной кости. Этот тип поступательного движения кости называется скольжением. На самом деле большинство суставных поверхностей имеет хотя бы небольшую кривизну, поэтому скольжение в большинстве случаев не является чисто поступательным движением. Вращательные и поступательные движения в человеческих суставах чаще всего происходят совместно. Хотя вращения могут доминировать в большинстве суставов, имеется и достаточное для смещения в пространстве оси вращения сопутствующее скольжение. Когда объект вращается по оси и одновременно перемещается в пространстве, он идет по третьему варианту траектории, известному как траектория криволинейного движения. Классический пример криволинейного движения за пределами тела — брошенный мяч, который перемещается в пространстве и одновременно вращается вокруг собственной оси. В таком контексте криволинейное движение — это ротация твердого объекта в пространстве. Криволинейное движение в человеческом теле является наиболее распространенным, это та траектория, по которой твердый костный сегмент движется в суставе. Однако поступательный компонент движения может быть довольно незаметным и, при рассмотрении вращений сустава его часто игнорируют. Более явный пример комбинации ротации и поступательного движения приводится на рис. 1.3. Здесь сегмент «предплечье/кисть», держащий бутерброд, вращается вокруг оси локтевого сустава, но одновременно с этим сгибание плеча перемещает его вперед. Поскольку ось локтевого сустава совершает поступательное движение одновременно с вращением вокруг нее сегмента «предплечья/кисти», этот сегмент, держащий бутерброд, описывает параболическую траекторию.

Рис. 1.3. Криволинейное движение. Сегмент «предплечье/кисть» движется по параболе, так как вращение происходит в локтевом суставе. Локтевой сустав перемещается в пространстве за счет ротации в плечевом суставе
1.2. Плоскость движения
Кинематическое описание движения должно включать в себя сегменты и суставы, находящиеся в движении, а также место или плоскость движения. Если мы возьмем трехмерную систему координат, используемую в математике, то движение в суставе можно рассматривать как происходящее в горизонтальной (поперечной) или фронтальной (венечной) и сагиттальной (переднезадней — ПЗ) плоскости. Движение в любой из этих плоскостей означает, что сегмент тела вращается по своей оси или поступательно смещается таким образом, что движется по траектории, параллельной одной из трех основных плоскостей: протракция и ретракция. Человеческие движения не ограничиваются только основными плоскостями, они зачастую проходят в специфических плоскостях. Однако система плоскостей и осей дает простой способ описания движений, которые могут происходить в данном суставе. Поскольку плоскость движения теоретически может изменяться при перемене положения тела (например, стоя или лежа), традиционно принято рассматривать движения так, как они производятся человеком, стоящим в так называемой анатомической позиции: человек стоит, смотрит вперед, ладони также обращены вперед. Универсальная координата Х соответствует основной горизонтальной плоскости. Эта плоскость делит тело на верхнюю и нижнюю половину (рис. 1.4).

Рис. 1.4. Горизонтальная плоскость
Движения в горизонтальной плоскости происходят параллельно земле. Например, при повороте головы нос движется параллельно земле. Вращательные движения в горизонтальной плоскости происходят вокруг вертикальной или продольной оси движения. Термин «продольная ось» используется, когда ось движения, проходит вдоль кости. Ось любого движения в основной плоскости располагается перпендикулярно к соответствующей плоскости. Координата Y соответствует фронтальной (венечной) плоскости. Фронтальная плоскость делит тело на переднюю и заднюю половину (рис. 1.5).

Рис. 1.5. Фронтальная плоскость
Движения во фронтальной плоскости происходят из стороны в сторону, называясь латерофлексией (боковым наклоном). Например, поочередные наклоны головы к правому и левому плечу. Вращательные движения во фронтальной плоскости происходят в переднезадней (ПЗ) оси. Координата Z соответствует сагиттальной плоскости и делит тело на правую и левую половину (рис. 1.6).

Рис. 1.6. Сагиттальная плоскость
Движения в этой плоскости включают в себя движения вперед — флексия (сгибание, представляющее собой движения в сагиттальной плоскости, которое переносит часть тела вперед от анатомической позиции) и назад — экстензия (разгибание — это движение в сагиттальной плоскости, направляющее часть тела назад от анатомической позиции), такие как кивок головой. Вращательное движение в сагиттальной плоскости выполняется вокруг вертикальной оси (ротация).
1.3. Направление движения
Если мы сужаем движение до одной плоскости, это еще не указывает на направление движения в этой плоскости. Нам нужно больше описаний. Для вращательных движений направление движения рычага вокруг оси может быть описано как движение по часовой стрелке или против часовой стрелки. Однако эти термины зависят от расположения наблюдающего (если смотреть слева, сгибание локтя будет движением по часовой стрелке, но если испытуемый разворачивается на 180°, то это же движение для оставшегося на месте наблюдателя будет выполняться уже против часовой стрелки). Движениям по часовой стрелке и против часовой стрелки традиционно соответствуют знаки «+», «-». Анатомические термины, описывающие движения человека, зависят от положения наблюдающего и, таким образом, будут для нас более полезными. Сгибание (flexion) — это ротация одного или обоих костных рычагов вокруг оси сустава, при которой вентральные поверхности их сближаются. Ротация в этой же плоскости, но в противоположном направлении (сближение дорсальных поверхностей) называется разгибанием (extenzion). Обычно сгибание и разгибание происходят в сагиттальной плоскости вокруг вертикальной оси, хотя существуют и исключения (пястно-запястное сгибание и разгибание большого пальца ноги). Отведение (abduction) — это ротация одного или обоих сегментов сустава вокруг оси, при которой дистальный сегмент идет в направлении от средней линии тела. Приведение (adduction) совершается в той же плоскости, но в противоположном направлении (движение дистального рычага сустава идет в направлении средней линии тела). Если движущийся сегмент является частью средней линии тела (например, туловище или голова), это движение обычно называют латеральным, или боковым сгибанием (латерофлексия: наклон в сторону). Отведение/приведение и боковое сгибание обычно совершаются во фронтальной плоскости вокруг сагиттальной оси. Движение сегмента тела в горизонтальной плоскости вокруг вертикальной или продольной оси обычно называют медиальным или латеральным вращением (ротацией). Медиальное (внутреннее) вращение — это ротация в направлении средней линии тела; латеральное (внешнее) вращение — это движение в противоположном направлении. Если сегмент является частью средней линии, движение в поперечной плоскости называют просто — ротация влево или ротация вправо. Исключения названных движений из общих правил следует изучать отдельно по суставам. Описания направлений поступательных движений обычно оценивают знаками «+» или «-» в системе координат. Движения, совершаемые вправо, или вверх, обычно считаются положительными, движения влево или вниз — отрицательными. Как будет рассказано в подробностях далее, мы можем называть поступательное движение сегмента по направлению к суставу компрессия (сжатие), а поступательное движение в направлении от сустава — тракция (растяжение), движение от сустава вперед в горизонтальной плоскости (протракция — растяжение), а движение в этой плоскости назад ретракция.
1.4. Амплитуда и величина движения
Амплитуда или количество вращательного движения может измеряться либо в градусах, либо в радианах. Если сегмент описывает окружность, то он проходит 360° или 6,28 радиан. Радиан — это отношение длины дуги к радиусу окружности (рис. 1.7).

Рис. 1.7. Измерение амплитуды сустава. Угол в 57,3° — дуга, равная 1 радиан (1 рад)
Один радиан равен 57,3°, соответственно 1° равен 0,01745 радиана. Чаще всего при клинических измерениях амплитуды сустава применяется стандартизированный метод, называемый гониометрией, измерение производится в градусах. Величина движения может выражаться также в количестве градусов, проходимых объектом за секунду (угловая скорость). Когда угловая скорость (только амплитуда движения) дается в заданном направлении, она становится векторным количественным показателем скорости. К настоящему времени появилась масса приборов, позволяющих регистрировать изменения суставных углов и угловой скорости по времени. Так, с помощью компьютера можно построить последовательный график, например, такой как приведен на рис. 1.8.

Рис. 1.8. График амплитуды движения сустава
Он дает графическое изображение не только суставного угла между двумя костными сегментами в конкретный момент времени, но еще и указывает направление движения. Крутизна наклона линии графика представляет собой угловую скорость. Так, если на графике амплитуду движения сустава представить по оси Y (вертикальной), а время — по горизонтальной оси Х, получившийся временной график представляет собой изменение положения сустава по времени. Угол наклона линии графика отражает скорость изменения положения сустава (см. рис. 1.8). Поступательные движения количественно выражаются при помощи линейного расстояния (перемещение), которое прошел объект или сегмент. Единицы измерения могут быть разными, но в этой книге мы будем использовать килограммы, сантиметры и секунды, т. е. Международную систему единиц (СИ). Перемещение за единицу времени в определенном направлении (линейная скорость) может рассматриваться как вариант описания величины движения.
Глава 2 КИНЕТИКА: АНАЛИЗ СИЛ
2.1. Определение силы. Векторы и обозначения сил
Определение силы. Кинематические описания человеческого движения позволяют нам визуализировать движение, но не дают понимания того, почему оно происходит. Это требует изучения сил. Находится ли тело или сегмент тела в движении, или в покое, зависит от сил, действующих на тело. Говоря упрощенно, сила — это давление или тяга, оказываемая одним материальным предметом или веществом на другой. Иными словами, любую силу фактически можно рассматривать либо как давление, толчок, либо как тягу, прилагаемую предметом А к предмету Б. Такая концепция силы (толчок/тяга) также может использоваться для описания сил, встречающихся при оценке движения человека. Внешние силы — это тяга или давление, оказываемые на человеческое тело и происходящие из источников вне тела. Сила тяжести является внешней силой, которая в нормальных условиях действует на любые объекты. По этой причине сила тяжести является той внешней силой, действующей на человеческое тело, которую следует рассматривать в первую очередь. Сила тяжести — это сила, действующая на любую материальную частицу, находящуюся вблизи земной поверхности. Сила тяжести — это только одна из бесчисленного множества внешних сил, действующих на тело человека. Внутренние силы — это такие силы, которые действуют на тело, но источники их находятся внутри самого тела. Примерами являются мышцы (двуглавая мышца плеча тянет лучевую кость), связки (они тянут кости) и кости (одна кость давит на другую). Внутренние силы необходимы для функционирования организма, потому что если зависеть только от внешних сил, трудно создать целенаправленное движение сегмента тела. Что еще более важно, внутренние силы противодействуют внешним силам, стремящимся нарушить целостность суставной структуры человека. Некоторые силы, такие как сила трения и атмосферное давление, могут действовать как снаружи тела, так и внутри. Векторы сил. Все силы, независимо от источника, или объекта приложения, являются векторными величинами и могут быть описаны при помощи: • точки приложения или направления воздействия; • линии; • величины (количества) прилагаемой силы. Вектор силы традиционно изображают в виде стрелки: 1) стрелка указывает точку приложения на объекте; 2) стержень указывает направление действия силы; 3) определенную длину, указывающую на количество прилагаемой силы (величину). В метрической системе мер единицей измерения силы является ньютон (H)[1]. Дополнительной единицей измерения, принятой в метрической системе, является дина (1 дина = 10-5 H) и килограмм-сила (1 кгс ~ 10 H). На рис. 2.1 показана рука, толкающая книгу. Сила воздействия руки на книгу обозначена вектором («рука-книга» — РК).

Рис. 2.1. Вектор РК (рука-книга) представляет собой величину и направление силы, действующей со стороны руки на книгу
Точка приложения находится на корешке книги, линия и направление действия обозначают направление давления, длина вектора указывает на величину усилия. Длина вектора обычно берется в масштабе, пропорциональном величине усилия. Например, если мы возьмем масштаб типа: 4,5 кг = 0,64 см, то стрелка в 0,95 см будет соответствовать силе в 6,8 кг. Однако длину вектора не всегда надо изображать в масштабе. Линию действия каждого вектора можно рассматривать как бесконечно длинную, т. е. любой вектор можно продолжать бесконечно в любом направлении, если это поможет в определении отношения этого вектора с другими векторами или объектами. Однако в случае заданного масштаба длина вектора не должна быть произвольной. Пример вектора (в данном случае — вектор МК), описывающего силу, с которой мышца действует на костный рычаг в теле, показан на рис. 2.2.

Рис. 2.2. Вектор «мышца-кость» (МК) представляет собой тягу кости мышцей силой в 10 кг
Эту силу можно называть «мышца-кость» (МК). Точка приложения силы находится на кости, которая и является объектом воздействия. Линия и направление действия указывают в направлении мышечной тяги, а величина силы (использован масштаб 1 см = 4,5 кг) равна 9 кг. Обозначения сил. Когда при обозначении используется традиция идентификации сил «предмет на предмет», первой частью обозначения силы всегда будет источник силы, а второй — объект, на который она действует. Это означает, что точка приложения всегда находится на втором обозначаемом объекте (объект приложения силы всегда становится ее «именем»). Линия действия и направление силы будут в случае тяги направлены к источнику, а в случае толчка — от источника. Источник толчка (давления) или тяги всегда становится «фамилией» силы. На рис. 2.3 показан человек, держащий в обеих руках ящик весом в 30 кг. На рисунке можно, используя традицию, о которой мы только что говорили, идентифицировать и обозначить два вектора. Точка приложения вектора Пр. (действие веса коробки на правую руку) находится на правой руке и вектора Лев. (действие веса коробки на левую руку) — на левой руке. Таким образом, Пр. можно предварительно обозначить как «действие предмета на правую руку», а Лев, — как «действие предмета на левую руку».

Рис. 2.3. Примеры векторов Пр. и Лев., представляющих собой контакт (давление) 15 кг коробки на каждую руку, где Пр. — коробка на правой руке, а Лев. — коробка на левой руке
Источник большинства сил, воздействующих на предмет (тело), должен касаться или входить в контакт с объектом. Основным исключением из этого правила, если мы рассматриваем силы, действующие на человеческое тело, является сила тяжести. В качестве допущения принято представлять себе, что сила тяжести «контактирует» со всеми предметами на земле. Нам следует исходить из такого допущения и придерживаться того правила, что сила, действующая на сегмент в теле человека, должна исходить из чего-то касающегося этого сегмента: • силы, воздействующие на предмет, исходят от вещей, касающихся этого предмета; • сила тяжести действует на все предметы на земле (т. е. всегда находится в контакте с ними). На рис. 2.3 руки (кисти) находятся в очевидном контакте с коробкой. Каждый сегмент кисти также находится в контакте со смежным сегментом предплечья. Кроме контакта коробки с кистями и контактов кисти и предплечья, каждая рука находится «в контакте» с силой тяжести. Соответственно, у нас имеются три возможных «имени» для необозначенных векторов. Мы можем еще более сузить имя (источник), понимая, что в данном случае источник может оказывать только давление (действие, направленное от источника), или тягу (действие, направленное к источнику). Давление или тяга, оказываемые предплечьями, должны находиться с ними в одной линии. Поскольку Пр. и Лев. в одной линии с предплечьями не находятся, мы можем предплечьями, как источниками векторов, пренебречь. Коробка будет давить на кисти и таким образом являться вероятным источником векторов Пр. и Лев. Сила тяжести также является вероятной, поскольку в данном случае именно она тянет кисти к земле. Без дальнейшей информации нам не определить, что именно является источником векторов Пр. и Лев — действие силы тяжести на правую и левую кисть или действие на них же коробки. Если бы были известны масштаб и длина векторов Пр. и Лев. можно было бы сделать конечное определение векторов. Если мы возьмем масштаб 10 см = 30 кг, и векторы Пр. и Лев. будут каждый по 5 см, то величина каждой из сил окажется равной 15 кг. Поскольку коробка действует на каждую кисть с силой 6,8 кг, то она, по всей вероятности, и является источником векторов Пр. и Лев.
2.2. Сила тяжести
Сила тяжести — это сила, действующая на любое тело, находящееся вблизи земной поверхности. Сила тяжести придает вес предметам, который обычно равен массе предмета, умноженной на ускорение свободного падения: (P = mg) Вес = масса х 9,8 м/с2 (величина ускорения свободного падения). Величина веса, который является силой, выражается в ньютонах в Метрической системе. В Метрической системе мер единицей массы служит килограмм. Единицы массы являются скалярными величинами (не имеющими линии и направления действия), тогда как ньютон является единицей силы, обладающей векторными характеристиками. Сила тяжести является наиболее постоянной силой, с которой сталкивается тело человека, и ведет она себя вполне предсказуемо. Как величина векторная, ее можно полностью описать при помощи точки приложения, линии действия/направления и величины. Хотя сила тяжести действует во всех точках предмета, основной ее точкой приложения является центр тяжести (ЦТ). Центр тяжести является гипотетической точкой концентрации массы и точкой, в которой происходит действие силы тяжести. В симметричном предмете ЦТ расположен в геометрическом центре предмета (рис. 2.4,а).
В асимметричном предмете ЦТ смещен к более тяжелому концу, где масса равномерно распределена вокруг точки (рис. 2.4,b).
На рис. 2.4,с изображен костыль, который показывает, что ЦТ — на самом деле точка гипотетическая, и она совершенно не обязательно должна находиться внутри собственно предмета.
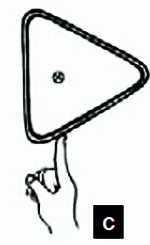
Рис. 2.4. Центр тяжести предмета: а — симметричного; b — несимметричного; с — ЦТ находится вне границ предмета
Но даже если ЦТ находится вне границ предмета, он все равно продолжает оставаться точкой, на которую действует сила тяжести. Расположение ЦТ любого предмета можно произвести достаточно большим количеством методов, рассмотрение которых не входит в задачу данной книги. Однако ЦТ предмета можно всегда приблизительно вычислить по точке равновесия (предполагая, что вы можете сбалансировать этот предмет на одном пальце или точечной опоре). Линия действия и направление силы тяжести — всегда вертикально вниз, к центру Земли, независимо от ориентации предмета в пространстве. Обычно вектор силы тяжести называют линией силы тяжести (ЛСТ) или линией гравитации (ЛГ). Длина линии тяжести при изучении других взаимосвязей может быть масштабирована или выражена несколько произвольно. Лучше всего представлять ее себе в виде отвеса, верхний конец которого прикреплен к ЦТ предмета. Линия отвеса от ЦТ предмета дает точное представление о точке приложения, направлении и линии действия силы тяжести, но не ее величина.
2.2.1. Сегментарные центры тяжести На каждый сегмент тела действует сила тяжести, каждый сегмент тела имеет собственный ЦТ. Можно сгруппировать два и более смежных сегмента, если вместе они будут двигаться как единый жесткий сегмент. Если сегменты сгруппированы, то действие силы тяжести на них будет представлено единым ЦТ. На рис. 2.5,а показаны векторы силы тяжести в центре плеча (ЦПл), предплечья (ЦП) и кисти (ЦК), с учетом того, что рука рассматривается как единый сегмент.
Центры тяжести близки к тем, которые были установлены в исследованиях на трупах и in vitro на сегментах тела, имеющих стандартизованные данные по центрам массы и весу отдельных и комбинированных сегментов тела. Когда два смежных сегмента комбинируются и рассматриваются, как единый жесткий сегмент, то новый, больший сегмент, будет иметь ЦТ, расположенный между двумя прежними ЦТ и находящийся с ними на одной линии. Если сегменты не равны по массе, то новый ЦТ будет находиться ближе к более тяжелому сегменту. На рис. 2.5,b показан вектор ЦПл для плеча и новый вектор ЦПК для сегмента «предплечье/кисть».
В единый сегмент были скомбинированы предплечье и кисть. Новый ЦТ для этого сегмента находится между двумя исходными ЦТ, а величина вектора равна сумме ЦП + ЦК. На рис. 2.5,с в один жесткий объект скомбинированы все три сегмента, и сила тяжести (ЦПл ПК) действует уже на новый ЦТ, находящийся между ЦПл и ЦПК. Величина ЦПлПК равна сумме величин каждого из составляющих сегментов.

Центр тяжести любого жесткого объекта, или фиксированной последовательности сегментов, остается неизменным независимо от положения этого объекта в пространстве. Однако когда объект состоит из двух и более связанных и подвижных сегментов, расположение ЦТ в этой комбинации будет меняться, когда меняется положение одного сегмента относительно другого. На рис. 2.5,d изменяется положение плеча и сегмента «кисть/предплечье».

Рис. 2.5. Сила тяжести, действующая на: a — плечо (ЦПл), предплечье (ЦП) и кисть (ЦК); b — плечо и предплечье/ кисть (ЦПК); c — сегмент «плечо/предплечье/кисть» (ЦПлПК); d — при изменении конфигурации сегментов ЦПлПК смещается
Величина силы тяжести не изменилась, поскольку не изменилась масса сегментов, а вот расположение вектора ЦПлПК теперь отличается от показанного на рис. 2.5,с. Новое положение ЦТ по-прежнему находится на линии между двумя исходными ЦТ. Однако здесь мы имеем еще один пример выхода ЦТ за пределы жесткого сегмента «кисть/предплечье/ плечо».
2.2.2. Центр тяжести человеческого тела Когда тело рассматривается как единый жесткий объект в анатомическом положении, ЦТ тела находится немного спереди от второго крестцового позвонка (рис. 2.6).


Рис. 2.6. Центр тяжести человеческого тела находится приблизительно на уровне 2-го крестцового позвонка (S2), спереди от крестца (см. вставку): ЦОГ — центральная ось гравитации
Точное положение ЦТ человека в анатомической позиции зависит от его пропорций, а сила тяжести зависит от веса тела (и равна ему). Если бы человек был жестким объектом, то положение ЦТ было бы постоянным, независимо от того, стоит тело, лежит, или наклоняется вперед. Хотя ЦТ не меняет своего положения в твердом теле, какое бы положение в пространстве оно не занимало, ЛТ (линия тяжести) может изменять свое положение относительно тела. На рис. 2.6 ЛТ опускается между стопами и идет параллельно телу. Поскольку вертикальное направление ЛТ остается неизменным вне зависимости от положения тела в пространстве, то направление ЛТ, исходящей от лежащего тела, будет уже не параллельным, как при положении стоя, а перпендикулярным относительно тела. В реальности люди, конечно же, не являются идеально жесткими, они не находятся постоянно в анатомическом положении и при выполнении своих действий постоянно меняют взаимное расположение сегментов тела. При каждой «перестановке» сегментов тела расположение ЦТ потенциально будет меняться. Величина такого изменения расположения ЦТ зависит от того, как расположены сегменты. Если рассматривать тело как конструкцию из жесткой верхней части тела и такого же жесткого сегмента нижних конечностей, то ЦТ для каждого из сегментов будет расположен примерно так, как показано на рис. 2.7,а.
Комбинированный ЦТ обоих сегментов в анатомическом положении находится по-прежнему в S2. Когда туловище наклоняется вперед, новый ЦТ выходит за пределы тела (см. рис. 2.7,b).

Рис. 2.7. Расположение центра тяжести: a — верхней части туловища и нижних конечностей; b — перемена положения сегментов создает новый комбинированный ЦТ
На рис. 2.8 показано еще более непропорциональное расположение сегментов. Два отдельных сегмента нижних конечностей и единый сегмент тела образуют новый ЦТ, находящийся в точке ABC.
Рис. 2.8. Площадь опоры, ограничивающаяся площадью пальцев одной стопы. ЦТ левой ноги (A) и правой ноги (B) вместе образуют центр тяжести — (ЦТ) нижних конечностей (AB). AB в сочетании с центром тяжести туловища (C) образуют ЦТ всего тела (ABC)
2.2.3. Устойчивость и центр тяжести На рис. 2.8 линия тяжести (ЛТ) (ЦТ АВС) проецируется за пределы пальцев левой ноги футболиста, которые в этот момент служат ему площадью опоры ПО. Для того чтобы показать ее связь с ПО, линия была продолжена. Это продолжение линии уже не может указывать, естественно, на вес игрока, но точка приложения, линия действия и направление остаются теми же. Чтобы объект был устойчивым, ЛТ должна опускаться в пределах ПО. Если ЛТ проходит вне пределов ПО, предмет падает. В случае с футболистом (см. рис. 2.8), ЛТ проходит спереди от ПО, соответственно удерживать такое положение тела игрок не в состоянии. При движении игрока из начального положения (опора на обе ноги, руки по бокам) в позу, показанную на рис. 2.8, изменились два фактора. Площадь опоры резко уменьшилась, и теперь ограничивается площадью пальцев одной стопы. Центр тяжести вследствие изменения положения сегментов поднялся выше S2. Эти два фактора, в сочетании с небольшим наклоном вперед, влияют на смещение ЛТ и способствуют созданию неустойчивого положения. Когда ПО больше, то ЛТ имеет больше свободы для движения без выхода за пределы опоры. Когда человек стоит, широко расставив ноги, поперечная (из стороны в сторону) опора больше, и туловище в этой плоскости может двигаться больше без выхода ЛТ за пределы ПО (рис. 2.9). Если человек хватается, или прислоняется к какому-либо предмету, этот предмет может стать частью площади опоры.

Рис. 2.9. Широкая площадь опоры, позволяющая производить большие смещения линии оси гравитации (ЦТ) без выхода ее за площадь опоры
На рис. 2.10 балерина находится в той же позе, что и футболист (см. рис. 2.8). Однако при этом она может сохранять это положение тела, поскольку ее площадь опоры включает не только пальцы ног, но и пространство между ней и станком. Она будет оставаться в устойчивом положении, пока ее ЛТ находится где-то в пределах увеличенной площади опоры.

Рис. 2.10. Увеличенная площадь опоры. Хотя изменение положения сегментов тела поднимает ЦТ и смещает ЛТ за пределы стопы, она остается в равновесии, поскольку ЛТ четко проецируется в пределы расширенной площади опоры, создаваемой хватом за станок
Если ЦТ находится низко, движения предмета в пространстве не вызывают выхода ЦТ и ЛТ за пределы площади опоры. Если взять метровый отвес в руку и покачивать им над землей, то отвес будет ходить по довольно широкой дуге внизу, притом, что рука почти не двигается. Если же взять тот же отвес, но длиной 15 см и проделать то же самое, дуга будет существенно меньшей. Чем длиннее ЛТ, т. е. выше ЦТ, тем менее устойчив объект. Чем ЛТ короче (а ЦТ ниже), тем объект устойчивее. На рис. 2.11 показан «Ванька-встанька», качающийся во все стороны.

Рис. 2.11. Устойчивость предмета на примере игрушки «Ваньки-встаньки». Поскольку ЦТ «Ваньки-встаньки» находится очень низко, ЛТ остается в пределах площади опоры независимо от перемены положений
Основание у «Ваньки-встаньки» тяжелое (обычно его заполняют песком, заливают свинцом и т. п.), а верх — легкий. Положение ЦТ у этой игрушки будет всегда одинаковым, как бы ее не раскачивали. «Ванька-встанька» раскачивается в стороны гораздо с большей амплитудой, чем человек на рис. 2.9, даже несмотря на то, что площадь опоры у него значительно меньше. Эта игрушка отличается удивительной устойчивостью, за счет короткой ЛТ практически невозможно вывести за пределы площади опоры. Итак, если рассматривать устойчивость предмета или человеческого тела, то выделяют следующее: • чем больше ПО, тем больше устойчивость; • чем ближе ЦТ и ПО, тем устойчивее предмет; • предмет не является устойчивым, если ЛТ за пределом ПО.
2.2.4. Перемещение центра тяжести Расположение ЦТ предмета или тела зависит не только от положения сегментов в пространстве, но также и от распределения массы объекта. Люди могут набирать вес, который может по телу распределяться непропорционально (соответственно, смещая ЦТ). Однако наиболее общим способом функционального (в отличие от буквального) перераспределения массы является добавление внешней массы. Всякий раз, когда к телу добавляется какой-либо предмет, который мы надеваем на спину (рюкзак), несем (ящик) или используем (дрель), ЦТ новой комбинации тела и внешней массы смещается в направлении дополнительного веса. Смещение обычно пропорционально величине дополнительного веса. У человека на рис. 2.12 на правой ноге гипс.

Рис. 2.12. Сдвиг центра тяжести вниз и вправо. Дополнительный вес гипса смещает ЦТ. Костыли увеличивают площадь опоры и улучшают устойчивость
Результатом является сдвиг ЦТ вниз и вправо. Поскольку ЦТ теперь ниже, он теоретически более устойчив. Однако поскольку правая нога у него на весу, площадь опоры ограничена только левой стопой. Вместо того чтобы заставлять пациента смещать ЛТ влево, ему дают костыли. Костыли и левая нога образуют вместе значительную ПО, добавляя пациенту устойчивости и помогая избежать сильного компенсаторного сдвига веса влево. На рис. 2.13 человек держит в правой руке гирю (удерживая его на весу силой плечевого пояса).

Рис. 2.13. Сдвиг центра тяжести вверх и вправо. Вес гири, приходящийся на плечевой пояс, смещает ЦТ. Человек отклоняетсяв левую сторону, чтобы сместить ЛТ обратно, к центру площади опоры
Результат — сдвиг ЦТ вверх и вправо. Поскольку ЛТ смещается к правой ноге (и потенциально к внешней части правой стопы, если гиря весит достаточно), человек «компенсаторно» отклоняется влево. Небольшая реорганизация сегментов, связанная с отклонением туловища, слишком мала, чтобы сместить ЦТ. Эффект отклонения скорее в том, чтобы увести ЛТ от правой стопы ближе к середине площади опоры. Сегменты тела переориентированы в пространстве, но не для смещения ЦТ, а для того, чтобы держать ЛТ ближе к центру площади опоры.
2.3. Силы реакции
2.3.1. Закон реакции Ньютона При изучении источника и приложения сил следует рассматривать весьма важное свойство сил, которое заключается в том, что силы всегда действуют парами. Эта концепция отражена в третьем законе Ньютона, законе реакции. Обычная формулировка третьего закона Ньютона звучит следующим образом: «Сила действия равна противодействию». Это положение вводит в заблуждение, поскольку приводит к неправильной интерпретации, показанной на рис. 2.14.

Рис. 2.14. Третий закон Ньютона, который часто, но некорректно представляют при помощи двух векторов, действующих на один объект
К формулировке третьего закона Ньютона можно подойти более бережно: «Если один предмет воздействует с некой силой на второй предмет, второй предмет должен одновременно оказывать воздействие на первый предмет с силой, равной по величине и противоположной по направлению к первому предмету». Эти две силы двух контактирующих предметов представляют собой пару взаимодействия, или силы действия — реакции. Простоту закона Ньютона легче всего оценить, если мы вспомним, что сила, прилагаемая к предмету, всегда исходит из чего-то, соприкасающегося с предметом. Так, сила, прикладываемая к предмету (А), исходит из чего-либо, касающегося предмета (А) (например, руки). Естественно, если рука прикасается к предмету (А), то объект (А) тоже прикасается к руке точно с такой же силой. Мы уже установили, что силы, прикладываемые к предмету, исходят из чего-либо, касающегося этого предмета. Теперь мы можем эту концепцию расширить, сказав, что все, что касается предмета, воздействует на него с помощью силы. Если предмет (А) касается руки, он оказывает на нее усилие. Если все силы исходят от контакта, а все предметы, входящие в контакт, оказывают усилие, то два соприкасающихся предмета должны воздействовать друг на друга с помощью силы. Ньютон заметил этот феномен и пришел к выводу, что все силы действуют парами, равными по величине, противоположными по направлению и прилагаемыми к смежным соприкасающимся предметам. Связь пар «действие-реакция» с концепцией соприкасающихся объектов позволяет нам также отнести силы реакции к контактным силам. * * *
ПРИМЕР 1. На рис. 2.15 изображена книга, лежащая на столе. Сколько бы эти предметы ни находились в контакте, каждый будет оказывать действие на другой: книга действует с силой на стол, а стол действует с силой на книгу. Величины сил будут одинаковыми, а векторы — противоположными по направлению. Назовем силы условно: «книга на стол» (КС) и «стол на книгу» (СК). Вектор КС приложен к столу, и его источником является давление книги, направленное вниз, и равное, в данном случае, весу книги. Вектор СК приложен к книге и является результатом сопротивления стола на книгу, направленного вверх, с силой, равной КС. Силы КС и СК относятся к паре «действие-реакция» как силы реакции или контактные силы.

Рис. 2.15. Силы реакции опоры и «книга на стол» (КС) и «стол на книгу» (СК)
* * * Важно отметить, что в любой паре сил точки приложения находятся на разных предметах, но не на одном, как неправильно показано на рис. 2.14. На рис. 2.15 книга действует на стол, и стол одновременно действует на книгу. Пара взаимодействия или силы реакции в этом случае всегда будет носить противоположные имена. На рис. 2.3 векторы назывались «коробка на левую кисть» и «коробка на правую кисть». Поскольку силы действуют парами, а контактирующие предметы всегда действуют с силой друг на друга, мы должны иметь также две дополнительных силы, называемые «правая кисть на коробку» и «левая кисть на коробку». Каждый из этих векторов приложен к коробке и направлен вверх с величиной усилия в 1 кг. Поскольку сила тяжести в реальности на предмет не действует, то можно подумать, что реакция силы тяжести, или сила «земля на предмет», не имеет пары. Сила тяжести тоже должна иметь силу реакции. Земля притягивает все предметы, имеющие массу; аналогичным образом, все предметы тоже притягивают Землю с силой, равной по величине и противоположной по направлению. Поскольку притяжение Земли маленьким предметом представляется несравнимым с действием Земли на маленький предмет, силой действия «объект-Земля» обычно пренебрегают (она как бы не существует). Мы же можем продолжать считать, что на все, касающееся тела, оказывается сила реакции, т. е. имеется взаимодействующая пара. Когда объясняют силы, действующие на предмет или набор предметов, следует помнить, что: • силы, действующие на предмет, исходят от объектов, которые соприкасаются с этим предметом; • сила тяжести действует на все предметы; • каждый раз, когда предметы входят в контакт, они действуют друг на друга с силой (все силы действуют парами).
2.4. Равновесие
Основной проблемой при рассмотрении сил, действующих на предмет и, в частности, на тело, является эффект, оказываемый этими силами на предмет или тело. Находится ли предмет в состоянии поступательного, вращательного или криволинейного движения зависит от сил, действующих на этот предмет. Также возможно, что сила действует на предмет, не вызывая при этом его движения. Статика — это изучение условий, при которых предметы остаются в равновесии (в покое или в постоянном движении), и это состояние является результатом сил, действующих на них.
2.4.1. Закон инерции Ньютона Первый закон Ньютона, закон инерции, относится к предметам, находящимся в равновесии. Закон гласит, что предмет остается в состоянии покоя или постоянного движения, если на него не действует сила, выводящая его из равновесия. Постоянное движение происходит, когда предмет движется с постоянной скоростью. Если эта постоянная скорость равна нулю, предмет находится в состоянии покоя. Инерция является свойством предмета, который сопротивляется как началу движения, так и изменению движения. Скорость является векторной количественной характеристикой, обладающей как величиной, так и направлением. Соответственно, постоянная скорость — это движение с постоянной быстротой и в постоянном направлении. Скорость может быть линейной (при поступательном движении) или угловой (при вращательном движении). Если мы имеем дело с человеческим телом и его сегментами, то равновесие движения (или постоянная скорость) встречается нечасто. Таким образом, в рамках этой книги понятие равновесия можно упростить и говорить далее, что объект находится в покое, если только не вводятся дополнительные переменные. Закон инерции Ньютона (или закон равновесия) можно переформулировать. Для равновесия объекта сумма действующих на него сил должна быть равна 0 (ΣF = 0) или F1 = F2, либо сила воздействия (|F1|) должна быть по модулю равна силе противодействия (|F2|), т. е. (|F1|) = |F2|. Объект не может находиться в равновесии, если на него действует только одна сила, поскольку ей будет нечего противопоставить. Если сила существует, она имеет некую величину, и эта величина нулю равняться не может.
2.4.2. Определение равновесия предмета Используя то, что узнали, мы можем объяснять все силы, действующие на тело в состоянии покоя. На рис. 2.15 показана лежащая на столе книга. Допустим, что книга находится в равновесии (лежит на столе и находится в состоянии покоя). Теперь мы можем объяснить характер и величину всех действующих на книгу сил (заметим, что сейчас мы говорим о книге, но не о столе). 1. Сила тяжести воздействует на все предметы. Таким образом, сила тяжести должна действовать на книгу и ее ЦТ с величиной, пропорциональной массе книги, т. е. вектор ГК = силе тяжести книги. Поскольку предмет, на который действует всего одна сила, в равновесии быть не может, то на книгу должна действовать как минимум еще одна сила. 2. Как только происходит соприкосновение предметов, каждый из них действует на другой с некоторой силой. Книга находится в контакте со столом, соответственно стол должен воздействовать с силой на книгу противонаправленной, или силой сопротивления (противодействия) (СК = «стол-книга»). Как показано на рис. 2.16, книги больше ничто не касается, поэтому сил, которые можно было бы рассматривать, нет.

Рис. 2.16. Векторы равновесия: — «сила тяжести-книга»(ГК) и «стол-книга» (СК)
Поскольку векторы ГК и СК приложены к одному предмету и их линии действия лежат на одной прямой, ГК и СК являются частью линейной системы сил. Чтобы не путаться в рисунках, векторы с совпадающими точками приложения изображаются так, как будто они находятся рядом друг с другом. Линейная система сил существует всегда, когда две и более сил действуют на один и тот же предмет по одной линии. Если векторы продолжить, они накладываются друг на друга. Векторы, накладывающиеся друг на друга, но относящиеся к разным объектам, не могут быть частями одной и той же линейной системы. Поскольку линейные силы вызывают поступательное движение, величинам линейных СИЛ присвоены знаки, согласно правилам, ранее описанным для сил поступательного движения. Силы, действующие вверх или вправо, считаются положительными, силы, направленные вниз или влево, считаются отрицательными (в системе координат). Векторы противоположных направлений всегда должны иметь величины с противоположным знаком. Чистый эффект, или равнодействующую всех сил, являющихся частями линейной системы сил, можно определить, вычислив арифметическую сумму всех сил системы с учетом знака «+» или «-». Чтобы сумма сил «книга-стол» и «стол-книга» равнялась нулю, эти силы должны быть равны и противоположны по направлению. Если вес книги 1 кг, то ГК = -1 кг, соответственно величина вектора СК будет равна +1 кг. Таким образом, абсолютные значения сил равны: I -1 кг I = I +1 кг I. Теперь обратим внимание на стол на рис. 2.17.

Рис. 2.17. Силы, создающие равновесие стола: ГТ — «сила тяжести-стол»; КС — «книга-стол»; ПС = ПС1 + ПС2 + ПС3 + ПС4 — «пол-стол»; СП — «стол-пол» является силой реакции на ПС и непосредственного эффекта на равновесие стола не оказывает
Равновесие стола можно оценить аналогичным образом. На стол действует сила тяжести и книга. Сила тяжести, действующая на стол, направлена вниз (ГТ), равна весу стола и приложена к его ЦТ. Предположим, стол весит 9 кг. Соответственно, величина силы тяжести равна -9 кг. Поскольку стол в контакте с книгой, книга тоже в контакте со столом. Эти «контакты» равны по величине и противоположны по направлению, но приложены к разным объектам контакта (закон реакции). Таким образом, сила «книга-стол» равна по величине и противоположна по направлению вектору СК. Соответственно, КС должна быть -1 кг. Предположим, что изображенная на рис. 2.17 книга находится точно на середине стола. На стол теперь действуют две силы в одной точке и по одной линии (векторы СТ. и КС изображены раздельно, чтобы они не сливались друг с другом). «Сила тяжести стола» (СТ.) и «книга-стол» (КС) являются частями одной и той же линейной системы сил. Чистый эффект действия СТ. и КС на стол может быть представлен вектором, идущим от ЦС стола, равным по величине -10 кг. Стол не может находиться в равновесии, если на него действует только одна эта сила. Должна существовать, по меньшей мере, еще одна. Источником любой дополнительной силы, действующей на стол, должно быть нечто, находящееся со столом в контакте. Единственное, что может осуществлять контакт со столом на рис. 2.17 — пол. Так как любой контакт между двумя предметами должен создавать силу, то вектор, относящийся к столу, будет называться «пол-стол» (ПС). Если стол находится в состоянии покоя, сумма действующих на него сил должна быть равна нулю. Соответственно, ПС должна быть равна по величине и противоположна по направлению равнодействующей сил СТ. и КС. ПС по величине +10 кг. Точка ее приложения находится в центре тяжести стола, поскольку именно он является гипотетической точкой концентрации массы. Сила ПС может быть также приложена к реальным точкам контакта, т. е. к каждой из ножек стола. На рис. 2.17 показано распределение веса по четырем ножкам, чтобы избежать лишних линий на рис., но следует при этом понимать, что ПС можно рассматривать как силу, действующую в ЦС стола и, соответственно, как часть той же линейной системы сил, как СТ и КС (ПС = ПС4 + ПС2 + ПС3 + ПС4). * * *
ПРИМЕР 2. На рис. 2.18 на руку действуют три силы. Каждая из них должна иметь парную силу реакции, хотя для равновесия руки эта реакция особого значения не имеет. Силы реакции (пары взаимодействия).

Рис. 2.18. Линейная система сил, образованная действием силы тяжести на кисть (СТК), «кисть-гиря» (КГир) и предплечья на кисть (ПрК)
* * *

На рис. 2.17 есть еще один вектор силы. «Стол-пол» является реакцией на давление «пол-стол» (ПС). ТП должна существовать, поскольку сам факт контакта стола и пола требует, чтобы и стол, и пол действовали с силой друг на друга. ТП равна по величине и противоположна по направлению ПТ. Она тем не менее не оказывает непосредственного влияния на равновесие стола, потому что его равновесию могут способствовать только те силы, которые имеют точку приложения на объекте. Аналогичным образом силы «стол-книга» и сила тяжести книги, если показывать их в точном расположении, будут накладываться сила тяжести — стол и книга — стол. При всем совпадении эти векторы не являются частями одной и той же системы линейных сил, поскольку приложены они к разным объектам. На рис. 2.18 сегмент кисти человека, держащего гирю, находится в равновесии. На этот сегмент действует сила тяжести, собственно гиря, а также дистальный сегмент предплечья. Все векторы — ГК (сила тяжести кисти ГК («гиря-кисть») и ПрК («предплечье-кисть») действуют на кисть и имеют на ней совпадающие точки приложения и линии действия. Таким образом, они относятся к одной и той же системе линейных сил. Сила тяжести (ГК) и тяга гири (КГир) действуют в отрицательном направлении (вниз). Величина ГК равна собственному весу кисти (1 кг). Величину ПрК тоже несложно определить, если сначала посмотреть на гирю. Если гиря весит 3 кг («сила тяжести-гиря»), то тогда сила («кисть-гиря») должна равняться +3 кг, если только гиря больше ничего не касается, и она находится в равновесии. Если кисть тянет гирю вверх с силой +3 кг, то гиря тоже тянет кисть, но вниз, с силой -3 кг. Таким образом, величина ПрК равна -3 кг. Две направленные вниз силы (ПрК и ГК), если кисть находится в равновесии, уравновешены тягой, осуществляемой предплечьем вверх (ПрК), которая должна быть положительной по направлению и равна по величине сумме ГК + ПрК (+4 кг). Хотя справедливо, что силы, возникающие в результате контакта предметов, всегда являются парными и всегда действуют на соприкасающиеся и разные предметы, силой реакции на одном предмете всегда можно пренебречь, если она не создает проблем руке. На рис. 2.19 человек стоит на напольных весах с намерением измерить собственный вес, т. е. силу «гравитация-человек» (ГЧ).
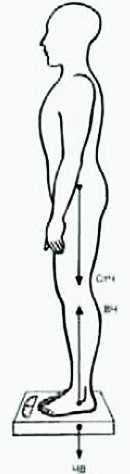
Рис. 2.19. Сила воздействия человека на весы. Хотя считается, что весы измеряют вес человека («сила тяжести-человек», СтЧ), на самом деле они регистрируют контакт «человек-весы» (ЧВ). Векторы СтЧ и ЧВ равны по величине, если человек не находится в контакте с чем-то еще
Естественно, весы измеряют не силу, действующую на человека, а силу, которая действует собственно на весы. На самом деле регистрируется сила воздействия человека на весы (ЧВ), весы измеряют вес человека (т. е. силу, с которой человек действует на весы). Вектор ЧВ всегда будет равным по величине и противоположным по направлению вектору силы реакции весов на человека (ВЧ). Когда человек находится в равновесии, и ничего не касается, величины сил действия человека на весы и гравитации на человека равны, соответственно величины ВЧ и ГЧ тоже будут равны. Разница между СтЧ и силой реакции ЧВ может оказаться очень значимой, если человек на весах касается еще чего-либо. Если взвешивающийся человек держит что-то, то его вес (СтЧ) не меняется, но контактные силы (ВЧ, ЧВ) увеличатся. Аналогичным образом все знакомы с феноменом, когда во время взвешивания в ванной легкое надавливание на стенку ванны вызывает уменьшение веса. Давление пальцев вниз вызывает реакцию стенки ванны вверх (СтЧ). Теперь, равнодействующая (-СтЧ) + (+СтЧ) дает сумму, меньшую, чем сама СтЧ. Контакт между человеком и стенкой ванны создал дополнительную силу реакции, действующую на человека и выражающуюся в мнимом уменьшении веса. Естественно, это не уменьшение СтЧ, а уменьшение ВЧ. Поскольку весы на самом деле измеряют не вес человека, а силу реакции «человек-весы», ЧВ будет равна СтЧ только в том случае, когда на человека не действуют какие-либо посторонние силы. В данном примере силу реакции (ЧВ) игнорировать нельзя, так как она является переменной, представляющей наибольший интерес.
2.5. Предметы в движении
Когда существует состояние равновесия, все силы, действующие на предмет, сбалансированы (сумма всех сил, действующих на предмет, равна нулю). Если на предмет действуют несбалансированные силы, объекту обязательно придается ускорение. На рис. 2.20 показаны три человека, тянущих веревку.

Рис. 2.20. Неуравновешенность сил, действующих на веревку, создает ускорение веревки в направлении человека С
Участники А и В тянут веревку, каждый с силой = 10 кг. Участник С развивает силу в = 21 кг в противоположном, или отрицательном направлении. Все силы действуют на один и тот же объект (веревка), по одной линии и, соответственно, являются частями одной линейной системы сил. Поскольку контакт с веревкой осуществляют только люди (незначительным действием силы тяжести можно пренебречь, так как веревка очень легкая), то равнодействующая сил, действующих на веревку, R = (+10 кг) + (+10 кг) + (-21 кг) = -1 кг. Чистый эффект воздействия на веревку равен 1 кг; он направлен в левую сторону и заставляет веревку двигаться с ускорением в этом направлении. Как только предмет начинает ускоряться, возникают новые силы, и кинетический анализ становится значительно сложнее. Мы будем придерживаться довольно простого (даже упрощенного) подхода, который не включает в себя более сложных понятий динамики.
2.5.1. Закон ускорения Ньютона Величина ускорения движущегося предмета определяется вторым законом Ньютона, или законом ускорения. Второй закон Ньютона гласит, что ускорение предмета пропорционально действующей на него неуравновешенной силе и обратно пропорционально массе предмета: a = F/m, т. е. если на предмет с постоянной массой (m) оказывается давление (F), то оно вызовет ускорение (а). Толчок (или давление), оказываемый на предмет с большой массой, вызовет меньшее ускорение, чем такое же давление, оказанное на предмет с меньшей массой. Акселерация может наблюдаться как изменение скорости объекта, как изменение направления его движения, или как оба явления одновременно. Из закона ускорения видно, что инерция, т. е. сопротивление, предмета попытке изменить его движение (ускорение) пропорциональна массе тела или предмета. Чем больше масса предмета, тем большая сила требуется для того, чтобы сдвинуть его или изменить характер движения. Очень крупная женщина в кресле-каталке обладает большей энергией, чем маленькая; для того чтобы придать креслу одинаковое ускорение, санитару придется приложить большее усилие, чтобы сдвинуть с места кресло с крупной женщиной, чем с маленькой. Примеры динамики. На рис. 2.21,а человек весом в 90 кг делает шаг вперед.

Рис. 2.21. Человек находится в равновесии. Силе тяжести (СТ), действующей на правую ногу и направленной вниз, противостоит равная и противоположно направленная сила «пол-нога» (ПН) (a) и человек не в равновесии, когда давление ПН не равно силе тяжести: соответственно, нога проваливается сквозь пол с ускорением (b)
В этот конкретный момент, изображенный на рисунке, примерно половина веса его 90-килограммового тела («сила тяжести-человек») действует вниз на его правую ногу. Правая нога в этот момент находится в равновесии, если есть другая сила, равная по величине и обратная по направлению, и действующая на ногу со стороны пола (опоры). Сила «пол-правая нога» (ПН) действует на ногу, и является результатом реакции пола на давление ноги (НП). Поскольку, кроме пола, с ногой и телом ничего не контактирует, ПН должна быть равной СТ по величине, т. е. примерно 45 кг. В принципе насколько велика СТ особого значения не имеет, поскольку пол реагирует на ногу точно с таким же усилием (мы всегда рассчитываем при ходьбе именно на это!). Однако на рис. 2.21,b сила ПН (и соответственно сила реакции НП) меньше (34 кг), чем СТ. Пол проваливается, и не может адекватно среагировать. Поскольку сумма СТ + ПН не равна нулю, нога человека в равновесии быть не может. Она ускоряется вниз через пол с несбалансированной силой в = 11 кгс. Величину ускорения ноги сквозь пол можно легко определить при помощи второго закона Ньютона, если задачу решают так, как будто человек находится в статичном положении, а не в динамике. Когда пол начинает проваливаться, сила, с которой он реагирует на ногу (ПН), будет уменьшаться, пока не достигнет нуля, постоянно изменяя несбалансированную силу, действующую на ногу, вплоть до этой точки. Проблему можно упростить, рассматривая только момент равновесия ПН и НП — 34 кгс. Ускорение ноги через пол можно найти при помощи формулы a = F/m. Нужно знать, как величину несбалансированной силы (11 кгс = 24,25 lb), так и массу ускоряющегося сегмента (половина массы тела, действующая на правую ногу). Направление (вниз, через пол) остается относительно неизменным, и для задач расчета им можно пренебречь. Вес тела (или сила, действующая через правую ногу) — 45 кг. Единицу силы можно перевести из килограмм в единицы массы (0,45 кг = У32 слага), соответственно 45 кг = 3 слага. Слаг можно также выразить как lb х s2/ft. Таким образом: a = 24,25 lb/3 lb х s2/ft, a = 8 ft/s2. Расчетное ускорение в 2,44 м/с2 будет наблюдаться только в момент, когда проламывается пол. Когда пол начинает оказывать меньшее сопротивление, величина ПН уменьшается. По мере уменьшения ПН возрастает чистая несбалансированная сила, направленная вниз, равно как и ускорение. Ускорение будет возрастать, пока пол не оказывает хоть какого-то действия на ногу, или, что более вероятно, пока не возникнет новая сила (например, нога встретится с черным полом), которая восстановит равновесие ноги. Создание статической ситуации при помощи фиксации какого-либо изолированного момента упрощает анализ. Однако чрезмерное упрощение может приводить к неправильным выводам. На рис. 2.22 показан таз человека, лежащего на столе, и между тазом и столом — кожа ягодиц.

Рис. 2.22. Таз не находится в равновесии, поскольку «сила тяжести таза» (СТ) больше, чем «кожа-таз» (КТ). Кожа остается в равновесии, пока сумма векторов «сила тяжести-кожа» (СтК), «таз-кожа» (ТК) и «стол-кожа» (СК)равняется нулю. В этом случае таз «ускоряется» вниз через кожу, создавая пролежень
На таз воздействует сила тяжести таза, он также находится в контакте с кожей («кожа-таз», или КТ). На кожу также действует сила тяжести («сила тяжести-кожа», СК), и она находится в контакте со столом («стол-кожа», СК) и тазом («таз-кожа», ТК). Если все находится в равновесии, то СТ = КТ и СК + ТК = СК. Возможно, однако, что способность кожи «отталкивать» таз нарушена, например, за счет плохого питания. Если способность кожи ограничена, то величина КТ будет немного меньше, чем СТ. В этом случае возникает чистая неуравновешенная сила, действующая на таз и вызывающая его ускорение вниз. Правда, в силу того что сила эта очень мала, ускорение также будет почти незаметным. Кожа при этом двигаться вниз вместе с тазом не будет. Если величина ТК слегка уменьшается (как было бы, если бы уменьшилась величина КТ), то уменьшается и величина СК, т. е. чем меньше чистая направленная вниз сила, действующая на кожу, тем меньше будет контакт между кожей и столом. Результатом этого будет медленное ускорение таза вниз, через кожу, притом, что кожа остается на месте. Именно таким образом и возникают пролежни. Статический анализ замаскировал то, что было на самом деле прогрессирующей динамической ситуацией. Как мы только что увидели, анализ линейных сил, исходя из мнимо существующего равновесия (статика), может вести к неточностям. Как только возникает ускорение, на арену выходят новые силы, которыми мы до этого пренебрегали. Аналогичным образом угловое ускорение костного рычага, вращающегося вокруг суставной оси, также создает новые силы, которые усложняют анализ и выводят его далеко за рамки того, что мы можем охватить в такой базовой биомеханической единице. Сегмент может вращаться вокруг оси с постоянной скоростью (углы в единицу времени). Хотя величина угловой скорости сегмента может быть постоянной, направление таким не будет никогда. Векторы направления угловой скорости (V1 и V2) всегда будут располагаться по касательной к дуге движения (или перпендикулярно движущемуся сегменту), как это показано на рис. 2.23.

Рис. 2.23. Хотя величина угловой скорости (V1, V2) может быть постоянной, направление угловой скорости вращающегося сегмента конечности меняется по мере продвижения конечности вокруг оси. Угловая скорость всегда направлена по касательной к дуге движения
Постоянно меняющийся вектор угловой скорости, если не принимать его во внимание, может сделать анализ неточным. Когда момент вращения (количество вращения объекта) будет обсуждаться позже (параграф 2.8. п. 2.8.1), мы еще раз напомним читателю, что простой статический анализ приводит к недооценке сил, действующих на рассматриваемый нами рычаг.
2.5.2. Расхождение сустава в линейной системе сил Знание принципов законов Ньютона и линейных систем сил может использоваться для того, чтобы понять, как скелетная тяга вызывает расхождение сустава. На рис. 2.24 показана тяга, приложенная к ноге. Мы покажем, как подвешивание 4,5-килограммового груза к этой системе блока вызывает расхождение большой берцовой кости и бедренной кости в коленном суставе. Внимательно следим за каждой силой так, как они будут описаны.

Рис. 2.24. Тяга стопы, создающая несколько сил, результатом чего является расхождение в коленном суставе: СвК — связки колена; СтН — сила тяжесть ноги
Начнем с предположения, что предметы на рис. 2.24 находятся в равновесии. Так как мы выбрали 4,5-килограммовый вес, подвешенный на веревке, мы знаем, что на него действует сила тяжести (СТ) равная -4,5 кг и направленная вниз. Чтобы вес находился в равновесии, на груз должна действовать сила, равная +4,5 кг, исходящая откуда-либо и находящаяся в контакте с весом. Поскольку единственным предметом, касающимся груза, является веревка, то это должна быть сила в +4,5 кг, «веревка-груз» (ВГ). ВГ должна иметь силу реакции «груз-веревка» (ГВ), равную по величине и противоположную по направлению ВГ (-4,5 кг). Предположим, что у нас имеется система блока без трения, натяжение веревки в которой равномерно по всей ее длине, т. е. сила, действующая на каждом конце веревки, одинакова. Поскольку ГВ представляет собой тягу веса, или натяжение (Т4) вертикального сегмента веревки, равный вектор натяжения (Т2) должен иметься на другом ее конце. Для того чтобы создать натяжение на обоих концах веревки, Т2 должен быть приложен в направлении, противоположном Тг Если учесть, что блок изменяет направление действия силы, Т2 в этом случае является горизонтальным и направлен влево (с силой в 4,5 кг). Если бы веревка не «огибала» блок, то Т4 и Т2 были бы прямо противоположными. Поскольку мы знаем, что Т2 существует, мы должны идентифицировать ее по имени. Сила Т2 должна исходить из чего-либо, что находится в контакте с горизонтальным сегментом веревки. Как петля, так и блок может только «тянуть» веревку («толчок» веревки вызовет только ее провисание). Так как тяга всегда направлена к ее источнику, то тягу влево может осуществлять только петля. Для упрощения мы будем рассматривать петлю и ногу, как один жесткий объект, называемый ногой. Соответственно Т2 должна называться «нога-веревка» (НВ) и иметь, как и вектор Т2, величину в -4,5 кг. «Нога-веревка» имеет парную силу реакции «веревка-нога» (ВН), действующую на ногу с величиной в +4,5 кг. Голень со стопой находится в контакте с силой тяжести (СТ), связками колена и веревкой. Силу, развиваемую веревкой, мы уже распознали. Вектор СТ направлен вниз и не находится в одной линии с ВН. Вектор СТ не является частью линейной системы сил вместе с ВН, и им можно пренебречь. Мы будем рассматривать только горизонтальные силы, действующие на ногу и бедренную кость, которые мы стараемся разделить. Вектор «связки колена-нога» (Св. Н) потенциально может тянуть ногу, создавая силу, направленную влево, которая является частью одной линейной системы с ВН (хотя суставная капсула также является частью связочной силы, действующей на ногу, здесь, для простоты, будут рассматриваться только связки). Если чистым эффектом действия двух сил (Св. Н) и ВН является отсутствие движения (равновесие), силы уравновешены и в сумме дают ноль. Таким образом, величина (Св. Н) должна быть -4,5 кг. Вектор (Св. Н) должен иметь силу реакции; нога должна действовать с равной и противоположной по направлению силой (+4,5 кг) на связки, «нога-связки» (Н.Св). Чтобы связки находились в равновесии, бедро должно действовать на них с силой «бедро-связки», равной -4,5 кг (Б.Св), поскольку бедро — единственный предмет, контактирующий со связками (мы снова пренебрегаем вертикальным воздействием силы тяжести на связки). (Б.Св)имеет силу реакции, «связки-бедро» (Св. Б), равную +4,5 кг. Если предположить, что бедро находится в равновесии, без проверки сил, действующих на него, то все мы определили все силы, вызывающие расхождение сустава. Равновесие каждого предмета, идентифицированного на рис. 2.24, зависит от способности предмета генерировать требуемую силу (способность толкать или тянуть так, чтобы уравновешивать силы). В случае с подвешенным грузом, веревкой и ногой каждый из элементов способен развивать требуемую силу в 4,5 кг, если только не возникает каких-либо дефектов. Однако связки не могут действовать со значительной силой на ногу, если они находятся в провисшем состоянии. На самом деле в момент подвешивания груза к системе они будут именно в таком состоянии, поскольку нога и бедренная кость — близко друг к другу (цель тяги как раз в том и состоит, чтобы их разделить). Вначале сила (Св. Н и Н.Св) может быть всего 0,45 кг, и на ногу будет действовать чистая сила в 4,5 кг, направленная вправо (тяга веревки не будет полностью уравновешиваться связками ноги). Поскольку на ногу действует неуравновешенная сила, нога ускоряется вправо. По мере того как нога сдвигается вправо, и кости расходятся, натяжение связок увеличивается. Чем больше натягиваются связки, тем меньше становится неуравновешенная сила, и, соответственно, ускорение. Как только за счет движения ноги связки растягиваются до предела, они становятся способны действовать с силой в 4,5 кг, необходимой для поддержания ноги в равновесии. Связки обладают огромной силой натяжения и способны выдерживать большие нагрузки, чем те, которые создаются в данном примере, по крайней мере, в течение короткого времени. Пример с расхождением сустава, созданным за счет ускорения ноги вправо, т. е. от сустава, является образцом чистого поступательного движения без сопутствующего вращения сустава. Это также пример того, насколько важными могут оказаться даже маленькие неуравновешенные силы. Равновесие ноги теперь установилось в положении, в котором связки натянуты, и поверхности суставов разошлись настолько, насколько позволяет длина связок. Отметим, что в данном примере мышцы, проходящие у коленного сустава, были предположительно неактивны, и мышечные усилия не учитывались. В случае перелома кости процесс растягивания костных обломков, требуемый для правильной их репозиции (или сопоставления) и лечения, аналогичен тому, который рассматривался для расхождения сустава. Перелом ведет себя как ложный сустав, и сопротивление растягиванию оказывается мышцами, проходящими у места перелома. Гиперактивность этих мышц ускоряет дистальный фрагмент в направлении проксимального отдела. Для выравнивания костей применяют вытягивание. По мере затихания мышечного спазма и нарастания утомления мускулатуры, мышцы действуют все с меньшей и меньшей силой. В конце концов сила тяги веревки, прилагаемая к дистальному обломку, превышает силу действия мышц на него, и направление движения меняется, что позволяет развести и выровнять обломки костей. Равновесие восстанавливается, когда структуры, проходящие через зону перелома, снова натягиваются. В примере с вытяжением ноги мы пренебрегли действием силы тяжести на ногу и связки, говоря, что вертикальные силы не были частью одной и той же линейной системы сил растяжения и таким образом, при расчете величин этих сил ими можно было пренебречь. Фактически в первый закон Ньютона, закон равновесия, можно внести следующее усовершенствование: • чтобы объект находился в равновесии, сумма всех вертикальных сил, действующих на него, должна быть равна нулю, и, независимо от этого сумма всех горизонтальных сил должна также быть равна нулю: ΣFv = 0; ΣFн = 0. Мы объяснили суммарное действие горизонтальных сил, но пренебрегли суммой сил вертикальных. Идентифицировав только гравитационные вертикальные силы (направленные вертикально вниз), мы не учитывали вертикальное ускорение ноги в примере с тягой. Даже если мы правильно пренебрегли совершенно незначительным весом веревки, то действие силы тяжести на ногу рассматривать все же следует. Мы могли компенсировать GL за счет положения ноги на постели (что создает контактную направленную вверх силу «постель-нога»), а могли потенциально ввести и новую силу, силу трения.
2.6. Сила трения
Сила трения (FN) потенциально существует при любом контакте двух предметов. Результатом контакта являются силы реакции, действующие на каждый из двух соприкасающихся предметов. Чтобы сила трения обладала размерностью (величиной), необходима какая-то еще одна сила, перемещающая или пытающаяся переместить один предмет по другому. Такая сила известна под названием «сила смещения». По определению, сила смещения (компонент силы) — это такая сила, которая действует параллельно контактным поверхностям в направлении движения, или его попытки. Величина силы трения — это функция силы контакта между предметами, в зависимости от гладкости или шероховатости контактных поверхностей, и если предметы не двигаются, величины собственно силы сдвига. Когда два контактируемых предмета не движутся, но на один предмет действует сила смещения, которая пытается сместить предмет по другому, находящемуся ниже, то величина силы трения равна силе сдвига. Сила трения в этом случае называется силой трения покоя. Максимальная сила трения равна силе трения скольжения. Таким образом, FN <= μs∙N. Коэффициент трения покоя есть величина постоянная для данного данного контакта предметов. Например, μs трения льда по льду примерно 0,05, μs трения дерева по дереву — примерно 0,25. Чем мягче и грубее трущиеся поверхности, тем выше μs. Сила реакции трения покоя (N) увеличивается вместе с силой контакта смежных объектов. Чем больше сила контакта и грубее соприкасающиеся поверхности, тем выше максимальная потенциальная сила трения. Когда мы трем руки друг о друга, чтобы согреть их, то согреваются обе ладони (силы трения существуют как для правой, так и для левой руки). Если мы хотим увеличить трение, мы при трении прижимаем ладони друг к другу сильнее (увеличиваем силу контакта). С увеличением давления возрастает сила контакта между ладонями и увеличивает максимальное значение силы трения (коэффициент трения остается тем же, поскольку кожа трется о кожу). Трение рассматривается как максимальная потенциальная сила, потому что ее величина проявляется только при «активации», т. е. попытке двигать один предмет по другому. На рис. 2.25,а большой ящик, весящий 100 кг, стоит на полу.

Рис. 2.25. На ящик действуют сила тяжести (СТ) и «пол-ящик» (ПЯ). Сила трения не существует, поскольку на данный момент не имеет размерности (a). Сила человека, толкающего ящик (ЧЯ), создает противодействующую силу трения (FN) (b)
Оценивая равновесие ящика, его максимальная потенциальная сила трения (FN) является произведением коэффициента трения покоя деревянного ящика по деревянному полу (0,25) и силы контакта или реакции «пол-ящик» (ПЯ) в 100 кг: FN <= 0,25 х 100; FN <= 25 кг. Если никакие другие силы на ящик не действуют, то трение отсутствует. Однако если в направлении влево прикладывается внешняя движущая сила (человек толкает ящик), величина трения увеличивается, чтобы уравновесить или противостоять величине силы сдвига (рис. 2.25,b). В этом случае трение может увеличиваться только до силы в 25 кг, направленной вправо; сила сдвига, превышающая 25 кг, вызовет ускорение ящика влево, поскольку влево уже будет направлена абсолютная величина неуравновешенной силы. Заметим, что на горизонтальное равновесие ящика влияют только силы, действующие на него горизонтально. Когда объект приходит в движение, трение между двумя объектами становится величиной постоянной, равной произведению силы реакции и коэффициента кинетического трения (μK). Коэффициент кинетического трения меньше, чем максимальная величина трения покоя при любых сочетаниях трущихся поверхностей. Сила сдвига, пытающаяся переместить предмет, должна быть большей, чем максимальное значение статического трения, тогда движение начнется (в направлении движения должна быть приложена хотя бы небольшая неуравновешенная сила). Однако после начала движения величина трения падает с максимального потенциального значения до минимального кинетического значения, что резко увеличивает абсолютное значение неуравновешенной равнодействующей, даже если внешняя сила сдвига не меняется. Резкое уменьшение величины трения приводит к классической ситуации, когда человек толкает тяжелый предмет все сильнее и сильнее, пытаясь сдвинуть его с места, и внезапно обнаруживает, что они с ящиком уже куда-то летят. Опять же, обращая внимание на более тщательную формулировку закона равновесия Ньютона, заметим, что ящик, который толкают по полу, не находится в горизонтальном равновесии, но сохраняет равновесие вертикальное (СТ и ПЯ уравновешены). Не следует при этом допускать, что вертикальное и горизонтальное равновесие обязательно сопутствуют друг другу: • трение может возникать при соприкосновении двух предметов; • трение начинает обладать величиной, только когда на предмет воздействует сила смещения; • силы трения (как и все силы) являются парными, действуют на каждый из находящихся в контакте предметов, равны по величине и противоположны по направлению; • линия действия силы трения всегда параллельна поверхностям контакта; • направление силы трения предмета всегда противоположно направлению потенциального или относительного движения предметов; • сила трения и соответствующая сила смещения, действующие на предмет, составляют одну и ту же линейную систему сил. В примере с ногой на вытяжке (см. рис. 2.24), если бы нога спокойно лежала на постели, то можно было бы добавить вертикальную контактную силу («постель-нога»), которая противостояла бы силе тяжести (СТ), но при этом следовало бы добавить и потенциальную силу трения. Потенциальная сила трения была бы параллельна контактным поверхностям (ноге и постели) и была бы горизонтальной силой, действующей в направлении, противоположном потенциальному движению голени от бедренной кости, т. е. «трение-нога» была бы противоположна силе сдвига, пытающейся сдвинуть ногу на постели (ВН). Максимальная величина силы трения, действующей на ногу (FXL), — произведение силы контакта «постель-нога» и неизвестного коэффициента статического трения. В этом примере она была бы довольно велика, потому что кожа и простыня легко скользить друг по другу не могут. Мы можем допускать даже, что FXL настолько велика, что может полностью нейтрализовать силу смещения «веревка-нога». Нога не могла бы двигаться в силу отсутствия чистой неуравновешенной силы, действующей на нее. Расхождения голени и бедренной кости не произошло бы, а связки остались в защитном напряжении.
2.7. Системы пересекающихся сил
Когда мы рассматривали силы равновесия и парные силы реакции, то эти силы были частями линейной системы сил, действующих на предмет. Однако гораздо чаще силы, действующие на предмет, не лежат на одной линии, а имеют линии действия, расположенные друг к другу под углом. Две или более силы, действующие в одной точке приложения на предмете, но врасходящихся направлениях, являются частями системы сходящихся сил, действующие на один предмет, могут также быть частью такой системы сходящихся сил, если их векторы имеют разные точки приложения на предмете, но если векторы продолжить, они пересекутся. Равнодействующая сходящихся сил (чистый эффект) действует в общей точке приложения или в точке пересечения и может быть представлена новым одиночным вектором при помощи процесса, известного как сложение сил.
2.7.1. Сложение сил На рис. 2.26 лошади (А и Б) тянут веревки, прикрепленные к блоку, под прямым углом друг к другу, каждый с силой в 34 кг.

Рис. 2.26. Лошади А и Б, тянущие блок через ЦТ под углом друг к другу, представляют собой систему сходящихся сил; вставка показывает сложение силы А (ЛАБ) и Б (ЛББ) для получения равнодействующей R
Линии действия «лошадь А-блок» (ЛАБ) и «лошадь Б — блок» (ЛББ) идут в разных направлениях, но обе действуют через ЦТ (поскольку векторы можно продолжить, веревки не обязательно прикреплять именно к ЦТ блока). Чистым эффектом, или равнодействующей этих двух сил тяги, будет линия, находящаяся между людьми. На вставке рис. 2.26 показано графическое решение задачи методом многоугольника. Векторы (ЛАБ) и ЛББ проводят в масштабе с общей точкой приложения под прямым углом друг к другу. Затем от конца вектора ЛББ проводится линия (ЛАБД параллельная ЛАБ, точно так же от конца вектора ЛАБ проводят линию (ЛББ4), параллельную ЛББ. В результате получается многоугольник. Равнодействующая R проводится от точки приложении в пересечении ЛАБ и ЛББ и до точки пересечения (ЛАБ4) и (ЛББ4). Вектор равнодействующей всегда будет являться диагональю многоугольника, образованного двумя исходными векторами. Чистый эффект сил ЛАБ и ЛББ (по 34 кг каждая) будет равен 48 кг в направлении R (учитывая пропорциональный размер R относительно ЛАБ и ЛББ). Важно заметить, что величина R не равна арифметической сумме ЛАБ и ЛББ. Блок легче сдвинуть, если в направлении R действует единая сила, равная 48 кг, чем две расходящиеся силы по 34 кг каждая.
2.7.2. Линии действия мышц Общий вектор мышечной силы. Сила, с которой мышца действует на костный сегмент, на самом деле является равнодействующей тяги, приложенной к общей точке прикрепления всех волокон, которые составляют мышцу. Поскольку каждое мышечное волокно может быть представлено в виде вектора (рис. 2.27), все волокна вместе составляют систему сходящихся сил, в которой равнодействующей будет общий вектор силы мышцы (ОСм).

Рис. 2.27. Общая сила мышцы (ОСм) является равнодействующей тяг всех волокон вместе
ОСм имеет точку приложения в месте прикрепления мышцы, линия действия его представляет направление равнодействующей тяги всех мышечных волокон. Можно попробовать представить это решение графически, взяв вначале тягу двух волокон, связав их в один пучок, и добавив еще одно волокно. Это можно повторять, пока не будут «подключены» все волокна. Равнодействующую тоже можно вывести в одну точку приложения в месте прикрепления мышцы на кости и проведя линию равнодействующей силы симметрично между волокон. Направление тяги любой мышцы будет всегда направлено к ее середине. Величина (длина) ОСм может быть изображена произвольно, если только не установлена гипотетическая размерность. Однако реальную силу активной тяги, как отдельных мышечных волокон, так и силу мышцы в целом, у живого человека определить невозможно. Всякий раз, когда мышца развивает усилие, она тянет за оба своих конца. Таким образом, каждая мышца создает как минимум два силовых вектора, по одному к каждой из костей, к которой эта мышца прикрепляется. Движение, вызываемое мышцей, зависит от абсолютных величин сил, действующих на каждый из рычагов, а не от таких условных наименований, как «начало» или «место прикрепления» мышцы. Когда мы анализируем движение, обычно стараемся ограничить анализ только одним из сегментов, на которые воздействует мышца. Хотя мы вправе так поступать, нам следует понимать также, что мы целенаправленно пренебрегаем силами, действующими на один или несколько других сегментов. Например, если рассматривается сгибание предплечья в локтевом суставе, следует учитывать все силы (внешние и внутренние), действующие на предплечье. Хотя мышцы, воздействующие на предплечье, действуют еще как минимум на один сегмент, действие их на этот сегмент (к примеру, плечевую кость или лопатку) можно игнорировать, пока мы не начнем рассматривать именно этот сегмент. Итак, выделим два основных момента: • если возникает мышечное усилие, мышцы воздействуют силой натяжения на все сегменты, к которым они прикрепляются; • мышцы вызывают движение, основанное на абсолютных величинах сил, действующих на каждый из их сегментов, и не основанное на так называемом «начале» и «месте прикрепления». Дивергентная тяга мышц. Концепцию системы сходящихся сил можно использовать для определения равнодействующей двух и более сегментов мышцы, или двух мышц, имеющих общее прикрепление. На рис. 2.28 показана равнодействующая сила передней части дельтовидной мышцы (ПДМ) и равнодействующая задней части дельтовидной мышцы (ЗДМ) на плечевую кость.

Рис. 2.28. Тяги передней дельтовидной (ПДМ), средней дельтовидной (СДМ) и задней дельтовидной (ЗДМ) образуют систему сходящихся сил с равнодействующей ОСм, получаемой при помощи сложения сил: ПДМ + ЗДМ = R; R + СДМ = ОСм
Используя метод многоугольника для сложения сил, получаем вектор равнодействующей R (см. вставку на рис. 2.28). Этот вектор представляет собой суммарное действие ПДМ и ЗДМ. В дельтовидную мышцу входит еще средний сегмент (СДМ), расположенный между передним и задним сегментами. Поскольку векторы R и СДМ совпадают и имеют общую точку приложения, они составляют одну линейную систему сил. Равнодействующая линейной системы сил находится путем простого арифметического сложения векторов R и СДМ, т. е. новый вектор равнодействующей ОСм будет по величине равен R + СДМ и будет направлен в ту же сторону. Вектор ОСм представляет собой общую тягу всех трех сегментов дельтовидной мышцы, которая при действии на плечевую кость вызывает отведение плеча. На рис. 2.29 показан еще один пример сложения сил для нахождения общей мышечной тяги.

Рис. 2.29. Нахождение общей мышечной тяги (ОСм) путем сложения сил ключичной порции большой грудной мышцы (КПМ) и ее грудинной порции большой грудной мышцы (СПМ)
В этом случае равнодействующая ключичной порции большой грудной мышцы (КПМ) и равнодействующая ее грудинной части (СПМ) показаны с общим прикреплением к плечевой кости. При одновременном сокращении обеих частей большой грудной мышцы возникает равнодействующая сил ОСм, действующая на плечевую кость. ОСм направлен в другую сторону и вызывает приведение и медиальную ротацию плечевой кости. Анатомические блоки. Часто мышечные волокна или сухожилия огибают кость или отклоняются от направления костным выступом. Когда направление тяги мышцы изменяется, то вызывающие эти отклонения кости или костные выступы называют анатомическими блоками. Блоки изменяют направление, не изменяя величины и размерности действующей силы. На рис. 2.30 слева показано схематическое изображение плеча, которое является связующим звеном между двумя прямыми рычагами.

Рис. 2.30.Линия действия дельтовидной мышцы на схематическом ключицы и плечевой кости (слева). Данная линия отклоняется костными выступами, образующими анатомические блоки (справа)
Вектор силы дельтовидной мышцы (ОСм), вызывающий отведение плеча, проведен так, как он мог бы выглядеть в этой гипотетической ситуации. На правой части рисунка показано анатомическое представление плеча, включающее в себя закругленную головку плечевой кости и акромион с ключицей. Эти анатомические особенности изменяют направление волокон дельтовидной мышцы. Если провести вектор ОСм, точка приложения будет также расположена на плечевой кости. Линия действия мышцы в этой точке прикрепления идет в направлении тяги. В данном примере линия действия соответствует тяге волокон средней части дельтовидной мышцы (вспомним, что равнодействующая направлена на отведение плечевой кости и находится в одной линии с вектором средней части дельтовидной мышцы). Линия действия дельтовидной мышцы продолжается по прямой, хотя мышца огибает головку плечевой кости, поскольку вектор — это всегда прямая линия, т. е. действие мышцы на кость определяется направлением мышечной тяги в точке прикрепления к кости, но не последующими изменениями направления волокон. Линия действия и направление ОСм значительно различаются на правой и левой части рис. 2.30, хотя точка приложения и величина силы везде одинаковы. Поскольку мышцы в теле постоянно сталкиваются с анатомическими блоками, тягу мышцы (ОСм) можно зрительно представить для любой мышцы или мышечного сегмента, соблюдая следующее: • точка приложения находится на рассматриваемом сегменте, в точке прикрепления мышцы к данному сегменту; • линия действия мышцы совпадает с направлением натяжения, которое волокна или сухожилия мышцы создают в точке приложения силы; • векторы являются прямыми линиями и не меняют направление, независимо от направления мышечных волокон или сухожилий; • величина (длина) мышечных векторов, если только им не придано некое гипотетическое значение, обычно берется произвольно, поскольку мы не можем измерить абсолютную силу мышечной тяги у большинства живых субъектов.
2.8. Системы параллельных сил
Силы, изученные выше, имели линии действия, совпадающие или пересекающиеся. Однако на рычаги в теле человека действуют также и силы с линиями действия, которые и не совпадают, и не пересекаются. Довольно несложно обнаружить в теле человека силы, действующие на один и тот же объект и параллельные друг другу. Система параллельных сил существует, если на один и тот же рычаг действуют две или более параллельно направленные силы, но действуют они на некотором расстоянии от оси, вокруг которой этот рычаг вращается. Каждая из сил в параллельной системе будет пытаться вызвать вращение рычага вокруг оси. Для лучшего понимания действия, которое параллельные силы оказывают на жесткие рычаги скелета, нам следует вспомнить принципы действия рычага.
2.8.1. Рычаги первого, второго, третьего рода. Вращающий момент Рычаги первого рода. Система рычагов первого рода возникает тогда, когда две параллельные силы (или две параллельные равнодействующие) действуют по сторонам от оси, вызывая (или пытаясь вызвать) вращение рычага в противоположных направлениях. Как правило, в качестве примера рычага первого рода, на который воздействуют силы, приводятся детские качели (рис. 2.31,а). На рычаг, или качели, действуют четыре силы (поскольку в контакте с ним находятся четыре вещи). Это контакты человека A, человека B, клина и силы тяжести.

На рис. 2.31,b показано схематическое изображение рычага и сил, действующих на него.

Рис. 2.31. Рычаг первого рода: детские качели (a). В контакте с рычагом находятся люди A и B, сила тяжести (СТ) и клин (КК), который служит осью (b)
Силы «клин-качели» (КК) и «сила тяжести-качели» (СТК) действуют на ЦТ качелей и входят в линейную систему сил. Поскольку эти силы не удалены друг от друга (они составляют линейную систему сил), или не удалены от оси (клина). Мы будем при движении их игнорировать, и сосредоточим внимание на векторах A и В. На рис. 2.32 показаны качели и те же силы, но только они обозначены не так, как на рис. 2.31,b.

Рис. 2.32. Система рычага первого рода: УП — усилие, действующее на расстоянии ПУ (плечо усилия) от оси; R — сопротивление, действующее на расстоянии ПС (плечо сопротивления) от оси
Сила B называется усилием (У). Она определяется как сила, вызывающая вращение рычага. Сила A обозначается как сила сопротивления (R). Сила сопротивления — это сила, которая препятствует вращению рычага (действует в направлении, противоположном вращению). Понятно, что это предполагает, что вращение рычага вызывается человеком B, т. е. качели идут вниз со стороны человека B. Если качели находятся в равновесии, то выбор силы, которую обозначают как усилие, и которую обозначают как сопротивление, может быть произвольным. Если равновесия нет (рычаг вращается), то вращение рычага всегда происходит в направлении действия усилия, или если формулировать точнее, усилие — это сила, осуществляющая тягу в направлении движения. Плечо рычага (ПР) в системе параллельных сил — это расстояние от оси до точки приложения силы к рычагу. Термин «плечо рычага» используется в этой книге для того, чтобы описать, насколько далеко от оси действует сила; к собственно длине рычага он отношения не имеет. Под плечом усилия (ПУ) подразумевается расстояние от места приложения усилия до оси. Аналогичным образом, плечо сопротивления (ПС) — это расстояние от точки приложения силы сопротивления до оси (см. рис. 2.32). В рычаге первого рода ПУ может быть больше, меньше, или равно ПС (рис. 2.33), поскольку ось может находиться в любом месте между усилием и сопротивлением, при этом классификация рычага не изменяется.
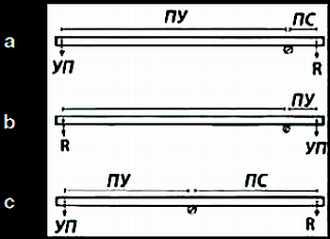
Рис. 2.33. В системе рычага первого рода ПУ может быть: а — больше, чем RA; b — меньше ПС; c — равно ПС
В теле человека довольно немного рычагов первого рода. На рис. 2.34 показаны две параллельные силы, действующие на рычаг предплечья: первая — это сила, с которой трицепс действует на локтевой отросток и вызывает ротацию по часовой стрелке, а вторая — это равнодействующая внешняя сила, толкающая предплечье вверх, против часовой стрелки.

Рис. 2.34. Рычаг первого рода в теле человека. Сила трехглавой мышцы плеча, действующая на локтевой отросток локтевой кости, и внешняя сила, действующая на локтевую кость, разделены осью (А)
Это является рычагом первого рода, независимо от того, какую из сил мы будем обозначать как усилие, а какую — как сопротивление, потому что ось находится между двумя силами. Если предплечье разгибается, то трехглавая мышца плеча будет оказывать усилие. Если внешняя сила преодолевает силу трицепса, и предплечье сгибается, то усилие будет оказывать внешняя сила. Рычаги второго рода. Рычаги второго рода возникают, когда две параллельные силы (или параллельные равнодействующие) действуют на некотором расстоянии от оси, причем сила сопротивления действует на точку, расположенную к оси ближе, чем точка приложения усилия (рис. 2.35).

Рис. 2.35. Система рычага второго рода. Плечо усилия (ПУ) всегда больше, чем плечо сопротивления (ПС)
В рычаге второго рода ПУ всегда длиннее, чем ПС. Рычаги второго рода в теле человека часто наблюдаются, когда усилием является сила тяжести, а сопротивление оказывается мышцами. Есть также примеры рычагов второго рода, в которых усилие развивается мышцами, но при этом дистальный сегмент, к которому прикрепляется мышца, несет вес тела. Результатом является движение проксимального, а не дистального рычага. На рис. 2.36 показано действие икроножного трицепса.

Рис. 2.36. При активном сокращении икроножного трицепса (ОСм) вес тела поднимается вокруг плюснефаланговой (МТР — метатарзофаланговой) оси пальцев ног. Сила ОСм (УП) и сила тяжести (R) действуют как рычаг второго рода; осью (А) при этом являются плюснефаланговые суставы
Суперпозиционный вес тела, действующий на стопу через ЛСТ, является сопротивлением (R). Поскольку мышцы совершают усилие, а вес тела оказывает сопротивление, образуется рычаг второго рода. Примеров рычага второго рода в теле человека, при котором усилие оказывают мышцы и вызывают движение длинного плеча с преодолением сопротивления силы тяжести, в человеческом теле не обнаруживается. В таком случае точка приложения действия мышцы должна находиться дальше от оси, чем смещенный ЦТ конечности. Мышцы с прикреплениями, которые удовлетворяли бы этому требованию, в организме нет. Соответственно, рычаги второго рода встречаются в теле либо при эксцентрическом сокращении мышцы против действующей внешней силы, либо при таких обстоятельствах, когда мышца воздействует на проксимальный сегмент при фиксированном дистальном сегменте. Рычаги третьего рода. Рычаг третьего рода возникает тогда, когда две параллельные силы (или компоненты параллельных сил) действуют на рычаг так, что усилие расположено к оси ближе, чем сила сопротивления (рис. 2.37).

Рис. 2.37. Рычаг третьего рода. Плечо усилия (ПУ) всегда меньше, чем плечо сопротивления (ПС)
В рычаге третьего рода ПУ всегда будет меньше, чем ПС. В человеческом теле большинство мышц, создающих ротацию дистальных сегментов, являются частями систем рычага третьего рода. Точка прикрепления мышцы, вызывающей движение, почти всегда ближе к оси сустава, чем внешняя сила, которая обычно создает сопротивление этому движению. На рис. 2.38 показан пример рычага третьего рода — двуглавая мышца плеча, выполняющая сгибание сегмента предплечья/кисти с преодолением силы тяжести. Поскольку сила бицепса обозначена как УП, ротация должна происходить в направлении усилия бицепса. Сила тяжести оказывает сопротивление движению и обозначается как R.

Рис. 2.38. Рычаг третьего рода в человеческом теле. Вектор усилия бицепса (УП) находится ближе к оси (А), чем точка приложения силы тяжести (СТ)
Вращающий момент. Независимо от класса рычага, вращение сегмента зависит как от величины усилия и сопротивления, так и от расстояния между точкой приложения силы и осью. Способность любой силы вызывать вращение рычага известна под названием «вращающий момент» или «момент силы». Вращающий момент (Т) — это произведение величины прикладываемой силы (F) и расстояния (d) от точки действия силы до оси вращения. Расстояние (d) — кратчайшая дистанция между линией действия силы и осью рычага; это длина линии, проведенной перпендикулярно линии действия силы и пересекающая ось. Соответственно: Т = (F)(┴d). В схематическом примере рычага второго рода на рис. 2.35 ┴d для усилия и сопротивления соответствуют плечам рычага ПУ и ПС соответственно. В этом примере ПУ и ПС представляют собой кратчайшее расстояние между силами и осями. Если бы на рис. 2.38 были даны гипотетические размерности и расстояния, можно было бы определить абсолютный момент силы, действующий на рычаг. Допустим, двуглавая мышца плеча (УП) сокращается с силой 54 кг, действующей на расстоянии 2,5 см от оси. Вес сегмента «предплечье/кисть» (R) равен = 4,5 кг, и ЦТ сегмента находится в = 25 см (ПС) от оси. Тогда:

Двуглавая мышца плеча действует на предплечье с моментом силы в 54 кг в направлении против часовой стрелки, т. е. в положительном направлении (Туп = +54 см). Момент силы тяжести направлен по часовой стрелке, т. е. в отрицательном направлении (TR = 45 см): • чистую ротацию (или равнодействующий момент) рычага можно определить путем нахождения суммы всех моментов, действующих на рычаг (соблюдая соответствующие положительные и отрицательные значения); • силы, которые действуют через ось (на расстоянии от нее, равном нулю), не могут создавать вращающий момент в этом рычаге. Второй пункт здесь поясняет, почему мы могли пренебрегать эффектом силы тяжести и контактом с клином на качелях (см. рис. 2.31). Поскольку обе эти силы действовали через ось вращения качелей (клин), они не могли создавать момент вращения качелей и не имели отношения к определению равнодействующего момента вращения. Если сумма всех моментов вращения равна нулю, моменты уравновешены, и рычаг не вращается, т. е. рычаг находится во вращательном равновесии, когда: ΣТ = 0. В примере выше, где вращательный момент бицепса был равен +54 кг/см, а момент силы тяжести 45 см, равнодействующий момент равнялся +9 см, или 9 см в направлении против часовой стрелки (сгибание сегмента «предплечье/кисть»).
2.8.2. Сложение сил На рис. 2.39 показан сегмент «предплечье/кисть», на который действуют три силы: мышечная сила двуглавой мышцы плеча, в месте ее прикрепления к предплечью (ОСм = =54 кг), сила тяжести, в ЦТ сегмента (СТ = 4,5 кг) и сила, создаваемая контактом тяжелого шара в точке соприкосновения (СШ = 2,3 кг).

Рис. 2.39. Род рычага можно узнать при помощи определения абсолютного момента силы, действующей на рычаг. Чистая ротация будет в направлении силы УП
Плечи рычагов этих сил — 3 см и 38 см соответственно. Мы можем найти абсолютный момент, действующий на рычаг, путем нахождения суммы моментов, создаваемых каждой из сил. Мы также хотим определить род рычага; эта задача упрощается, если мы сложим силы таким образом, пока не останется одно усилие и одно сопротивление. В системе параллельных сил все силы, вызывающие вращение в одном направлении, могут быть представлены одним вектором, который направлен в ту же сторону, и по величине равен сумме величин сложенных сил. Векторы СТ и СШ можно сложить и представить в виде одного вектора СТСШ. Точка приложения равнодействующего вектора СТСШ будет находиться на линии между двумя исходными векторами. Примерно так же располагается ЦТ двух сегментов. Теперь можно точно определить точку приложения новой равнодействующей силы: • когда две или более параллельных силы, действующих на рычаг, складываются в единую равнодействующую, величина этой равнодействующей равна сумме величин исходных сил и будет действовать в том же направлении; • когда две или больше параллельных силы, действующих на рычаг, складываются в одну равнодействующую, то момент вращения, производимый этой равнодействующей, будет равен абсолютной величине сил, произведенных исходными силами; • точку приложения равнодействующей можно найти, если известны ее величина и момент вращения (выполняется при помощи решения уравнения для перпендикулярного расстояния): ┴d = T ÷ F. СТСШ будет равна сумме величин слагаемых сил СТ + СШ: СТСШ = (4,5 кг) + (2,3 кг), СТСШ = 6,8 кг. Вращающий момент СТСШ будет таким же, как чистые моменты, создаваемые векторами СТ и СШ: ТСТ = (-4,5 кг) (25 см); ТСШ = (-2,3 кг) (38 см); ТСТ = -112,5 кг/см; ТСШ = -87,4 кг/см. Таким образом, ТСТСШ должен быть: ТСТСШ = (-112,5 кг/см) + (-87,4 кг/см); ТСТСШ ~= -200 кг/см. Поскольку известны и вращающий момент, и величина СТСШ, то можно определить расстояние (┴d): ┴d = T ÷ F; ┴d = -200 кг/см ÷ 4,5 кг/см; ┴d = 44,4 см. Равнодействующая сила СТСШ на рис. 2.39 равна 0,7 кг и действует на расстоянии 44 см от оси, момент вращения равен 200 кг/см, действует в направлении по часовой стрелке. Хотя количество сил, действующих на сегмент «предплечье/кисть» было сведено до двух (ОСм и СТСШ), род рычага нельзя определить, пока мы не установим, какая сила оказывает действие, а какая — противодействие. Для того чтобы это определить, мы должны оценить направление движения. Сила действия (усилие) — это та сила, которая вызывает движение в направлении чистого момента. Для определения чистого момента, действующего на сегмент «предплечье/кисть» на рис. 2.39, следует найти момент, создающийся мышцами. Момент, создаваемый мышцами, равен: ТОСм = (+54,4 кг) (2,5 см); ТОСм = 136 см. Результирующий момент, действующий на рычаг, равен сумме моментов, созданных СТСШ и ОСм: T = ТОСм + ТСТСШ; T = (+54,4 кг/см) + (-79,4 кг/см); T = -25 см. Сегмент «предплечье/кисть» вращается в направлении по часовой стрелке (разгибание локтя) с величиной вращающего момента в -55 кг/см. Соответственно, СТСШ является силой действия, а ОСм — силой противодействия. Сила противодействия (сопротивление) действует между осью и силой действия, поэтому эти две силы работают в рычаге второго рода. В этом примере анализировались точки, которые просто указывают на то, что локоть разгибается (кинематическое описание). Такой анализ может привести к ошибочному выводу относительно того, какие мышцы могут быть активными (кинетика). В данном примере локоть разгибается, несмотря на то, что активных разгибателей локтя в данный момент нет. Фактически единственной активной мышцей является сгибатель локтя. Понимание мышечных и других сил, участвующих в любом движении, может прийти только через кинетический анализ движения (динамический анализ), а не за счет простого описания места, направления или размерности движения. В примерах, приведенных как для рис. 2.38, так и для рис. 2.39, двуглавая мышца плеча, сгибатель локтя, развивает силу в 54 кг. Однако в одном случае локоть сгибается (см. рис. 2.38), а в другом — разгибается (см. рис. 2.39). В последнем примере сила мышцы, постоянно направленная на сгибание, оказывается слабее суммарной силы тяжести и веса. По сути, сгибатель локтя действует как тормоз, или устройство контроля для двух внешних сил. Поскольку мышца тянет локоть в одном направлении, а рычаг движется в противоположную сторону, мышца должна удлиняться (два ее прикрепления расходятся в стороны). Когда удлиняется активная мышца, она производит эксцентрическое сокращение. Эксцентрическое сокращение может наблюдаться только тогда, когда мышца оказывает усилие сопротивления, т. е. эксцентрическое сокращение противодействует силе, вызывающей движение. Когда активная мышца укорачивается (это бывает всякий раз, когда мышца осуществляет усилие), сокращение является концентрическим. Когда бицепс производил усилие и вызывал сгибание локтя, сегмент «предплечье/кисть» оказывался рычагом третьего рода. Когда мышца создавала сопротивление, этот же сегмент становился рычагом второго рода. Поскольку большинство мышц в теле действует на рычаги третьего рода (концентрическое сокращение мышцы при свободном дистальном плече рычага), то наиболее часто рычаги второго рода встречаются в организме, когда тем же мышцам приходится сокращаться эксцентрически, играя роль тормозов (управляемого сопротивления) для противодействия внешним силам: • когда активная мышца укорачивается, (сокращение является концентрическим), она должна перемещать рассматриваемый сегмент в направлении собственной тяги, соответственно, тогда она является мышцей усилия; • когда активная мышца удлиняется, она сокращается эксцентрически и осуществляет тягу в направлении, противоположном движению сегмента, т. е. оказывает сопротивление и служит средством контроля силы, вызывающей движение (или его замедление); • когда рычаг находится во вращательном равновесии, мышцы, действующие на рассматриваемый сегмент, не укорачиваются и не удлиняются. Такие мышцы могут выполнять изометрическое сокращение (iso = равный отрезок; metric = длина). В таком случае мышцу усилия и сопротивления выбирать можно произвольно.
2.8.3. Механическое преимущество и его компромиссы Механическое преимущество. Механическое преимущество (МПР) есть мера эффективности рычага (относительная эффективность силы действия (усилия) по сравнению с силой противодействия (сопротивления)). МПР связано с классификацией рычага и может использоваться для развития союзами релевантности концепции родов рычага. МПР — это отношение плеча усилия к плечу сопротивления, или: МПР = ПУ и ПС. Когда плечо усилия (ПУ) больше, чем плечо сопротивления (ПС), МПР > 1, то величина силы действия может быть даже меньше, чем силы противодействия, тем не менее она «победит» (вызовет движение в направлении тяги). Вспомним, что вращающий момент силы действия всегда по определению больше, чем вращающий момент силы противодействия, или: (УП)(ПУ) > (R)(ПС) Когда ПУ больше, чем ПС (как в случае, если МПР > 1), то УП может быть меньше, чем R и все же создаст больший момент. Чем больше отношение ПУ/ПУ, тем меньшей может быть УП по сравнению с R, и все же она будет «выигрывать». Преимущество рычага с МПР большим, чем 1, попросту говорит о том, что сила действия может преодолеть сопротивление, расходуя на это гораздо меньше усилий, чем тратится на сопротивление. В примере, показанном на рис. 2.39, УПУ была представлена вектором СТСШ, действующим на расстоянии 11,7 см от оси. R представляла собой силу бицепса, действующую на расстоянии 2,5 см от оси. Таким образом: МПР = 29,6 см ÷ 2,5 см ~= 12 см. Сегмент «предплечье/кисть», рычаг второго рода, был эффективен, потому что ему требовалось только 6,8 кг силы СТСШ для преодоления 54 кг силы, развиваемой двуглавой мышцей плеча. Рычаг второго рода (ПУ и ПС) эффективен всегда, иначе говоря, его МПР всегда больше 1, хотя величина МПР может изменяться в зависимости от рычага и сил, на него действующих. Здесь следует отметить, что МПР определяется длинами плеч рычага, но не величиной усилия и сопротивления. Хотя в рычаге второго рода сила действия может быть меньше силы противодействия, она не обязательно должна быть таковой. Так, если бы СТСШ на рис. 2.39 имела бы величину в 68 кг, а ОСм оставалась бы равной 54 кг, СТСШ все равно создавала бы больший момент (еще как больший!) и по-прежнему оставалась бы силой действия. Механическое же преимущество рычага было бы по-прежнему равно 11,7. В рычагах третьего рода ПУ всегда меньше, чем ПС, поскольку сила действия работает ближе к оси, чем сила противодействия. МПР рычага третьего рода, таким образом, всегда будет меньше 1. Рычаг третьего рода неэффективен в том плане, что усилие, требуемое для придания ему движения, должно быть больше, чем сопротивление. Для того чтобы создать момент больший, чем сила противодействия, сила действия должна быть большей, потому что она работает через меньшее плечо: • во всех рычагах второго рода МПР рычага всегда больше 1. Величина силы действия может быть (хоть это и не обязательно) меньше, чем сопротивление; • во всех рычагах третьего рода МПР рычага всегда меньше 1. Величина усилия должна быть больше сопротивления, чтобы сила действия создавала больший момент; • для рычагов первого рода правил в отношении МПР нет. ПУ может быть больше, меньше, или равно ПС. Это зависит от уровня. Компромиссы механического преимущества. Уже говорилось, что большинство мышц человеческого тела действует как части рычагов третьего рода, сокращаясь концентрически, при свободном дистальном рычаге. Иными словами, может показаться, что структура человеческого тела неэффективна. Фактически мышцы тела построены так, чтобы брать на себя груз «механического неудобства» и решать задачу движения рычага в пространстве. На рис. 2.40,а показано сгибание сегмента «предплечье/кисть» (ротация против часовой стрелки) за счет концентрически сокращающейся мышцы (ОСм), преодолевающей сопротивление силы тяжести (СТ).
Рис. 2.40. В механически неэффективном рычаге третьего рода движение точки приложения УП (ОСм) по малой дуге создает большую дугу движения рычага на дистальном конце (а). В механически эффективном рычаге второго рода движение точки приложения УП (СТ) по малой дуге вызывает небольшое увеличение дуги на дистальном конце (b)
Это рычаг третьего рода, поскольку усилие прилагается ближе к оси, чем сопротивление. Уже демонстрировалось, что для того чтобы произвести сгибание сегмента «предплечье/кисть», величина ОСм должна быть существенно большей, чем СТ. Система и в самом деле неэффективна. Однако когда ОСм тянет за место прикрепления (на проксимальной части рычага «предплечье/кисть») по очень маленькой дуге, дистальная часть рычага перемещается по гораздо большей дуге. Хотя сила мышцы, необходимая для движения, была большой, по сравнению с сопротивлением, она вызвала значительное угловое смещение и большую угловую скорость дистальной части сегмента. Там, где задачей человеческой функции является максимальное угловое смещение дистального сегмента в пространстве (за счет расхода энергии), использование рычага третьего рода эту задачу успешно решает. Фактически чем короче плечо рычага усилия (чем меньше механическое преимущество), тем больше угловое смещение и угловая скорость дистального конца рычага для данной дуги смещения за счет силы действия. В рычагах второго рода в человеческом организме усилие обычно (хоть и не всегда) является внешней силой. Хотя усилие в рычаге второго рода может быть меньше, чем сопротивление, угловое смещение и скорость на дистальном конце сегмента тоже будут меньшими. Малая дуга точки приложения силы действия (СТ) выражается только лишь в небольшом приросте углового смещения дистального сегмента (см. рис. 2.40,b). В любом рычаге второго рода (и в рычаге первого рода, если ПУ больше ПС) рычаг оказывается эффективным в плане силового выхода для создания момента, однако выигрыш в плане углового смещения дистального конца сегмента в пространстве весьма невелик. По сути, большее ПУ (явное механическое преимущество) приводит к меньшему угловому смещению дистального конца для данного усилия: • когда мышца является источником силы действия, а ПУ меньше ПС, то усилие должно быть довольно значительным, однако, необходимые затраты мышечной силы нивелируются значительным угловым смещением и большой угловой скоростью дистальной части сегмента. Это справедливо (в различной степени) для всех рычагов третьего рода и рычагов первого рода, в которых ПУ больше ПС; • когда силой действия является внешняя сила, и ПУ больше ПС, то усилие может быть много меньше сопротивления, однако меньшим будет и выигрыш в угловом смещении и скорости. Это справедливо (в различной степени) для всех рычагов второго рода и рычагов первого рода с ПУ большим, чем ПС. Когда рассматриваются преимущества и недостатки рычагов каждого рода, важно помнить о роли мышц. В типичных рычагах второго рода в организме (дистальный конец свободен), эффективной силой, действующей на рычаг, является внешнее усилие. Мышца затрачивает значительное количество эксцентрического сопротивления для контролирования движения рычага. В рычагах третьего рода мышечное усилие преодолевает сопротивление, но за счет значительных запросов к этому усилию. Соответственно, мышца способна развивать значительную силу независимо от рода рычага. Как будет показано в части IV, мышца построена так, чтобы оптимизировать создание больших усилий, требуемых как для значительных угловых перемещений дистальных сегментов тела при механически неэффективных системах рычагов, так и для сопротивления внешним усилиям в механически эффективных рычажных системах.
2.9. Механическое понятие «работа»
Более полное понимание функциональной значимости классификации рычагов и роли мышц в системах человеческих рычагов может быть достигнуто через рассмотрение механического понятия работы и связанного с ней понятия энергии. В терминах механики работа проделывается силой, действующей на предмет, когда сила приложена параллельно движению предмета. Величина работы (W) прямо пропорциональна действующей силе (F) и расстоянию, пройденному предметом (d), на который эта сила действует. Проще эта взаимосвязь выражается как W = |F||d|, где направление действия силы параллельно движению, ей вызванному. Если на тело действуют несколько разнонаправленных сил, то в работе участвует только та часть силы, которая параллельна направлению движения (f||), т. е.: W = |F11||d|, или W = F∙d∙cos Q где Q — угол между F и d. Знак работы может быть положительным, если сила действует в направлении движения и отрицательным, если сила действует в направлении, противоположном движению. Если совершается вращательное движение, как при движении рычага вокруг оси сустава, то: W = |T|Q где T — вращательный момент действующей силы (УПУ х ПУ), а Q — угловое смещение точки приложения силы. Результирующая работы по перемещению предмета — всегда сумма всех работ, произведенных каждой из сил, действующих на данный предмет. На рис. 2.40,а и b мышца (ОСм) смещает точку приложения на меньшее расстояние, чем это делает сила тяжести, поскольку ОСм расположена ближе к оси, чем СТ. На рис. 2.40, b мышца выполняет отрицательную работу, поскольку прилагает свою силу в направлении, противоположном движению (она выполняет эксцентрическое сокращение). Факт, что мышцы могут совершать отрицательную работу, показывает, что сам термин «работа» является скорее механическим, чем биомеханическим понятием. Мышца, выполняющая эксцентрическое сокращение, все равно тратит энергию. Мы, люди, считаем, что любая затрата энергии является частью работы, но с точки зрения механики во время эксцентрического сокращения это не совсем верно. Если бы сопротивление в рычаге второго рода осуществлялось не мышцей, а пружиной, то эта пружина фактически никакой энергии бы не расходовала, она бы ее запасала (потенциальная энергия), поскольку сама по себе работы по перемещению не производила. Как мы увидим в части IV, активные сократительные элементы мышцы не аналогичны механической пружине. Однако некоторые части мышцы (пассивные параллельные и последовательные компоненты соединительной ткани) ведут себя практически так же, как пружина: при вытягивании эти части мышцы запасают энергию. Эффект отрицательной работы, совершаемой мышцей, состоит в том, что при эксцентрическом сокращении в 54 кг она тратит меньше энергии, чем потребовалось бы для концентрического сокращения с такой же силой и при таком же перемещении. Итак, суммируем: • когда мышца совершает усилие в рычаге третьего рода, она производит концентрическое сокращение и выполняет положительную работу. От нее требуется дополнительная сила и энергия для увеличения углового смещения и угловой скорости; • когда мышца оказывает сопротивление в рычаге второго рода, она выполняет эксцентрическое сокращение и отрицательную работу, затрачивая при этом меньше энергии, чем мышца, сокращающаяся с такой же силой, но концентрически.
2.10. Момент силы плеча рычага
В примерах, в которых рассчитывался вращающий момент (T = F||┴d|), — ┴d была эквивалентна плечу силы рычага. Всякий раз, когда линия действия силы расположена под углом 90° к сегменту, ┴d будет идти вдоль рычага и совпадать с плечом рычага для этой силы. Гораздо чаще, однако, в организме человека силы действуют не под прямым углом. Это особенно справедливо для сил, развиваемых мышцами. Линии действия мышц редко даже приближаются к углу 90°, потому что это означало бы, что мышца перпендикулярна кости. Если бы такое было правилом, а не исключением, люди имели бы весьма странную форму. Линии действия большинства мышц проходят почти параллельно костям, к которым они прикрепляются. Когда сила действует не под углом в 90° к рычагу, то плечо рычага не длиннее, чем кратчайшее расстояние между линией действия силы и осью сустава. Плечо момента (mа) всегда есть кратчайшее расстояние между линией действия и осью сустава, и находится при помощи измерения длины линии, проведенной перпендикулярно вектору силы, пересекающему ось сустава. Соответственно: ma = ┴d и T = |F||ma|. Когда сила действует под прямым углом к сегменту, ma и плечо рычага (ПР) эквивалентны. При всех других углах, как будет видно далее, ma будет меньше, чем ПР.
2.10.1. Плечо момента мышечной силы На рис. 2.41 сила, действующая на рычаг, имеет постоянную величину, но угол ее действия на рычаг меняется, и, соответственно, меняется длина плеча момента. Угол действия силы есть угол между линией действия и рычагом со стороны оси сустава. Плечо рычага, как было определено ранее, есть расстояние от точки приложения силы до оси сустава. ПР на рис. 2.41 неизменно во всех трех вариантах. Однако ma изменяется при изменении угла действия силы. Вращающий момент, развиваемый силой, является произведением величины F (в кг) и величины ma (в см) для каждой из трех позиций. Соответственно, как плечо момента, так и вращающий момент, создаваемый силой, различны при каждом из трех углов действия.

Рис. 2.41. Угол тяги силы есть угол между рычагом и вектором со стороны оси сустава. Когда угол тяги изменяется, это же происходит с размером плеча момента силы
На рис. 2.42 мышечный вектор бицепса показан схематически при воздействии на предплечье, когда локтевой сустав согнут под углами в 35°, 70°, 90° и 135°. Это углы сгибания сустава, а не углы действия мышечной силы! Нас интересует угол действия мышечной силы. Мы обращаемся к суставному углу потому, что этот угол можно легко измерить, тогда, как угол приложения силы у человека измерить крайне трудно, а зачастую вообще невозможно. Угол линии действия ОСм на рычаг предплечья (см. рис. 2.42) заметно меняется при изменении угла сгибания локтевого сустава. Когда изменяется угол приложения силы, меняется и длина та. Наименьшим ma будет на рис. 2.42,а и наибольшим — на рис. 2.42,c.
Рис. 2.42. Схематическое изображение двуглавой мышцы плеча (ОСм), действующей на предплечье под углом: 35°(a), 70°(b), 90°(c) и 135° локтевого сгибания (d)
Если сила сокращения бицепса постоянна и ~= 23 кг по всей амплитуде движения в суставе, то вращающий момент будет изменяться прямо пропорционально изменению ma силы. Вращающий момент при сгибании локтя в 35° (когда ma меньше всего), при сгибании локтя в 90° (наибольшее ma).Способность мышцы вращать сустав будет меняться при движении, даже если мышца сокращается с постоянной силой. Плечо момента (ma) — это кратчайшее расстояние между вектором и осью сустава. Это расстояние может быть бесконечно малым (когда линия действия проходит через ось сустава, оно будет равно нулю), но оно никогда не будет больше, чем расстояние между точкой приложения силы и остью сустава (ПР). Поскольку при действии силы под углом в 90° ПР и ma совпадают как на рис. 2.42,c, ma любой силы будет наибольшим, когда сила действует под прямым углом к рычагу. Когда ma является наибольшим, потенциал создания силой вращающего момента тоже достигает максимума. Если сила действует на рычаг под углом более 90°, как на рис. 2.41,c и 2.42,d (независимо от положения сустава!), то ma находится путем продолжения вектора (это единственный способ, когда линия может быть проведена, перпендикулярна Z вектору и при этом будет пересекать ось сустава). Вспомним, что для оценки эффекта векторов они могут быть продолжены. «Хвост» продолженного вектора будет ближе к оси при увеличении угла действия вектора. Если вектор увеличивает угол действия свыше 90°, ma будет уменьшаться: • при постоянной силе сокращения вращающий момент, создаваемый мышцей, будет наибольшим в точке амплитуды движения, а линия действия мышцы находится максимально далеко от оси сустава; • ma любой силы будет наибольшим, когда линия действия находится под прямым углом к рычагу, или когда линия действия проходит как можно ближе к 90°. Когда задачей мышцы является либо вращение сегмента, либо сопротивление его вращению, мышца наиболее эффективна с точки зрения биомеханики в той точке амплитуды, в которой она может создать наибольший вращающий момент, т. е. в точке, в которой ma мышцы является наибольшим. Критическим фактором оптимизации вращающего момента является достижение угла действия силы, максимально близкого к прямому углу. Угол приложения силы обычно не связан напрямую с суставным углом. Пример с двуглавой мышцей плеча на рис. 2.42 необычен в том смысле, что на нем угол сгибания локтя аналогичен углу приложения силы. Это справедливо потому, что линия действия бицепса устойчиво параллельна плечевой кости. Для большинства мышц угол действия силы значительно отличается от угла между двумя костями, образующим сустав. На рис. 2.43 показано ma дельтовидной мышцы в двух различных положениях плечевого сустава. На рис. 2.43,a отведение плечевого сустава составляет 0°, но угол тяги дельтовидной мышцы и плечевой кости составляет примерно 5°.
Рис. 2.43. Линия действия дельтовидной мышцы (ОСм) при отведении плеча в 0° (а) и в 60° (b). Плечо момента (ma) дельтовидной мышцы при отведении на 60° является большим, чем в любой другой точке амплитуды плечевого сустава
На рис. 2.43,b отведение в плечевом суставе составляет 60°, при этом изменение угла между линией действия дельтовидной мышцы и плечевой костью увеличилось всего на 15°. Однако при отведении в плечевом суставе на 60° дельтовидная мышца находится максимально далеко от оси плечевого сустава; ma для этой мышцы является максимальным, несмотря на то, что угол действия силы мышцы по-прежнему относительно невелик (хоть и больше, чем при отведении в 0°). Наибольшее ma любой силы в том случае когда угол приложения силы максимальный (или близок к 90° по отношению к рычагу), независимо от позиции сустава.
2.10.2. Плечо момента силы тяжести Угол приложения любой силы к рычагу может изменяться по мере движения рычага в пространстве. Изменение угла приложения вызывает уменьшение или увеличение ma этой силы. На рис. 2.44 показано предплечье в тех же диапазонах сгибания локтя, что и на рис. 2.42; сила тяжести действует на рычаг предплечья в ЦТ. Когда меняется угол действия ЛСТ (гравитационный вектор), изменяется и длина ma. Как справедливо для всех сил, ma силы тяжести является максимальным, когда сила действует на рычаг под прямым углом. Однако, в отличие от мышечных сил, ЛСТ вертикальна всегда, и совершенно не зависит от положения сустава.
Рис. 2.44. Сила тяжести (СТ), действующая на предплечье под углом локтевого сгибания в:35°(а), 70°(b), 90°(c) и 145°(d). Силы тяжести та меняется в зависимости от положения предплечья
Например, на рис. 2.45 показаны две разные позиции предплечья и плечевой кости в пространстве. В обоих случаях локоть согнут на 135°. На рис. 2.45,a ma очень велико, поскольку угол между ЛСТ и рычагом равен 90° (величина ma достигает максимума). На рис. 2.45,b значительно меньше ma, поскольку угол между ЛСТ и рычагом всего около 30°: • так как сила тяжести всегда действует по вертикали вниз, угол приложения силы тяжести изменяется по мере движения сегмента в пространстве; • сила тяжести будет действовать перпендикулярно к сегменту, если он расположен параллельно земле; • когда рычаг в теле расположен параллельно земле, сила тяжести, действующая на него, создает максимальный вращающий момент.
Рис. 2.45. ЛСТ остается вертикальной, несмотря на позицию предплечья в пространстве. Изменяется ma по мере изменения угла приложения ЛСТ к предплечью
На рис. 2.46 показаны три ранжированных упражнения на сгибание туловища. Межпозвоночное пространство от L5 до S1 рассматривается здесь как гипотетическая ось, вокруг которой вращается разделенный на части сегмент «голова/руки/туловище» (ГРТ). На рис. 2.46,a руки подняты над головой (краниальное положение). ЛСТ находится на большом расстоянии (ma) от оси L5-S1. Вращающий момент, создаваемый силой тяжести направлен против часовой стрелки и равен произведению веса ГРТ (2/3 веса тела) и ma. Если эту позу поддерживать (ротационное равновесие), то мышцы живота должны развивать равный вращающий момент в противоположном направлении.
Рис. 2.46. Изменение положения рук смещает ЦТ верхней части тела, изменяет ma и уменьшает вращающий момент силы тяжести (СТ) отакс
На рис. 2.46,b и c, когда руки идут вниз, ЦТ движется каудально. Смещение ЦТ ГРТ (за счет изменения взаимного расположения сегментов) сдвигает ЛСТ ближе к оси L5-S1 и уменьшает длину ma. Поскольку при опускании рук вес верхней части тела не изменяется, величина момента силы тяжести, действующего на туловище, уменьшается пропорционально уменьшению ma. Уменьшающийся гравитационный момент требует для сохранения равновесия, и меньшего момента противодействия со стороны мышц живота. Соответственно, удерживать такое положение тела легче всего на рис. 2.46,c и труднее всего — на рис. 2.46,a. Угол тяги мышц живота при продвижении рычага туловища в пространстве меняется относительно мало. Когда от мышц живота требуется увеличение вращающего момента, увеличение его происходит преимущественно за счет увеличения силы сокращения мышц (ОСм). Если мышцы живота слабы, они могут быть неспособны развить силу, необходимую для уравновешивания максимального гравитационного момента (такого, как на рис. 2.46,а). Однако они могут при этом противодействовать меньшему гравитационному моменту, такому, как на рис. 2.46,b, или минимальному моменту (см. рис. 2.46,с).
2.10.3. Анатомические блоки Мы уже говорили, что анатомические блоки изменяют направление, но не величину мышечной силы. Однако изменение направления усилия приводит к улучшению способности мышцы к генерации вращающего момента. Изменение направления или отклонение линии действия мышцы в анатомическом блоке всегда идет в сторону от оси сустава. При отклонении линии действия от оси сустава ma мышечной силы увеличивается. На рис. 2.47,а показано действие четырехглавой мышцы бедра на большую берцовую кость. На рисунке показано схематическое изображение линии действия четырехглавой мышцы без коленной чашечки. Линия действия идет параллельно бедренной кости, и вблизи от коленного сустава ma невелико. На рис. 2.47,b показано, как коленная чашечка отклоняет линию действия от оси сустава; ma при этом оказывается значительно больше.
Рис. 2.47. Схематическое изображение линии действия четырехглавой мышцы бедра: a — без коленной чашечки; b — отклонение с коленной чашечкой, что приводит к увеличению ma
Если четырехглавая мышца бедра сокращается с одинаковой силой как при наличии коленной чашечки, так и при ее отсутствии, то вращающий момент, действующий на большую берцовую кость, будет большим при ее наличии, поскольку сила прикладывается на большем расстоянии от оси сустава: • анатомические блоки изменяют направление мышечной тяги; • анатомические блоки отклоняют линию действия мышцы от оси сустава, увеличивая тем самым ma мышцы и соответственно ее способность создавать вращающий момент.
2.11. Компоненты силы
Мы показали, что при данной величине силы, действующей на рычаг под некоторым углом, не равным 90°, вращающий момент будет меньшим, чем при той же силе, действующей под прямым углом. Если одинаковая сила в одной точке амплитуды может создавать меньший момент, чем в другой, то некоторое ее количество, в случае действия не под прямым углом, должно «теряться» (не вызывать вращения). Фактически вращающий момент вызывается только той частью силы, которая направлена в сторону вращения. Хотя вращающий момент — это произведение силы на плечо — кратчайшее расстояние между линией действия силы и осью сустава, он точно так же является произведением той части силы, которая направлена в сторону вращения и ее кратчайшего расстояния от оси сустава. Часть силы, направленная перпендикулярно рычагу, называется ротационным (или вращательным) компонентом силы (f). Вращающий момент может быть теперь выражен тремя эквивалентными способами. В целом: Т = |F||┴d|. При использовании величины общей силы: T = | F||ma|. При использовании только части силы, затрачиваемой на вращение рычага: T = |fr||LA|. Для того чтобы найти вращательный момент, используя величину ротационного компонента, пусть его кратчайшее расстояние от оси сустава будет ПР. ПР — это расстояние на рычаге между точкой приложения силы и осью сустава. Поскольку fr проведен перпендикулярно к рычагу, то ПР будет, по определению, перпендикулярно fr. На рис. 2.48 показана сила двуглавой мышцы плеча, действующая под углом примерно 80° к рычагу предплечья. Вращающий момент, создаваемый ОСм, можно рассчитать как |fr| х ПР, если |fr| и LA известно. Величину |fr| можно найти графически или математически, разделив вектор силы ОСм на два компонента. Так же как из двух сходящихся сил можно получить путем сложения один равнодействующий вектор, один вектор можно разложить на два сходящихся компонента. В данном случае векторы будут специально построены так, чтобы один из компонентов |fr| находился перпендикулярно рычагу. Второй компонент будет вызывать поступательное движение ft, и этот вектор проводят параллельно рычагу. По сути, поступательный компонент пройдет через ось сустава (хотя такое, как мы увидим позднее, бывает не всегда). Сила, проходящая через ось, не создает вращающего момента, однако придает сегменту линейное движение. Таким образом, разделив ОСм на перпендикулярный и параллельный компоненты, мы получаем как часть ОСм, вызывающую ротацию (часть, действующая перпендикулярно рычагу) и часть ОСм, вызывающую смещение сегмента (часть, действующая параллельно рычагу). Для разбивки равнодействующего вектора ОСм на рис. 2.48,a на перпендикулярный и параллельный компоненты мы применяем процесс, обратный сложению сил.
Рис. 2.48. Разбивка линии действия мышцы (ОСм) (а) и силы тяжести (СТ) (b) на ротационный (f) и поступательный (f) компоненты
Строится параллелограмм, в котором равнодействующая является диагональю. Здесь, для наших целей, этот параллелограмм всегда будет прямоугольником, стороны которого целенаправленно построены перпендикулярно и параллельно рычагу, т. е. под прямым углом друг к другу. Для построения прямоугольника делается следующее: • из точки приложения равнодействующей силы проводится вектор компонента fr, перпендикулярно длинной оси движущегося рычага; • из этой же точки приложения равнодействующей силы проводится вектор компонента ft, параллельно длинной оси движущегося рычага; • от окончания равнодействующего вектора проводится линия, параллельная fr. Таким образом, мы построили прямоугольник, диагональю которого является ОСм. Составляющие векторы fr и ft являются сторонами построенного прямоугольника. Если известен масштаб диаграммы, то графическое решение позволяет измерить компоненты и рассчитать величины. Например, если взять масштаб на рис. 2.48, a как 1:16 см = 4,5 кг, то вектор ОСм имеет размерность в = 145 кг. Поступательный компонент ОСсм = 23 кг, ротационный компонент будет иметь величину в ~= 86 кг. Заметим, что величина равнодействующей не равна арифметической сумме компонентов |fr| и |ft|. В любой системе сходящихся сил сумма компонентов всегда будет больше, чем величина равнодействующей. Определение величин составляющих векторов можно также провести тригонометрическим методом. Если известны величина общей силы и ее угол приложения, то: |fr| = F∙sin Q; |ft| = F∙cos Q. При любом угле приложения силы, компоненты |fr| и |ft| всегда будут в строго пропорциональных отношениях с общей силой и друг с другом. Например, на рис. 2.48 |fr| почти в 4 раза больше, чем |ft|. Это будет справедливо, независимо от величины равнодействующей (в данном случае, Fms). Если величина Fms увеличивалась или уменьшалась бы, то величина как |fr|, так и |ft| увеличивались и уменьшались бы пропорционально. Вектор |fr| оставался бы при этом примерно в 4 раза длиннее |ft|. Поступательный компонент любой силы представляет ту ее часть, которая вызывает линейное движение рычага. Поступательный компонент не «тратится», он просто действует в определенном направлении, способствуя любому движению, кроме вращения. В организме человека этот компонент силы может быть направлен либо к анализируемому суставу, либо от него. Поступательное усилие, действующее в направлении сустава, пытается переместить сегмент сустава по направлению к смежному сегменту. Поскольку сегменты при этом сближаются, то поступательное усилие, направленное к суставу, называется компрессионным компонентом. Компрессионный компонент обычно способствует устойчивости сустава, сохраняя контакт между соприкасающимися суставными поверхностями. И наоборот, поступательное усилие, направленное от сустава, стремится разделить смежные суставные сегменты, поэтому его называют компонентом расхождения или разделения. Силы расхождения, действующие в коленном суставе и вызванные применением внешней силы (груза), были показаны в примере с вытягиванием ноги на рис. 2.24. На рис. 2.48,b показано графическое разделение силы тяжести, действующей на предплечье, на ротационный и поступательный компоненты. В данном случае, равнодействующая G способствует ротации и смещению в равной мере, поскольку величины обоих компонентов почти одинаковы. Поступательный компонент силы тяжести направлен к локтевому суставу (ось движения предплечья) и, соответственно, является компрессионной силой. Было показано, что действие постоянной силы на рычаг, когда он вращается вокруг суставной оси, вызывает изменение углов приложения силы и, соответственно, изменение вращающего момента. Поскольку ротационный компонент силы — это та ее часть, которая создает вращающий момент, изменение момента при постоянном усилии должно означать изменение величины данного компонента. Аналогичным образом изменение ротационного компонента должно указывать на изменение пропорции общей силы, идущей на поступательное движение, поскольку величины ротационного и поступательного компонента находятся в обратной пропорциональной зависимости. Иначе говоря, при увеличении доли общей силы, действующей перпендикулярно рычагу, будет наблюдаться одновременное уменьшение доли силы, действующей параллельно рычагу (и наоборот): • если вращающий момент постоянной силы изменяется при движении рычага в пространстве, должен изменять угол приложения силы; • если угол приложения силы изменяется, относительные значения ротационного и поступательного компонентов также должны изменяться. Изменение момента, создаваемого постоянной силой при движении рычага вокруг оси сустава может рассматриваться либо как функция изменения ma (расстояние от оси сустава), либо как изменение ротационного компонента (доли силы, действующей перпендикулярно рычагу). Соответственно, можно считать, что эти два параметра прямо пропорциональны. На рис. 2.42 было показано изменение ma силы бицепса при четырех различных положениях локтевого сустава. На рис. 2.49 показана ma же самая сила, и те же самые положения (35°, 70°, 90° и 145° локтевого сгибания), но на этот раз указывающие на изменение величины ротационного компонента.
Рис. 2.49. Изменение величины ротационного и поступательного компонента при: 35° (a), 70° (b), 90° (c) и 145° (d) сгибания локтевого сустава
При сгибании в локтевом суставе, равном 90°, ОСм уже действует под прямым углом к рычагу, т. е. ОСм и |fr| совпадают, и сила используется исключительно для вращения, без поступательного компонента. При любом приложении силы под прямым углом две формулы вращающего момента (F х ma и f х ПР) являются практически идентичными. Если сила действует на рычаг под прямым углом, F и fr являются эквивалентами, и точно так же эквивалентами являются ma и ПР. На рис. 2.49 показано изменение не только ротационного компонента, но и поступательного компонента для всех позиций. Поступательный компонент оказывается больше ротационного как при 35°, так и при 145° локтевого сгибания. По мере того как линия действия ОСм сдвигается ближе к рычагу (ближе к параллельному положению относительно рычага), ft увеличивается. Когда линия действия ОСм удаляется от оси на 70°, поступательный компонент уменьшается. При сгибании в 90° вся сила (ОСм) является ротационной, поступательный компонент отсутствует. Поступательный компонент по мере сгибания локтя меняется не только по величине, но и по направлению. При сгибании в 35° поступательное усилие направлено к суставу (компрессия), а при 145° — от сустава (расхождение). Изменение поступательного компонента от компрессии до растягивания, как это показано на рис. 2.49, для мышечной силы необычно. Фактически большинство мышц находится близко к осям суставов и расположены они почти параллельно рычагу, т. е. линии действия их направлены к оси сустава, независимо от положения рычага в пространстве. Эффект такой организации в том, что ротационные компоненты мышечных усилий обычно невелики, зато достаточно заметны поступательные компоненты, почти всегда являющиеся компрессионными. Основная часть силы мышцы способствует скорее компрессии сустава, чем его ротации. Это увеличивает устойчивость сустава, но означает вместе с тем, что мышца должна осуществлять большее усилие для создания ротационного компонента, необходимого для перемещения рычага в пространстве. На рис. 2.50 показана равнодействующая сил плечелучевой мышцы, действующая на предплечье и увеличивающая сгибание.
Рис. 2.50. Разложение силы плечелучевой мышцы (ОСм) на ротационный и поступательный компоненты (fr) и (ft) при 35° (а), 70° (b), 90° (c) и 145° (d) сгибания в локтевом суставе
Эта мышца является более типичной мышцей организма, чем двуглавая мышца плеча. Угол приложения силы плечелучевой мышцы меняется довольно незначительно, и ротационный компонент никогда не бывает больше поступательного (хотя fr при 90° и 145° локтевого сгибания, как и fr бицепса). Поступательный компонент остается компрессионным, независимо от позиции конечности: • линии действия большинства мышц больше параллельны рычагу, чем перпендикулярны ему; • ротационный компонент мышечной силы редко бывает больше, чем поступательный; • поступательный компонент большинства мышц способствует компрессии сустава. Ограничения, существующие для мышечных сил, неприменимы для сил внешних. На рис. 2.51 показано действие силы тяжести (СТ) на ногу при различных ее положениях в пространстве. На рис. 2.51,а нога параллельна земле, и сила СТ действует на рычаг под углом в 90°. Вся величина СТ (СТ = fr) направлена на ротацию в коленном суставе в направлении по часовой стрелке (сгибание колена).
Рис. 2.51. Разложение силы тяжести (СТ) на ротационны поступательный компоненты и (ft) при разных положениях и пространстве. Сила тяжести компонент(ты): a — полностью ротационной; b — ротационный и разделительный; с — ротационный и компрессионный
На рис. 2.51,b и с сила СТ действует на ногу так, что ротационный и поступательный компоненты примерно равны по величине. Вращательный момент, оказываемый fr в коленном суставе, в обоих случаях действует по часовой стрелке. Однако поступательный компонент вектора СТ в одном случае растягивает коленный сустав, а в другом случае — сдавливает его. Изменение направления действия поступательного компонента связано с изменением положения конечности и, соответственно, с изменением угла приложения силы тяжести. Вектор СТ на рис. 2.51,b действует под углом в 135° к рычагу, а на рис. 2.51,с — под углом в 45°. На рис. 2.52 на ногу действует внешняя сила руки (СР), пытаясь согнуть ногу в колене, преодолевая сопротивление четырехглавой мышцы бедра.
Рис. 2.52. Сила руки (СР), действующая: а — на ногу под углом (тратит часть усилия в направлении растягивания); b — перпендикулярно ноге (работает только на вращение)
Предплечье/кисть создает вращающий момент по часовой стрелке. Четырехглавая мышца бедра, чтобы удержать ногу в том же положении, вынуждена создавать противодействующий момент, равный по величине. На рис. 2.52, а сила руки (СР) разложена на вращательный и поступательный компоненты. Хотя основная сила руки направлена на ротацию (fr значительно больше, чем ft), некоторое количество силы все же «тратится» на растягивание. В этом случае сила растягивания не преследует никакой полезной цели и, по сути, представляет собой «пустое» усилие. Угол приложения силы руки можно, однако, изменить так, чтобы действовать строго перпендикулярно рычагу (см. рис. 2.52,b). При таком изменении ориентации сегмента «предплечье/кисть», человек, оказывающий сопротивление рукой, может действовать с той же силой, но создавать при этом больший момент, так как сила не «расходуется» на ненужное поступательное движение. Дальнейшее манипулирование действиями руки может еще больше улучшить биомеханическую эффективность прилагаемой силы. Максимальный вращающий момент создается, когда величина ПР или ma оказывается наибольшей. Если руку положить на лодыжку (а не на верхнюю часть голени) и поддерживать угол приложения силы в 90°, то, как плечо рычага, так и вращательный компонент окажутся максимальными. За счет предельного увеличения |fr| и ПР. можно создать максимальный момент для данной величины действующей силы (СР). Итак, вращающий момент внешней силы можно увеличить за счет: • увеличения самой действующей силы; • ее приложения перпендикулярно к рычагу (или близко к перпендикуляру); • увеличения расстояния между точкой ее приложения и осью сустава.
2.12. Рычаги равновесия
2.12.1. Ротационное и линейное равновесие Если сегмент конечности не движется, он должен находиться как во вращательном (ротационном), так и в поступательном (линейном) равновесии. Рычаг находится в ротационном равновесии, когда сумма всех моментов, действующих на него, равна нулю. Если рычаг не находится в равновесии, он будет находиться в состоянии углового ускорения. Величина углового ускорения (а) прямо пропорциональна неуравновешенному моменту (Т), действующему на рычаг и обратно пропорциональна массе (m) перемещаемого рычага: aугловое = T/m. Угловое ускорение, как отмечалось ранее, добавляет к рычагу новый набор сил, которые в данной книге не рассматриваются; достаточно просто понимать, что сама по себе величина неуравновешенного момента, действующего на рычаг, может оказаться причиной недооценки всех сил, действующих на рычаг, находящийся в состоянии углового ускорения. Сила, или силы, действующие параллельно рычагу (предположим, что они лежат в одной линии с осью сустава), не оказывают влияния на вращение рычага, но вызывают его поступательное движение. Для того чтобы рычаг был в линейном равновесии, арифметическая сумма всех параллельных сил, действующих на рычаг, также должна быть равна нулю. На рис. 2.53,а показано действие силы тяжести (СТ) на зависимую (свободно висящую) ногу (сегмент «голень/стопа»).
Рис. 2.53. Действие силы тяжести (СТ) на зависимую ногу: а — висящая голень находится в ротационном и линейном равновесии. Сила тяжести нейтрализована тягой связок колена (ТСК); b — четырехглавая мышца бедра разгибает коленный сустав. Линейное равновесие достигается поступательным усилием четырехглавой мышцы (ftq1), поступательным действием силы тяжести (ftq2) и давлением бедренной кости на большую берцовую кость (БК-ББК) (ftq3)
Общая сила СТ параллельна рычагу и является чистой силой растягивания. Поскольку перпендикулярные силы на ногу не действуют, то и вращающих моментов здесь быть не может, и нога должна находиться в ротационном равновесии. Однако для расхождения коленного сустава не может существовать только одной направленной вниз и действующей независимо поступательной силы. Соответственно, должна существовать уравновешивающая и направленная вверх (компрессионная) сила (или комплекс сил), равная по величине. Компрессионные силы создаются преимущественно мышцами, и в данном примере такое усилие должно создаваться именно мышцей. Однако если человек находится в полностью расслабленном состоянии, то мышца развивает очень малое усилие или не развивает его вообще. Сила, необходимая для создания линейного равновесия, должна исходить из какого-то иного источника, находящегося в контакте с ногой. Эта сила может обеспечиваться направленной вверх тягой связок коленного сустава, находящихся в контакте с голенью и способными «тянуть» голень вверх с достаточной силой. Поскольку связки окружают коленный сустав, равнодействующую связочную силу можно рассматривать в данной ситуации, как действующую через коленный сустав и создающую через него абсолютное значение поступательной силы. На рис. 2.53,b показана нога в состоянии разгибания в коленном суставе. Разгибание происходит за счет четырехглавой мышцы бедра, преодолевающей действие силы тяжести (заметим, что векторы построены не в масштабе). Так как нога разогнута, то должен присутствовать результирующий момент, действующий против часовой стрелки. В данном примере сила четырехглавой мышцы бедра будет силой действия (вызывающей движение), а сила тяжести будет силой сопротивления, или противодействия. Силы четырехглавой мышцы (ОСм) и тяжести (СТ) были разложены по компонентам. Хотя нога может вращаться в разгибании и таким образом испытывать угловое ускорения (абсолютная T > 0), она должна находиться в линейном равновесии, иначе сустав разрушится, и нога будет ускоряться вверх уже с отрицательным углом. Сумма параллельных (поступательных) компонентов, действующих на ногу, таким образом, должна быть равна нулю. Поступательный компонент силы тяжести (ftq) равен 2,3 кг и действует на расхождение сустава. Поступательный компонент четырехглавой мышцы бедра (ftq) является компрессионной силой и равен 23 кг. Таким образом, представляется, что чистая компрессионная сила равна 20 кг, и она должна тянуть большую берцовую кость с ускорением к бедренной кости, пока обе кости не соприкоснутся. Как только они соприкасаются, возникают две силы: «большая берцовая кость и бедренная кость» (ББК-БК) и «бедренная кость, и большая берцовая кость» (БК-ББК). Поскольку нам интересно, находится ли в линейном равновесии большая берцовая кость, мы видим, что БК-ББК равна по величине и противоположна по направлению абсолютной величине силы компрессии, если только нет других сил, которые надо учитывать. Сила реакции сустава — это простая пара «действие-противодействие», или комплекс контактных сил, действующих в двух смежных костных сегментах.
2.12.2. Другие эффекты ротационных и поступательных сил Теперь мы знаем, что силы, действующие на рычаг, можно разложить на компоненты, один из которых будет расположен перпендикулярно, а второй — параллельно рычагу. В реальности, эффекты ротационных и поступательных компонентов в человеческом организме несколько сложнее. Один сегмент не только вращается вокруг другого, но, так как наши кости сочленяются не при помощи истинных шарниров, один из сегментов может двигаться так, будто он является просто соседним (касающимся) сегментом по отношению к другому. В результате получается, что ротационные силы могут вызывать поступательное движение, а поступательные — ротацию! Это лучше всего объяснить на примере. На рис. 2.54 показана сила действия четырехглавой мышцы бедра на большую берцовую кость.
Рис. 2.54. Ротационная сила (F1) четырехглавой мышцы бедра (ОСм) не только вращает большую берцовую кость в коленном суставе, но также создает усилие сдвига между большой берцовой и бедренной костью. Это усилие четырехглавой мышцы может быть частично уравновешено противодействием силы сдвига (СС) со стороны натянутой передней крестообразной связки (ПКС) колена. Как (F2) четырехглавой мышцы, так и КС ПКС усиливает контакт между большой берцовой и бедренной костью
Сила ОСм раскладывается на ротационный F1 и поступательный F2 компоненты, которые вызывают ротацию и компрессию сустава соответственно. Мы будем считать, что коленный сустав имеет фиксированную ось. Отметим, однако, что компонент Ft расположен не только перпендикулярно к большой берцовой кости, но и параллельно к ее суставной площадке. Соответственно компонент F2 расположен параллельно кости и перпендикулярно ее суставной площадке. Сила, которая действует перпендикулярно контактным поверхностям, является контактной силой. Факт, что F2 создает контакт между большой берцовой костью и бедренной костью, уже рассматривался, и мы идентифицировали эту силу как компрессионную. Однако до этого момента мы не видели (или не понимали), что многие поступательные силы, такие как F2 в настоящем примере, проходят не непосредственно через ось, а на некотором расстоянии от нее. Когда сила приложена на некотором расстоянии от оси сустава, возникает вращающий момент. Принимая во внимание форму суставных поверхностей, видно, что в месте прикрепления четырехглавой мышцы поступательный компонент ее силы не только сдвигает суставные поверхности, но и создает небольшой вращательный момент! Точно так же, как компонент F2 вызывает как поступательное движение, так и небольшую ротацию большой берцовой кости, двойным эффектом обладает и компонент F1. Такая сила, как F1, действует параллельно контактным поверхностям, которые могут свободно двигаться одна по другой (не истинный шарнир), и пытается вызвать линейное движение между этими поверхностями. Это и есть определение силы смещения. Компонент F1 будет вращать большую берцовую кость только в том случае, если она гарантирована от линейного движения (смещения) за пределы бедренной кости. Нам следует идентифицировать еще одну линейную силу, действующую на большую берцовую кость и противодействующую силе смещения F1. Одна из возможностей — это сила тяжести (СТ), действующая на большую берцовую кость. Сила тяжести, как и сила четырехглавой мышцы, имеет компоненты с двойными функциями. Ротационная сила тяжести (РСТ) перпендикулярна большой берцовой кости, но параллельна ее суставной поверхности и действует в направлении, сдвигающем большую берцовую кость назад. Соответственно, она противодействует силе смещения четырехглавой мышцы. Однако величина F1 будет существенно большей, чем frq. Чтобы четырехглавая мышца удерживала большую берцовую кость на месте или разгибала коленный сустав, вращающий момент ее силы должен быть равен, или превышать момент силы тяжести. Поскольку сила тяжести действует на гораздо большем расстоянии, чем сила четырехглавой мышцы, величина F1 должна быть гораздо больше, чем frq Поскольку силы смещения являются линейными, абсолютная величина смещения находится простым сложением их величин. Если F1 больше, чем frq, то имеется абсолютная сила смещения, пытающаяся сместить большую берцовую кость вперед, за пределы бедренной кости. Как только между двумя контактными поверхностями возникает абсолютная сила смещения, возникает и противодействующая сила трения, т. е. потенциально мы имеем силы «трение большая берцовая кость», вызванную компрессией (контактом) большой берцовой и бедренной кости. Максимальная величина этой силы трения, однако, будет довольно мала (независимо от силы контакта), так как коэффициент трения (μS) суставных хрящей предельно мал (FX < FC х μS). Вероятно, мы будем иметь абсолютную силу смещения даже с учетом силы тяжести и силы трения. На самом деле, большая берцовая кость будет двигаться только за пределы бедренной кости, пока это ей будет позволять натяжение связок или суставной капсулы. На рис. 2.54 мы добавили тягу передней крестообразной связки (ПКС) колена к силам, действующим на большую берцовую кость. Тяга вектора ПКС раскладывается на два компонента, расположенных перпендикулярно и параллельно суставной поверхности большой берцовой кости. Контактный компонент (КС) ПКС будет просто увеличивать компрессию между большой берцовой костью и бедренной костью. Компонент смещения (СС) ПКС будет создавать изменение положения бедренной кости относительно большеберцовой в направлении, противоположном силе, развиваемой четырехглавой мышцей (и добавится к смещению силы тяжести). Предполагая, что связка достаточно сильна, компонент СС ПКС должен уравновешивать эффект абсолютного смещения F1 четырехглавой мышцы, позволяя ему вращать сегмент с минимальным выходом большой берцовой кости за пределы бедренной. Большинство связок и суставных капсул устроено так, чтобы не только натягиваться при открытии сустава, но и оказывать сопротивление абсолютной силе смещения по суставным поверхностям: • сила или компонент силы, действующие перпендикулярно костному рычагу, и параллельно контактным суставным поверхностям, создают как вращающий момент вокруг суставной оси, так и смещение между суставными поверхностями; • сила или компонент силы, которые действуют параллельно костному рычагу, но не пересекают ось сустава, вызывают не только компрессию или расхождение, но и некоторое количество вращения; • сумма всех вращающих моментов в суставе обычно больше нуля; т. е. в суставе обычно наблюдается угловое ускорение (вращающий момент); • сумма линейных сил (параллельных рычагу и параллельных контактным поверхностям) должна, в конечном счете, приводить к линейному равновесию, в противном случае сустав будет поврежден. Равновесие рычага должно оцениваться, исходя из: 1) ротационных сил, действующих вокруг сустава (вращающего момента); 2) поступательных сил, действующих через сустав и перпендикулярных суставным поверхностям (равнодействующей сил реакции сустава, компрессионных сил и растягивающих сил); 3) поступательных сил, действующих через сустав и параллельно суставным поверхностям (равнодействующей сил смещения и сил трения).
Резюме
Физические законы, которые управляют равновесием или движением рычагов в человеческом организме, исследовались на базовом уровне. Это, однако, только первый шаг в понимании функции человека. Следующий шаг включает в себя изучение строения суставов, определение различного характера контактных поверхностей и амплитуды движений, допустимых в суставах, а также строение связок, поддерживающих эти суставы. Кроме того, необходимо изучить строение мышц, где особое внимание следует обратить на свойства, влияющие на силу мышцы (ОСм), которую как одна, так и несколько мышц совместно могут прилагать к рычагу.
Контрольные вопросы
1. В какой плоскости и вокруг какой оси происходит вращение головы? 2. К чему относится наименование плоскости движения, к кинетике или к кинематике? Почему? 3. Когда при ходьбе стопа выносится вперед для контакта с опорой, то какой вид движения стопы мы наблюдаем? 4. На что действует сила «карандаш-кисть»? Что является источником? 5. Что общего между собой имеют следующие силы: «карандаш-стол»; «книга-стол»; «стакан-стол» и «промокашка-стол»? 6. Какие характеристики являются общими для всех векторов силы тяжести? 7. Какие обобщения можно сделать для ЛСТ (вектор силы тяжести) всех устойчивых предметов? 8. Что происходит с ЦТ твердого предмета, когда предмет перемещается в пространстве? 9. Что происходит с ЦТ тела при изменении взаимного расположения его сегментов? Что произойдет с ЦТ тела, если полностью ампутировать правую руку? 10. Объясните, как найти (комбинированный центр) ЦТ двух смежных предметов. 11. Студентка несет свои учебники за осенний семестр в правой руке. Какие изменения ЦТ вызывает дополнительный вес? Какова наиболее вероятная реакция ее тела на эти изменения? 12. Почему «Ванька-встанька» всегда возвращается в исходное положение? 13. Опишите типичную походку ребенка, только начавшего учиться ходить. Почему ребенок ходит именно таким образом? 14. Укажите название, точку приложения, размерность и направление силы реакции на тело человека в постели, если вес тела равен 80 кг. 15. Каковы силы реакции на каждую из сил, названных в вопросе № 5? На что действуют эти силы реакции? 16. Вы видите в комнате ожидания женщину, сидящую с ребенком на коленях. Стопы женщины не касаются пола. Не смотря на то, во что она одета, назовите все силы, необходимые для поддержания равновесия. 17. Взяв пример из вопроса 16, ответьте, что произойдет, если величина силы «пол-кресло» равна сумме веса женщины и ребенка? 18. Являются ли две силы пары «действие-противодействие» частями одной и той же линейной системы сил? Обоснуйте ответ. 19. Какие условия должны существовать, чтобы сила трения обладала размерностью в отношении предмета? 20. Когда величина силы трения всегда является наибольшей? 21. У вас пациент с ногой на вытяжке, аналогичный пациент в данной части I (вытяжка Бука). На веревке подвешен груз в 4,5 кг. Нога весит 9 кг. Предположим, что нога постели не касается. Будет ли этими силами вызвано раскрытие коленного сустава? 22. Повтор вопроса 21. Теперь предположим, что нога лежит на постели, и что коэффициент трения кожи о постель равен 0,25. Будет ли вызвано раскрытие коленного сустава? 23. Пациент лежит на постели с вытяжкой. На него действуют: сила тяжести, сила «постель-пациент» и сила «вытяжка-пациент». Пациент не находится в равновесии. Какие нужны дополнительные силы, чтобы пациент находился в равновесии? 24. Какой вид системы сил обнаруживается в одиночной мышце? Объясните. 25. В каком конце мышцы вы расположите точку приложения ОСм? 26. Как определить абсолютный эффект тяги двух мышц, прикрепленных в одной точке? Как называется этот процесс? 27. Как анатомические блоки влияют на величину и направление мышечной силы (ОСм)? 28. Какие три рода рычагов вы знаете? Приведите пример рычага каждого рода в организме человека. 29. Что такое вращающий момент? Опишите, как его определить, используя пример действия двух параллельных сил на один и тот же рычаг в теле человека. 30. Как определить, какая сила является силой действия (усилием), а какая — силой противодействия (сопротивлением)? 31. Какие факторы вызывают изменение вращающего момента? 32. Двухлетний ребенок не может открыть дверь в «Макдоналдс» (дверь открывается от себя). Что вы ему посоветуете, чтобы он справился с этим без посторонней помощи? 33. Что всегда справедливо в отношении механического преимущества рычага третьего рода? Второго рода? Первого рода? 34. В чем «преимущество» рычага с механическим преимуществом, большим, чем 1? 35. Какую работу (положительную или отрицательную) выполняет мышца, когда она действует как рычаг второго рода? Почему? 36. Используя данные значения, идентифицируйте род рычага, его механическое преимущество, какой вид сокращения выполняет мышца, и точку приложения равнодействующей сил «сила тяжести-предплечье» и «шар-предплечье» (кисть считаем как часть предплечья). Дано: ОСм = мышечная сила; СТ = «сила тяжести; предплечье»; ШП = «шар-предплечье» (допустим, что все силы действуют перпендикулярно предплечью). 37. Как определить вращающий момент, если силы, действующие на рычаг, не перпендикулярны по отношению к нему ипараллельны друг другу? 38. Опишите, какова связь угла приложения силы и ma этой силы. Когда ma потенциально будет максимальным? 39. Опишите, как бы вы расположили конечность в пространстве, чтобы сила тяжести создавала минимальный вращающий момент. Как расположить ее, чтобы вращающий момент оказался максимальным? 40. Как анатомические блоки влияют на вращающий момент, создаваемый мышцей, проходящей через блок? 41. Если мышечная сила участвует во вращении не полностью, что происходит с «потерянной» силой? 42. Опишите, как ротационная сила или компонент силы, действующие через сустав, могут создавать усилие смещения в этом суставе? Каковы вероятные источники сил, нейтрализующих эту силу смещения?
II. ПОСТУРОЛОГИЯ: ПОЗА, ОСАНКА
Задачи
После изучения настоящей главы читатель должен уметь: Описывать 1. Положения тазобедренного, коленного и голеностопного суставов при оптимальной вертикальной осанке. 2. Положение ЛТ при оптимальной осанке с использованием соответствующих точек отсчета. 3. «Диапазон раскачивания». 4. Площадь опоры. 5. Базовые элементы контроля позы, включающие в себя линии поведения: голеностопного сустава, тазобедренного сустава, головы и стратегию «шагнуть/схватиться». 6. ЦД (центр давления) тела и его связь с силой реакции опоры. 7. Гравитационные моменты, действующие на позвоночник, таз, тазобедренный, коленный и голеностопный суставы при оптимальной осанке. 8. Действия моментов на сегменты тела при оптимальной осанке. 9. Мышечные и связочные структуры, уравновешивающие моменты при оптимальной осанке. 10. Следующие нарушения осанки: pes рlаnus, hallux valgus, pes cavus, наклон головы вперед, genu varum и genu valgum, кифоз, лордоз и идиопатический сколиоз. 11. Влияние вышеуказанных нарушений осанки на структуры тела, такие, как связки, суставы и мышцы. 12. Влияние возраста на осанку.Объяснять 1. Каким образом следующие нарушения осанки влияют либо на величину, либо на направление гравитационных моментов: genu valgum, наклон головы вперед, genu recurvatum, кифоз и сколиоз. 2. Как изменения регулировки влияют на опорные структуры, такие, как связки, суставные капсулы, мышцы, различные суставные структуры и суставные поверхности.
Введение
В предшествующих главах говорилось об основных понятиях биомеханики, описывались движения, проводился анализ сил. Принципы биомеханики и знание физиологии мышц применялись к разным сегментам тела, чтобы улучшить понимание функции мышц и суставов. В этой части основной задачей является раскрытие того, каким образом различные структуры тела интегрируются в систему рычагов, которые дают возможность всему телу эффективно функционировать. С позиции системно-структурного подхода и теории структурности биомеханика рассматривает двигательные действия как системы, состоящие из иерархически соподчиненных подсистем низшего порядка. Система в целом и ее подсистемы имеют свои структуры. В двигательных действиях как системах выделяют пространственные, временные и динамические образующие элементы, представляющие собой состав системы, ее сопоставляющие части, а также системообразующие связи, которые отражают взаимодействие и субординации (соподчиненность) образующих систему элементов. Системообразующие связи составляют структуру системы. Образующие элементы системы движений в двигательном действии обеспечивают решение определенной двигательной задачи и имеют свои отличительные особенности — характеристики и их меры. В системе движений пространственные, временные и динамические элементы объединяются в подсистемы высшего порядка и системы. Пространственные образующие элементы — это положения тела, позы и суставные движения, которые обеспечивают решение простой двигательной задачи. Положения тела определяют по взаимному расположению линии отсчета, проведенной на теле (линия, соединяющая проекции головок плечевой и тазобедренной костей), и осей системы прямоугольных координат в инерциальной системе отсчета, т. е. по отношению к линии горизонта. Положения тела разделяют на вертикальные: стойки (основная ось на лопатках, на голове и руках), висы и упоры; горизонтальные (лежа на животе, на спине горизонтальные равновесия); наклонные (упор, лежа сзади, наклонный выпад и др.). Позу тела определяют по взаимному расположению его биозвеньев относительно друг друга в соматической системе отсчета. Различают позы: прогнувшись; согнувшись; в группировке; широкая стойка ноги врозь; выпад с наклоном; основная стойка руки в стороны, вперед, на пояс и др. Некоторые физические упражнения исполняются без изменения положения и позы при произвольном сохранении неподвижного состояния тела в соматической системе отсчета (стойка в прямолинейном движении при спусках на лыжах, равновесия, положение тела при спрыгивании с высоты и др.). При исполнении большинства физических упражнений положение тела и позы непрерывно изменяются. При этом только положения при сохранении заданной позы (прямое тело при махе назад на перекладине, сохранение группировки акробатических кувырков и др.). Изменяется только поза при сохранении положения (приседание и вставание, ходьба, равномерный бег и др.); изменяются положения и позы (исполнение длинного кувырка; прыжок в высоту способами перекат, перекидной; подъем разгибом на брусьях; стартовый разгон и др.).Условия равновесия и ускорения костных рычагов Сохранение положения и движения звена как рычага зависит от соотношения противоположно действующих моментов сил. Когда противоположные относительно оси сустава моменты сил равны, звено либо сохраняет свое положение, либо продолжает движение с прежней скоростью (моменты сил уравновешены). Если же один из моментов сил больше другого, звено получает ускорение в направлении его действия. Момент движущих сил, преобладая над моментом тормозящих сил, придает звену положительное ускорение (в сторону движения). Момент тормозящих сил, если он преобладает, придает звену отрицательное ускорение, вызывает торможение звена. В реальных движениях моменты этих двух групп сил редко бывают равны, и поэтому движения обычно либо ускоренные (положительное ускорение, разгон звена), либо замедленные (отрицательное ускорение, торможение звена). Для сохранения положения звена в суставе, естественно, необходимо равенство моментов сил.
Глава 3 СТАТИЧЕСКАЯ И ДИНАМИЧЕСКАЯ ОСАНКА
Осанка может быть как статической, так и динамической. В статике тело и все его сегменты выровнены и удерживаются в определенных положениях. Примеры статической позы — положение, стоя на коленях, лежа и сидя. Динамическое положение тела подразумевает движение всего тела (или его сегментов) — ходьбу, бег, прыжки, броски и подъем тяжестей. Понимание статического положения формирует основу для понимания положения динамического. Итак, в этой части мы делаем акцент на осанку в статическом положении. Динамические положения, такие, как бег и ходьба, рассматриваются в части III «Биомеханика ходьбы». Изучение любой отдельной позы включает в себя: кинетический и кинематический анализ всех сегментов тела. Люди и все другие живые создания обладают способностью организации и реорганизации сегментов тела, что позволяет принимать самые разнообразные позы, однако поддержание вертикального положения тела на двух ногах уникально и присуще только человеку. Вертикальное положение тела позволяет людям использовать верхние конечности для выполнения больших и малых двигательных задач. Если верхние конечности заняты костылями, тростью, или другими вспомогательными устройствами, помогающими сохранять стоячее положение тела, этот важный, присущий только человеку, атрибут либо претерпевает серьезные изменения к худшему, либо пропадает вообще. Вертикальное положение тела на двух ногах освобождает наши верхние конечности, но, при сравнении с опорой на четыре конечности, видно, что вертикальная стойка имеет некоторые слабые стороны. Вертикальное положение тела создает дополнительную нагрузку на сердце, позвоночный столб, таз и нижние конечности, а также уменьшает устойчивость. При опоре на четыре конечности вес тела распределяется между верхними и нижними конечностями. У человека вес тела приходится только на нижние конечности. Площадь опоры (ПО) человека, определяемая областью, ограниченной сзади концами пяток, а спереди линией, соединяющей кончики больших пальцев стоп, существенно меньше, чем ПО животного, передвигающегося на четырех конечностях (рис. 3.1).Рис. 3.1. Площади опоры. Положения на четырех конечностях и двух ногах
Центр тяжести человека (ЦТ), который иногда рассматривают как центр массы тела, находится приблизительно на уровне второго крестцового сегмента, т. е. на довольно приличном расстоянии от ПО. Несмотря на неустойчивость, вызванную небольшой ПО и высоким ЦТ, поддержание равновесия в статическом вертикальном положении не требует больших затрат энергии в форме мышечных сокращений. Кости, суставы и связки могут создавать необходимые крутящие моменты для противодействия силе тяжести, а частые изменения положения тела способствуют улучшению венозного оттока.
3.1. Контроль осанки
Хотя для поддержания вертикального положения требуется минимальная мышечная активность, контроль осанки весьма сложен и является частью контрольной двигательной системы тела. Аспекты двигательного контроля не являются основным содержанием данной книги, но при этом рассмотреть некоторые моменты контроля осанки необходимо для лучшего понимания того, что, собственно говоря, представляет из себя осанка. Контроль осанки, или постуральный контроль, может быть либо статическим, либо динамическим. Он подразумевает способность человека к поддержанию устойчивого положения тела и его сегментов в ответ на действие сил, которые угрожают нарушить структурное равновесие тела. По мнению Horak, способность сохранять устойчивость при вертикальном положении тела является навыком, который ЦНС приобретает по мере получения информации от пассивных биомеханических элементов, сенсорных систем и мышц. ЦНС интерпретирует и организует входные сигналы от различных структур и систем и выбирает реакции, основанные на предшествующем опыте, и собственно цели реакции. Реактивные (компенсаторные) ответы возникают как реакции на внешние силы, перемещающие ЦТ тела. Упреждающие (заблаговременные) ответы возникают в предвидении действия внутренних дестабилизирующих сил, таких, например, как поднятие руки при ловле мяча, или наклон, чтобы зашнуровать ботинки. Главные задачи и основные элементы контроля. Главными задачами постурального контроля в вертикальном положении являются: ориентация тела в пространстве, поддержание ЦТ тела над ПО и стабилизация головы по вертикали, позволяющая сохранять правильную ориентацию взгляда. По мнению DiFabio, стабилизация головы по вертикали является вообще основной целью постуральной регуляции. Поддержание и контроль осанки зависит от целостности ЦНС, зрительной системы, вестибулярной системы и скелетно-мышечной системы. Кроме этого, постуральный контроль зависит от информации, поступающей от рецепторов, расположенных внутри и вокруг суставов (в суставных капсулах, сухожилиях и связках), а также — на подошвенной части стоп. ЦНС должна уметь распознавать и предвидеть неустойчивость и отвечать на все варианты входных сигналов соответствующими выходными сигналами, тем самым сохраняя равновесие тела. Более того, суставы в скелетно-мышечной системе должны обладать такой амплитудой движения (АД), которая была бы адекватна реагированию на специфические задачи, а мышцы должны уметь реагировать с соответствующей силой и скоростью. Отсутствующие или видоизмененные входные и выходные сигналы. При модификации или отсутствии входящих сигналов система контроля может реагировать на неполную или искаженную информацию, и тогда осанка человека нарушается, а устойчивость ухудшается. Изменение или отсутствие входных сигналов может наблюдаться или в отсутствие нормальной силы тяжести, например, в условиях невесомости в космосе, либо в случае снижения чувствительности в нижних конечностях. * * *
ПРИМЕР 1. Осанка членов экипажа американского космического корабля «Дискавери» (июнь, 1985) при вертикальном положении тела после приземления существенно отличалась от фиксированной позы до полета. При этом и в космосе, и непосредственно после приземления космонавты могли стоять прямо. Когда стопы космонавта закреплялись на опоре во время полета и сразу же после приземления, он принимал такую позицию, при которой шея, тазобедренный и коленный суставы были согнуты значительно больше, чем до полета. Наблюдаемые изменения осанки связывают с модификацией тактильной, суставной и проприоцептивной сигнализации.* * * В последующем исследовании постуральной неустойчивости, наблюдаемой у космонавтов после возвращения на Землю, авторы пришли к выводу, что у космонавтов наблюдались значительные изменения многосуставной координации. Авторы относят эти изменения на счет изменения доли вестибулярного входа в условиях пониженной гравитации, что и привело к последующим изменениям контроля осанки. Более известный пример модификации входного сигнала — когда человек пытается встать и удержать равновесие, после того как он «отлежал ногу». Попытка встать может закончиться падением, поскольку входные сигналы, характеризующие положение стопы и голеностопного сустава, а также информация о контакте с опорой от этой стопы, попросту отсутствуют. Другим вариантом искажения входных сигналов могут быть последствия травмы. Нарушение кинестетического чувства в голеностопном суставе и стопе после растяжения голеностопа является причиной ухудшенного равновесия и потери устойчивости. Forkin с коллегами при исследовании гимнастов через 1-12 месяцев после растяжения голеностопа обнаружили: что после травмы спортсмены хуже распознавали пассивную АД в ранее травмированном суставе, чем в здоровом. Гимнасты говорили им также, что в положении стоя они чувствуют себя менее устойчиво, чем до травмы. Bernier и Perrin также выделили группу мужчин и женщин с хронической функциональной неустойчивостью после растяжения связок голеностопа. Кроме модификации входных сигналов, на способность человека поддерживать вертикальное положение тела могут влиять модифицированные выходные сигналы, такие как неспособность мышц к соответствующей реакции на сигналы от ЦНС. Например, мышцы человека с повреждением периферических нервов могут быть полностью или частично парализованы и неспособны реагировать. У людей пожилого возраста мышцы, атрофировавшиеся от бездеятельности, могут оказываться неспособны реагировать с адекватным усилием и создавать противодействие. У лиц с нервно-мышечными расстройствами могут одновременно реагировать как агонисты, так и антагонисты, что также снижает эффективность ответа. Совместные мышечные усилия. Исследователи постурального контроля предположили, что для выполнения конкретной задачи могут активироваться несколько различных сочетаний мышц. Нормально функционирующая ЦНС для выполнения задачи подбирает соответствующую комбинацию мышц, основанную на анализе сенсорных входных сигналов. Dietz считает, что афферентный вход от сухожильных органов Гольджи в разгибателях ноги, изменяется в зависимости от того, как ЦТ тела проецируется по отношению к стопам. Различия прошлого опыта и привычные паттерны мышечной активности также будут оказывать влияние на ответ. Allum с сотр. предполагают, что проприоцептивный входной сигнал от тазобедренного сустава или туловища может быть важнее для сигнализации и инициирования реакций. По мнению этих авторов, активация мышц основана прежде всего на входной сигнализации от проприоцепторов тазобедренного сустава и туловища. Второй уровень входа включает в себя сигналы от вестибулярной системы и проприоцептивный вход от всех сегментов тела. Для исследования постуральных реакций при нарушениях вертикальной постуральной устойчивости используют мониторинг мышечной активности при помощи ЭМГ и определение максимальных значений мышечных крутящих моментов и выходной мощности. Нарушением, или возмущением, считается любое внезапное изменение условий, которое выводит тело из равновесия. Оно может быть сенсорным или механическим. Сенсорное возмущение может быть вызвано изменением визуального входа, как, например, происходит, если человеку неожиданно закрыть глаза. К механическим возмущениям относятся перемещения, подразумевающие непосредственные изменения отношений ЦТ и ПО. Такие перемещения могут вызываться движениями как сегментов тела, так и тела целиком. Одним из методов экспериментального создания механических возмущений является размещение испытуемого на подвижной платформе. Платформа может двигаться вперед и назад, или из стороны в сторону. Некоторые платформы могут наклониться, и скорость их движения может меняться. Постуральные ответы на возмущения, вызываемые либо движением платформы, либо толчками являются реактивными или компенсаторными в том смысле, что это непроизвольные реакции. Эти постуральные реакции в литературе обычно называют либо синергиями, либо стратегиями. Соответственно, в нашей работе эти термины будут взаимозаменяемыми. Синергии зависят от задачи и варьируют в зависимости от массы факторов, таких как количество и направление движения опорной поверхности, расположение, величина и скорость возмущающей силы, начального положения человека во время возмущения. Синергии с фиксированной опорой. Horak с помощниками описывают синергии, как паттерны мышечной активности с центральной организацией, наблюдаемые при реакции на нарушения вертикального положения стоя. Синергии с фиксированной опорой — это паттерны мышечной активности, при которых ПО при нарушении и восстановлении равновесия остается фиксированной. Устойчивость достигается движениями частей тела, но стопы при этом остаются фиксированными на ПО. Двумя примерами синергий с фиксированной опорой являются синергия голеностопного сустава и синергия тазобедренного сустава. Синергия голеностопного сустава состоит из дискретных вспышек мышечной активности либо на передней, либо на задней стороне тела (в зависимости от направления движения платформы), которая идет по типу «от дальнего к ближнему». Движение платформы вперед вызывает относительное смещение линии направления силы тяжести в заднем направлении (рис. 3.2,а). Мышцы стараются вернуть линию силы тяжести (ЛСТ) в положение над ПО. Вспышки мышечной активности наблюдаются в тыльных сгибателях голеностопного сустава, сгибателях бедра, мышцах живота, мышцах спины и сгибателях шеи. Передние большеберцовые мышцы помогают восстановить устойчивость за счет тяги большой берцовой кости вперед (реверсивное мышечное действие), соответственно, они тянут вперед и тело, и линия действия силы тяжести остается или возвращается в позицию в пределах ПО (см. рис. 3.2,b).
Рис. 3.2. Нарушение равновесия в положении стоя при помощи движения горизонтальной платформы вперед, вызывающее: а — движение тела назад и вследствие этого смещение центра тяжести (ЦТ) тела кзади от площади опоры (ПО); b — использование стратегии голеностопного сустава (активация тыльных сгибателей, сгибателей бедра, мышц живота и сгибателей шеи), возвращающее ЦТ на место над ПО и восстанавливающее устойчивость…
Движение платформы назад вызывает относительное смещение ЛСТ кпереди. Мышцы реагируют, стараясь восстановить ЛСТ в положении в пределах ПО (рис. 3.3,а). Вспышки активности в подошвенных сгибателях, разгибателях бедра, туловища и шеи используются для восстановления ЛСТ в пределах площади опоры (рис. 3.3,b).
Рис. 3.3. Нарушение равновесия при движении горизонтальной платформы назад, вызывающее: а — движение тела вперед и, вследствие этого, смещение центра тяжести (ЦТ) тела кпереди от площади опоры (ПО); b — использование стратегии голеностопного сустава (активация подошвенных сгибателей, разгибателей бедра, разгибателей спины и шеи), возвращающее ЦТ на место над ПО и восстанавливающее устойчивость
Синергия тазобедренного сустава состоит из дискретных вспышек мышечной активности со стороны тела, противоположной паттерну голеностопного сустава. Эта активность идет по типу активации «от ближнего к дальнему». Maki и Mcilroy считают, что синергия тазобедренного сустава при фиксированной опоре может использоваться, главным образом, в ситуациях, когда нельзя применять стратегии с переменной опорой (синергии шага или захвата). Стратегии с переменной опорой. Стратегии с переменной опорой включают в себя шаг (вперед, назад или в сторону) и хватание (использование руки, чтобы схватиться за перекладину или другую закрепленную опору) в ответ на движение платформы. Шаг и хватание отличаются от синергий с фиксированной опорой, поскольку движения шага/хватания перемещают или увеличивают ПО так, что она остается под ЦТ тела (рис. 3.4).
Рис. 3.4. Нарушение равновесия при движении платформы назад, человек, чтобы не упасть вперед, использует стратегию шага. Шаг вперед переносит ЦТ тела на новую площадь опоры
Ранее полагали, что шаговая синергия используется только как средство последней надежды, которое инициировалось, если стратегии тазобедренного и голеностопного суставов оказывались недостаточными для выведения и удержания ЦТ над площадью опоры. Однако Maki и Mcilroy считают, что стратегии с переменной опорой являются нормальными реакциями на возмущения как у людей молодых, так и пожилых. Более того, эти авторы заметили, что эти стратегии являются единственными успешными действиями для сохранения равновесия при сильных возмущениях. Сравнение шаговой стратегии у молодых и пожилых людей показало, что молодые испытуемые обычно делают только один шаг, тогда как пожилым приходится делать несколько, причем шаги эти короче, а подъем ноги — ниже, чем у молодых людей. Однако в скорости реализации шаговой стратегии явных различий между молодыми и пожилыми людьми не обнаружено. Luchies и сотрудники обнаружили, что пожилые люди поднимали ногу с такой же скоростью, как и молодые. Стратегии стабилизации головы. В недавнее время DiFabio и Emasithi описали две стратегии стабилизации головы. Эти превентивные стратегии отличаются от ранее описанных реактивных стратегий, так как действуют в преддверии генерируемых изнутри сил. Более того, стратегии головы используются для поддержки головы во время устойчивого движения тела, такого, как ходьба, тогда как ранее описанные стратегии используются для поддержания тела в положении статического равновесия. Авторы описывают следующие две стратегии сохранения вертикальной устойчивости головы: стабилизация головы в пространстве (СГП) и стабилизация головы на туловище (СГТ). Стратегия СГП является модификацией положения головы в предвидении перемещений ЦТ тела. Опережающие настройки положения головы независимы от движений туловища. Стратегия СГТ является одной из стратегий, при которых голова и туловище движутся как единое целое.
Глава 4 КИНЕМАТИКА И КИНЕТИКА ОСАНКИ
Паттерны мышечной активности, наблюдаемые как ответ на возмущение, используются для противодействия силам, которые изменяют равновесие тела в положении стоя. В данном разделе рассматриваются действия как внешних, так и внутренних сил на тело и его сегменты, что дает возможность понять, как сохраняются статические положения тела. Внешние силы, которые мы будем рассматривать, следующие: инерция, гравитация и сила реакции опоры (СРО). Внутренние силы связаны с мышечной деятельностью и пассивным натяжением связок, сухожилий, капсул суставов и других мягких тканей. В соответствии с определением равновесия, приведенным в ч. I, чтобы тело находилось в равновесии, внешние и внутренние силы должны быть сбалансированы, и сумма все сил и крутящих моментов, действующих на тело и его сегменты, должна быть равна нулю. Тело старается достичь и сохранить состояние равновесия в положении стоя при помощи минимальных затрат энергии: оно старается удержать ЦТ тела над ПО, а голову — в таком положении, чтобы взгляд был правильно направлен.4.1. Сила инерции и сила тяжести
В целом силой инерции в статических позах можно пренебречь, поскольку ускорение или ничтожно мало, или отсутствует вообще, за исключением постуральных колебаний. В положении стоя тело всегда выполняет колебательные движения, называемые постуральными колебаниями или «колебательным конвертом». Диапазон такого конверта при нормальном положении стоя и расстоянии между стопами около 10,16 см, может быть до 12° в сагиттальной плоскости и до 16° во фронтальной плоскости. Инерционные силы, которые могут возникнуть при этих колебаниях, при анализе сил, действующих в статических положениях, обычно не рассматривают. Однако динамические силы надо учитывать при анализе всех динамических положений тела, таких как ходьба, бег и бег трусцой. Сила тяжести действует книзу от ЦТ тела. В статическом положении стоя вертикальная проекция ЦТ тела (ЛСТ) находится в пределах ПО, которая обычно является пространством, ограниченным двумя стопами (см. рис. 3.1). В динамических положениях, таких, как ходьба и бег, проекция ЛСТ находится за пределами стоп в течение значительного времени, что делает тело неустойчивым во время выполнения всей этой части двигательной задачи. При статическом положении стоя проекция ЛСТ должна находиться в пределах ПО, тогда тело будет в равновесии.
4.2. Силы реакции опоры
В любой момент, когда тело осуществляет контакт с опорой (почвой), опора отталкивает его обратно. Эта сила известна как сила реакции опоры (СРО). СРО является результирующей силой, обычно состоящей из трех компонентов: вертикального силового компонента и двух горизонтальных силовых компонентов. Одна из двух горизонтальных сил действует в медиальном/латеральном направлении, другая — в переднезаднем направлении. Вектор (результирующей) силы реакции опоры (ВСРО) в положении стоя по величине равен силе тяжести, но противоположен ей по направлению. ВСРО указывает на величину и направление силы, действующей на стопу. Точкой приложения ВСРО в теле является центр давления (ЦД), который при стойке на одной ноге находится в стопе и между стопами при стойке на двух ногах. Если человек выполняет стойку на руках, ЦД будет находиться между кистями. ЦД, как и ЦТ, является теоретической точкой, в которой, как считается, действует сила, хотя на поверхность тела, находящуюся в контакте с опорой, могут действовать силы практически по всей контактной поверхности. Траекторию ЦД, которая определяет степень колебательного конверта, можно определить графиком ЦД с равными интервалами. Человек при этом стоит на тензометрической платформе (рис. 4.1).
Рис. 4.1. Траектория центра давления при вертикальной осанке: a — график движения ЦТ человека, стоящего на тензометрической платформе. Прямоугольник представляет собой контур тензометрической платформы. Траектория показывает нормальный ритмический переднезадний «конверт колебаний» во время удержания положения стоя в течение примерно 30 с; b — траектория ЦТ показывает относительно бесконтрольные постуральные колебания
ВСРО и ЛСТ в положении стоя обладают совпадающими линиями действия. На рис. 2.19 (часть I) ВСРО и ЛСТ являются частью одной и той же системы линейных сил. Во многих динамических состояниях пересечение ЛСТ с опорной поверхностью может не совпадать с точкой приложения ВСРО. Горизонтальное расстояние между точкой на поверхности опоры, где ЛСТ пересекается с опорой, и ЦТ (где действует ВСРО) указывает на величину момента, которому надо противодействовать для того, чтобы сохранить позу и удержать человека от падения. Технология, требуемая для исследования СРО, ЦД и мышечной активности, является дорогостоящей, и может быть недоступна среднему исследователю функций человека. Таким образом, далее будет представлен упрощенный метод анализа осанки и позы при помощи диаграмм, и сопряженного действия ЛСТ и ВСРО, взятого в качестве эталона.
4.3. Совпадающие линии действия
При идеальной вертикальной осанке сегменты тела выровнены так, чтобы крутящие моменты и нагрузки на сегменты тела минимизированы, и осанку можно поддерживать с минимальными затратами энергии. Совпадающие линии действия, образованные ВСРО и ЛСТ, служат эталонными отметками для анализа действия этих сил на сегменты тела (рис. 4.2).
Рис. 4.2. Расположение совпадающих линий действия, образованных вектором силы реакции опоры и линии силы тяжести при оптимальном положении стоя
Когда ЛСТ и ВСРО совпадают, как это наблюдается при статическом положении, мы можем оценивать действия в каждом суставе, используя одну, или другую. ЛСТ мы будем использовать в оставшейся части главы. Расположение ЛСТ постоянно меняется (соответственно, и ЦД) по причине постуральных колебаний. В результате постоянных движений ЛСТ моменты, действующие вокруг суставов, постоянно меняются. Рецепторы в суставах сегментов тела и вокруг них, а также на подошвах, распознают эти изменения и передают эту информацию в ЦНС. ЦНС анализирует входные сигналы и, в нормальных условиях, выдает соответствующий ответ для поддержания постуральной стабильности.
4.4. Сагиттальная плоскость
Действие сил на сегменты тела в сагиттальной плоскости определяется расположением ЛСТ относительно осей движения сегментов тела. Когда ЛСТ проходит непосредственно через ось сустава, вокруг него не создается гравитационного крутящего момента. Однако если ЛСТ проходит на расстоянии от оси, создается крутящий момент силы тяжести. Этот момент вызывает ротацию суперпозиционных сегментов тела вокруг оси этого сустава, которой противодействует уравновешивающий крутящий момент. Величина крутящего момента силы возрастает с увеличением расстояния между ЛСТ и осью сустава. Направление гравитационного момента силы зависит от расположения линии силы тяжести относительно конкретной оси сустава. Если линия силы тяжести расположена спереди от оси сустава, крутящий момент будет стимулировать движение вперед проксимального сегмента тела, поддерживаемого этим суставом (рис. 4.3,а). Если линия силы тяжести проходит сзади от оси сустава, крутящий момент будет стимулировать движение проксимального сегмента в заднем направлении (рис. 4.3,b).
Рис. 4.3. Схематическое представление гравитационных моментов в нижних конечностях человека, стоящего справа от смотрящего. Гравитационный момент сдвигает проксимальный сегмент (бедренную кость): a — вперед, если ЛСТ проходит спереди от оси сустава; b — назад, если ЛСТ проходит сзади от оси сустава
При анализе осанки или позы, гравитационные моменты, создающие движение в сагиттальной плоскости, относятся либо к сгибанию, либо к разгибанию. * * *
ПРИМЕР 1. Если ЛСТ проходит спереди от оси голеностопного сустава, гравитационный момент силы будет направлен на ротацию большой берцовой кости (проксимальный сегмент) в переднем направлении (рис. 4.4). Переднее движение большой берцовой кости на согнутой стопе вызовет тыльное сгибание в голеностопном суставе. Соответственно, момент силы будет называться моментом тыльного сгибания.
Рис. 4.4. Переднее расположение ЛСТ относительно голеностопного сустава создает момент тыльного сгибания. Стрелка указывает на направление момента тыльного сгибания. Пунктирная линия — на направление, в котором большая берцовая кость будет двигаться, если моменту тыльного сгибания не оказывается противодействие
ПРИМЕР 2. Если ЛСТ проходит спереди от оси вращения коленного сустава, гравитационный момент силы будет вращать бедренную кость (проксимальный сегмент) в переднем направлении (рис. 4.5). Переднее движение бедренной кости вызовет разгибание колена. В этом случае момент силы будет моментом разгибания.
Рис. 4.5. Переднее расположение ЛСТ относительно коленного сустава создает момент разгибания. Стрелка указывает на направление момента разгибания. Пунктирная линия — на направление, в котором бедренная кость будет двигаться, если гравитационному моменту не оказывается противодействие
Глава 5 ОПТИМАЛЬНАЯ, ИЛИ ИДЕАЛЬНАЯ, ОСАНКА И ЕЕ АНАЛИЗ
Поскольку сила тяжести постоянно действует на тело, идеальной осанкой является такая, при которой все сегменты выровнены по вертикали, и ЛСТ проходит через оси всех суставов. Нормальное строение тела не позволяет достичь такой идеальной осанки, но можно выработать такую осанку, которая будет довольно близка к идеальной. При нормальной оптимальной осанке ЛСТ проходит вблизи большинства осей суставов, хоть и не проходя через них. Таким образом, при нормальной оптимальной осанке гравитационные моменты невелики и могут без труда уравновешиваться моментами противоположного направления, создаваемыми пассивным натяжением связок, пассивным натяжением мышц и минимальной мышечной активностью. Сегменты тела при оптимальной осанке выровнены или почти выровнены по вертикали, компрессионные силы оптимально распределены по поверхностям суставов, находящимся под нагрузкой; при этом нет излишнего растяжения связок и не требуется лишней мышечной деятельности. В нормальной популяции можно ожидать небольших отклонений от оптимальной осанки, поскольку само по себе строение тела имеет значительные индивидуальные отличия. Однако отклонения от идеальной осанки могут быть достаточно велики для того, чтобы создавать либо несбалансированные силы, действующие в области суставов, либо чтобы заставлять другие части тела компенсировать эти отклонения. Такие отклонения следует распознавать и предпринимать определенные действия по их коррекции. Если неправильная осанка становится привычной и повседневной, тело перестает распознавать такую ошибочную осанку как аномальную, и со временем начинаются структурные адаптации. Анализ осанки. Квалифицированный визуальный анализ осанки включает в себя идентификацию расположения сегментов тела относительно ЛСТ. Для определения ЛСТ используется отвес, т. е. бечевка или нитка с весом на одном конце. Проводящие оценку осанки врачи должны уметь визуально определять, отклоняется ли сегмент тела или сустав от нормального оптимального выравнивания. Сегменты тела по обе стороны от ЛСТ должны быть симметричны. Более сложный анализ проводится с использованием рентгенографии, фотографии, ЭМГ, электрогониометрии, тензометрических платформ, или трехмерного компьютерного анализа. Вместе с тем квалифицированный визуальный анализ дает большое количество информации без каких-либо сложных приборов с помощью одного лишь отвеса.5.1. Вид сбоку — оптимальное выравнивание в сагиттальной плоскости
Голеностопный сустав. При оптимальной осанке голеностопный сустав находится в нейтральном положении, т. е. посередине между тыльным и подошвенным сгибанием. ЛСТ проецируется чуть спереди от внешней лодыжки, т. е. кпереди от оси голеностопного сустава. Переднее положение ЛСТ относительно оси голеностопного сустава создает момент тыльного сгибания. При нейтральном положении сустава не имеется связочных ограничителей, способных к уравновешиванию момента тыльного сгибания, поэтому необходима мышечная активность подошвенных сгибателей для предотвращения движения большой берцовой кости вперед. Камбаловидная мышца действует реверсивно и тянет большую берцовую кость назад, противодействуя, таким образом, моменту тыльного сгибания (рис. 5.1).
Рис. 5.1. Момент разгибания, действующий в области коленного сустава. Сустав уравновешивается противоположным моментом, создаваемым пассивным натяжением задней части суставной капсулы. Момент тыльного сгибания уравновешивается активностью камбаловидной мышцы
Электромиографические исследования показали, что камбаловидная и икроножная мышцы у здоровых людей в положении стоя постоянно активны. Эта активность свидетельствует о том, что мышцы создают минимальный, но постоянный момент силы вокруг голеностопных суставов, тем самым, противодействуя гравитационному моменту тыльного сгибания. Мышцы голеностопного сустава, которые в положении стоя на ЭМГ активны не постоянно: передняя большеберцовая мышца, малоберцовые мышцы и задняя большеберцовая мышца. Основным действием этих мышц не является подошвенное сгибание. Вероятно, таким образом, что эти мышцы не столько противодействуют гравитационному моменту в голеностопном суставе, сколько помогают обеспечивать поперечную стабильность в стопе во время постуральных колебаний. Коленный сустав. Коленный сустав полностью разогнут, и ЛСТ проходит спереди от средней линии колена и сзади от коленной чашечки. Это выводит ее чуть кпереди от оси коленного сустава. Расположение ЛСТ спереди от оси создает момент разгибания. Пассивное натяжение задней части суставной капсулы и ассоциированных связок является достаточным для уравновешивания гравитационного момента и предотвращения гиперразгибания колена. При оптимальной осанке требуется лишь минимальная мышечная активность (или таковой не требуется вообще) для поддержания колена в состоянии разгибания. Однако некоторая активность была выявлена в мышцах задней поверхности бедра. Активность камбаловидной мышцы может увеличивать гравитационный момент разгибания колена за счет тяги большой берцовой кости назад (то, что она делает в голеностопном суставе). Активность икроножной мышцы, наоборот, может противодействовать гравитационному моменту разгибания, поскольку мышца пересекает коленный сустав сзади от его оси. Тазобедренный сустав и таз. По Kendall и Mc-Creary, при оптимальной осанке тазобедренный сустав находится в нейтральном положении, а таз — на одном уровне, без наклона вперед или назад (рис. 5.2,а). Когда таз находится в ровном положении, линии, соединяющие лонное сращение и передние верхние гребни подвздошных костей, вертикальны, а линии между передними и задними гребнями подвздошных костей — горизонтальны. В таком оптимальном положении ЛСТ проходит чуть спереди от оси тазобедренного сустава, через большой вертел. Заднее положение гравитационной линии относительно тазобедренного сустава создает в нем момент разгибания, который старается повернуть таз (проксимальный сегмент) на головках бедренной кости кзади (рис. 5.2,b).
Рис. 5.2. Положение ЛСТ относительно тазобедренного сустава: a — ЛСТ проходит через большой вертел и сзади от оси сустава; b — заднее положение гравитационной линии создает момент разгибания в суставе, стремящийся повернуть таз кзади на головках бедренных костей. Стрелки показывают направление действия гравитационного момента
Исследования при помощи ЭМГ показали наличие активности подвздошно-поясничной мышцы в положении стоя. Возможно, что активность этой мышцы создает балансировочный момент сгибания в тазобедренном суставе. Если позволить гравитационному моменту разгибания действовать без мышечного баланса, что происходит в так называемой стойке «вольно», или расслабленной стойке, гиперразгибание сустава ограничивается, в конечном счете, пассивным натяжением подвздошно-бедренной, лобково-бедренной и седалищно-бедренной связок. Расслабленная осанка не требует какой-либо мышечной активности в бедре, но вызывает увеличение нагрузки натяжения на передние связки бедра. Стойка «вольно» может также увеличивать гравитационный момент силы в других суставах тела. Пояснично-крестцовый и крестцово-подвздошный суставы. Оптимальный пояснично-крестцовый угол — около 30°. Наклон крестца вперед увеличивает угол и вызывает увеличение нагрузки смещения на пояснично-крестцовый сустав, в результате чего в положении стоя может возникнуть увеличение передней поясничной выпуклости (рис. 5.3,а). Вместе с тем характер взаимосвязи между наклоном крестца и поясничным лордозом считается весьма противоречивым. С одной стороны, Youdas и соавт. при исследовании 90 мужчин и женщин показали, что связь поясничного лордоза с наклоном крестца очень слаба. С другой стороны, Kosovessis с сотр., использовавшие рентгенологические оценки вертикального положения тела, обнаружили, что наклон крестца имеет сильную корреляцию, как с грудным кифозом, так и поясничным лордозом.
Рис. 5.3. Пояснично-крестцовый угол при оптимальной осанке равен примерно 30° (a). Гравитационный момент стремится вызвать переднюю ротацию верхней части крестца, соответственно нижняя его часть стремится отклониться кзади. Пассивное натяжение крестцово-бугорной связки препятствует заднему движению нижнего крестцового сегмента (b)
При идеальной осанке ЛСТ проходит через тело пятого поясничного позвонка, близко к оси вращения поясничнокрестцового сустава. Гравитация, таким образом, создает очень слабый момент разгибания в L5-St, который сдерживается передней продольной связкой. Когда крестец находится в оптимальном положении, ЛСТ проходит чуть спереди открестцовоподвздошных сочленений. Гравитационный момент, который создается в крестцово-подвздошных сочленениях, стремится повернуть переднюю верхнюю часть крестца вперед и вниз, тогда как задняя нижняя его часть поворачивается назад и вверх (рис. 5.3,b). Гравитационный момент уравновешивается натяжением крестцово-остистой и крестцово-бугорной связок, которые не дают нижней части крестца двигаться назад. Движение верхней части крестца вперед сдерживается крестцовоподвздошными связками. Позвоночник. Изгибы позвоночника должны представлять собой нормальную его конфигурацию. Когда изгибы позвоночника находятся в оптимальном положении, ЛСТ проходит через среднюю линию туловища (рис. 5.4).
Рис. 5.4. Положение ЛСТ относительно туловища
Положение ЛСТ относительно позвонков выше пятого поясничного позвонка довольно противоречиво. Cailliet говорит, что ЛСТ пересекает тела позвонков на уровне Т1 и Т12, а также в зубовидном отростке С2. Duval-Beaupre показал, при использовании рентгеновских обследований 17 молодых взрослых испытуемых, что ЛСТ проходила спереди от передних поверхностей Т8-Т10. По данным Bogduk, у многих людей ЛСТ проходит спереди от L4 и, таким образом, спереди от поясничной ости. В таких случаях будет наблюдаться момент сгибания, тянущий грудной и верхнюю часть поясничного отдела кпереди. Активность мышц, выпрямляющих позвоночник, необходима в таких случаях для противодействия моменту и сохранения равновесия тела. При использовании эталонной рамки Cailliet, ЛСТ будет проходить позади осей вращения шейных и поясничных позвонков, спереди от грудных позвонков и через тело пятого поясничного позвонка. В такой ситуации гравитационные моменты стремятся к увеличению естественной кривизны в поясничном, грудном и шейном отделах. Максимальный гравитационный момент наблюдается в верхушке каждого изгиба, в С5, Т8 и L3, поскольку именно эти позвонки наиболее удалены от ЛСТ. По мнению Kendall, при оптимальной осанке ЛСТ проходит через тела поясничных и шейных позвонков и спереди грудных. В этом случае наибольшая нагрузка на опорные структуры приходится на грудной отдел, в котором ЛСТ идет на расстоянии от позвонков. Нагрузка в поясничном и шейном отделах будет меньшей, поскольку ЛСТ в этих отделах проходит или через оси суставов, или рядом с ними. Электромиографические исследования, хоть и не подтверждают гипотезы Cailliet или Kendall, но показывают, что в нормальном положении стоя длиннейшая мышца спины, ротаторы и мышцы шеи дают вспышки перемежающейся активности. Эти данные говорят о том, что связочных структур и пассивного натяжения мышц может быть недостаточно для противодействия гравитационным моментам, действующим вокруг суставных осей позвоночника. В поясничном отделе, где мышечная активность минимальна, натяжения передней продольной связки и пассивного натяжения сгибателей туловища достаточно для балансировки гравитационного момента разгибания. Голова. Линия силы тяжести относительно головы проходит через наружные слуховые отверстия, позади венечного шва и через зубовидные отростки. Таким образом, ЛСТ проецируется чуть спереди от поперечной оси вращения при сгибании/разгибании головы и создает тем самым момент сгибания (рис. 5.5).
Рис. 5.5. Переднее положение ЛСТ относительно поперечной оси сгибания и разгибания головы создает момент сгибания
Гравитационный момент, тянущий голову вперед, сдерживается натяжением выйной связки, покровной мембраны, задних частей капсул зигапофизарных суставов и задним волокнами студенистого ядра, а также активностью разгибателей головы. При выполнении анализа осанки, отвес должен проходить через мочку уха, а голову следует держать точно над ЦТ тела в S2. Связи ЛСТ с различными сегментами тела при нормальном выравнивании в сагиттальной плоскости сведены в табл. 5.1.
Резюме
Колебательные движения, которые наблюдаются при нормальной осанке, меняют положение ЛСТ относительно осей отдельных суставов. Во время этих колебаний также меняется ЦД. Например, при качании вперед ЛСТ может сдвигаться от оптимального положения позади оси тазобедренного сустава к положению спереди от него (естественно, если колебательное движение достаточно выражено). ЦД сместится кпереди по направлению к пальцам стопы. С одной стороны, моменту сгибания, созданному изменением в положении ЛСТ, могут противодействовать короткие всплески активности разгибателей бедра, которые сдвигают ЛСТ и ЦД назад. С другой стороны, для того чтобы вернуть тело и, таким образом, ЛСТ обратно в положение позади оси тазобедренного сустава, может скорее использоваться всплеск активности в камбаловидных мышцах. Внезапное движение назад опорной поверхности вызывает аналогичное, но большее по силе и амплитуде движение ЛСТ, когда тело начинает падать вперед. В голове, шее, шейном, грудном, поясничном отделах позвоночника, тазобедренном и голеностопном суставах, создаются моменты сгибания. Для противодействия этим моментам вынуждены сокращаться разгибатели шеи, спины, бедра и подошвенные сгибатели голеностопного сустава. ЦНС отвечает активацией мышц или мышечным паттерном, который оказывает противодействие моментам инерции и сгибания, возвращает ЛСТ к ЦТ и восстанавливает статическое вертикальное равновесие. Эти реакции могут содержать в себе как стратегии фиксированной опоры, так и переменной опоры, описанные в первой части главы.
5.2. Вид сбоку — отклонения от оптимального выравнивания
Одной из основных целей любой позы является минимизация расхода энергии и нагрузки на опорные структуры. Любое изменение позиции или нарушение ориентации одного сегмента вызовет изменения в смежных сегментах равно как и изменения в других сегментах, поскольку тело старается приспособиться или скомпенсировать это нарушение ориентации (реакция по закрытой цепи, направленная на сохранение положения головы над крестцом). Изменения оптимальной ориентации увеличивают нагрузку или силу, действующую на единицу площади структуры тела. Если стресс сохраняется в течение длительного времени, структуры тела могут начать видоизменяться. Мышцы, если их долго удерживать в укороченном положении, могут начать терять саркомеры. Такое адаптивное укорочение может акцентировать и закреплять аномальную осанку, а также препятствовать развитию полной АД. При сохранении в удлиненном состоянии в мышцах может происходить увеличение числа саркомеров, в результате чего будет меняться отношение «длина мышцы/натяжение». Укорочение связок ограничивает нормальную АД, тогда как растягивание связочных структур снижает способность связок к достаточному натяжению для стабилизации и защиты суставов. Продолжительные весовые нагрузки на поверхности суставов увеличивают деформацию хрящей и могут нарушить их питание. В результате поверхности суставов могут оказаться подвержены ранним дегенеративным изменениям. Следующие примеры показывают, насколько отклонение от нормальной ориентации одного или двух сегментов тела увеличивает расход энергии, требуемой для поддержания обычной вертикальной позы. Постуральные проблемы могут начаться в любой части тела и создавать повышенные нагрузки и напряжения по всей скелетно-мышечной системе. Осанка, которая является попыткой либо улучшения функции, либо нормализации внешнего вида, называется компенсаторной. Соответственно, исследователь осанки должен не только идентифицировать отклонение, но определить его причину, компенсаторную осанку, и возможные последствия отклонения для костей, суставов, связок и мышц, поддерживающих затронутые структуры.
Стопа и пальцы Когтеобразные пальцы. Когтеобразные пальцы — это деформация пальцев стопы, характеризующаяся гиперразгибанием в плюснефаланговых суставах (ПФС) в сочетании со сгибанием проксимальных (ПМС) и дистальных (ДМС) межфаланговых суставов. Иногда может наблюдаться подвывих проксимальной фаланги на головке плюсневой кости (рис. 5.6,а). В дорсальной части согнутых фаланг могут возникать костные мозоли.
Рис. 5.6. Когтеобразный и молоткообразный палец стопы: а — рисунок когтеобразного пальца показывает гиперразгибание в плюснефаланговом суставе (ПФС) и сгибание в межфаланговых суставах (МФС). Аномальное распределение веса может привести к образованию костной мозоли либо под головками плюсневых костей, либо под концом дистальной фаланги. К образованию костной мозоли может также приводить аномальное давление между верхними поверхностями согнутых МФС и стелькой ботинка; b — молоткообразные пальцы характеризуются гиперразгибанием в ПФС и дистальном межфаланговом суставе и сгибанием в проксимальном межфаланговом суставе (ПМС). Образование костной мозоли вызывается давлением, оказываемым обувью, на верхнюю поверхность ПМС
Вот некоторые из многих предлагаемых этиологий этого состояния: тесная обувь, впалая стопа, мышечный дисбаланс, неэффективность собственных мышц стопы, нервно-мышечные расстройства, возрастные изменения структур стопы. Valmassey считает, что когтеобразные и молоткообразные пальцы — на самом деле явления одного порядка, с одним только исключением: когтеобразные пальцы — это деформация, которая захватывает все пальцы, с большого по мизинец, а молоткообразные пальцы обычно наблюдаются только на первых двух. Молоткообразный палец. В целом молоткообразный палец — это деформация, которая характеризуется гиперразгибанием ПФС, сгибанием ПМС и гиперразгибанием ДМС. Мозоли (болезненные утолщения эпидермиса) могут обнаруживаться на верхней поверхности ПМС, над головками первых фаланг и быть вызваны давлением обуви, или на кончиках дистальных фаланг, и быть связаны с неправильным распределением веса. Мышцы-сгибатели растянуты над ПФС и укорочены в МФС. Если длинные и короткие разгибатели пальца и червеобразные мышцы селективно парализованы, внутренние и внешние сгибатели пальца действуют без противодействия, изгибают ДМС и ПМС и, таким образом, приводят к молоткообразной деформации.
Коленный сустав Осанка с согнутыми коленями. Если человек стоит с согнутыми коленями, ЛСТ проходит позади осей коленных суставов. Заднее положение ЛСТ создает момент сгибания в коленных суставах, который, для поддержания вертикального положения, должен быть уравновешен действием четырехглавых мышц бедра. Сила четырехглавых мышц, требуемая для сохранения равновесия в коленном суставе, увеличивается от нуля при разогнутом колене до 22 % от максимального произвольного сокращения (МПС) при сгибании колена в 15°. При сгибании колена от 15 до 30° требуется быстрое увеличение силы четырехглавой мышцы. Когда колено достигает сгибания в 30°, требуемое усилие четырехглавой мышцы возрастает до 51 % от МПС. Увеличение мышечной активности, необходимое для поддержания позы с согнутыми коленями, подвергает большеберцово-бедренный и надколенно-бедренный суставы большей, чем в норме, компрессионной нагрузке. Другие последствия положения с согнутыми коленями уже относятся к голеностопному и тазобедренному суставам. Поскольку сгибание колена в вертикальной стойке сопровождается сгибанием в тазобедренном суставе и тыльным сгибанием голеностопного сустава, положение ЛСТ будет, по отношению к осям этих суставов, также изменяться. В тазобедренных суставах ЛСТ будет проходить спереди от суставных осей. Для балансировки гравитационного момента сгибания может потребоваться активность разгибателей бедра. Для противодействия увеличенному моменту тыльного сгибания в голеностопном суставе может потребоваться повышенная активность камбаловидной мышцы (рис. 5.7).
Рис. 5.7. Гравитационные моменты при стойке с согнутыми коленями. Моменты сгибания действуют вокруг тазобедренного и коленного суставов, а момент тыльного сгибания — в голеностопном суставе
Дополнительная мышечная активность подвергает тазобедренный и голеностопный сустав повышенным компрессионным нагрузкам. Кроме того, увеличенные потребности в деятельности четырехглавой, икроножной, камбаловидной мышц и, возможно, разгибателей бедра вызывают и увеличение энергетических запросов для поддержания позы. Однако если жесткость мышц или суставных структур снижает потребность в активных мышечных сокращениях, гипотетическое увеличение расхода энергии, вызванного таким положением тела, может оказаться несколько переоцененным. Осанка с переразгибанием колена (Genu Recurvatum). Осанка с переразгибанием колена (рис. 5.8) вызывает существенное смещение ЛСТ вперед от оси коленного сустава.
Рис. 5.8. При стойке с гиперразогнутым коленом передняя часть коленного сустава подвержена аномальной компрессионной нагрузке, а задняя — аномальному растяжению. Отметим ограничение тыльного сгибания в голеностопном суставе
Переднее положение ЛСТ вызывает увеличение гравитационного момента разгибания, действующего в колене, который увеличивает отклонение гиперразгибания и создает в задней части капсулы коленного сустава существенную нагрузку натяжения. Привычка к подобной осанке является, вероятно, результатом адаптивного удлинения задней части капсулы. Передние суставные поверхности на мыщелках бедренной кости, и передняя часть площадок большой берцовой кости подвергаются аномальной компрессии, и в них могут начать развиваться дегенеративные изменения хрящевых поверхностей. Отношение «длина-натяжение» передних и задних мышц также может меняться, и мышцы могут оказаться неспособны развить силу, необходимую для обеспечения адекватной стабильности и подвижности сустава. Гиперразгибание в колене обычно вызвано ограничением тыльного сгибания в голеностопном суставе или слишком большим подошвенным сгибанием в голеностопном суставе, называемым «equinus». Оно может быть также результатом привычек, сформировавшихся в детстве, когда дети или подростки стоят с переразогнутыми тазобедренными и коленными суставами.
Таз Избыточный наклон таза вперед. При осанке, когда таз слишком наклоняется вперед, нижние поясничные позвонки тоже тянет кпереди. Верхние поясничные позвонки идут назад, чтобы удержать голову в положении над крестцом, увеличивая тем самым поясничный лордоз. ЛСТ при этом проходит на большем расстоянии от осей поясничных позвонков, чем следует, и в поясничном отделе позвоночника увеличивается момент разгибания. Одновременно для балансировки поясничного лордоза увеличивается кифоз в грудном отделе, который также помогает удерживать голову над крестцом. Аналогичным образом и с той же целью растет кривизна лордоза в шейном отделе (рис. 5.9).
Рис. 5.9. Излишний наклон таза вперед влечет а собой увеличение поясничного лордоза. Для его компенсации увеличивается кифоз в грудном отделе и лордоз в шейном отделе
В табл. 5.2 приведены изменения, которые могут возникнуть в результате излишнего переднего наклона таза.
При оптимальной осанке поясничные диски испытывают натяжение спереди и компрессию сзади. При увеличении лордоза в поясничном отделе усиливается диффузия питательных веществ в передние части диска, которая и в норме больше, чем в задней части. В задней же части, в силу усиленной компрессии, проникновение питательных веществ еще более затрудняется. Избыточные компрессионные усилия могут испытывать и зигапофизарные суставы.
Позвоночник Лордоз. Термин «лордоз» относится к аномальному увеличению обычной передней выпуклости в поясничном или шейном отделе позвоночника. Как говорилось в тексте выше (см. «Избыточный наклон таза вперед»), посвященном избыточному наклону таза вперед, увеличение поясничного изгиба может сопровождаться компенсаторным увеличением как шейного лордоза, так и грудного кифоза. Кифоз. Термин «кифоз» относится к аномальному увеличению нормальной выпуклости грудного отдела позвоночника в заднем направлении. Иногда кифоз может развиваться как компенсация поясничного лордоза (см. рис. 5.9), а может развиваться как результат привычной плохой осанки. Такие заболевания, как туберкулез или анкилозирующий спондилит (спондилез), также могут вызывать увеличение грудного кифоза. Например, такая деформация, как горб, может возникнуть в результате туберкулеза, который вызывает повреждения позвонков. Эта деформация легко распознается собственно по горбу, который образует острое угловое выпячивание в верхней части грудного отдела позвоночника. Горб Dowagera — еще легко распознаваемое кифозное состояние, которое чаще всего обнаруживается у страдавших остеопорозом женщин в период после менопаузы. Передняя часть нескольких позвонков оседает вследствие остеопорозного ослабления. Оседание тела позвонка тут же вызывает дефицит передней опоры позвоночника, который сгибается вперед, тем самым увеличивая грудной кифоз (горб) и, соответственно, увеличение сжатия передних частей тел позвонков.
Голова Осанка с выдвинутой вперед головой. Осанка с выдвижением головы вперед — это такое положение, при котором голова выдвигается кпереди, удаляется от линии силы тяжести, нормальный шейный лордоз увеличивается, и верхушка кривой находится на значительном расстоянии от ЛСТ (рис. 5.10).
Рис. 5.10. Осанка с выдвинутой вперед головой: а — наблюдается увеличение шейного и поясничного лордоза выше нормы. В грудном отделе видно увеличение кифоза. Вставка указывает, как увеличение лордозного изгиба в шейном отделе создает сзади компрессионные усилия и сужает межпозвонковое отверстие; b — выдвижение плеч вперед (медиальная ротация рук), часто сопровождающее осанку с выдвинутой вперед головой
Постоянное сохранение такой осанки характеризуется постоянным увеличенным давлением на задние части зигапофизарных суставов и задние части межпозвоночных дисков, а также сужение межпозвонкового отверстия в области лордоза в шейном отделе. Может произойти ишемия шейных разгибателей, поскольку для поддержания головы в выдвинутом вперед положении требуется их постоянное изометрическое сокращение. Задняя часть капсул зигапофизарных суставов может адаптивно укорачиваться, а суженное межпозвонковое отверстие может вызывать сжатие нервных корешков. Кроме того, может измениться структура височно-нижнечелюстного сустава, в результате чего нарушается его функция. При таком положении головы лопатки могут поворачиваться медиально, может развиться грудной кифоз, уменьшиться размер грудной полости, снизиться жизненная емкость легких и уменьшиться рост (табл. 5.3).
5.3. Вид спереди и сзади — оптимальное выравнивание
При взгляде спереди ЛСТ делит тело на две симметричные половины (рис. 5.11).
Рис. 5.11. При виде человеческого тела спереди ЛСТ, в случае оптимальной осанки, делит тело на две симметричные части
Голова держится прямо, без видимых наклонов или поворотов. ЛСТ делит лицо на две равные части. Глаза, ключицы и плечи должны быть на одном уровне (параллельны земле). При виде сзади нижние углы лопаток должны быть параллельны и находиться на равном расстоянии от ЛСТ. Углы талии и ягодичные складки должны быть равны. Передний верхний гребень подвздошной кости (ПВГПК) и задний верхний гребень подвздошной кости (ЗВГПК) должны лежать на линии, параллельной земле, а также быть равно удаленными от ЛСТ. Оси тазобедренных, коленных и голеностопных суставов равно удалены от ЛСТ, линия силы тяжести пересекает центральную часть тел позвонков. При оптимальной постуральной ориентации для сохранения поперечной устойчивости требуется минимальное мышечное усилие, или его не требуется вообще. Гравитационные моменты, действующие на одной стороне тела, уравновешиваются равными моментами с другой стороны (табл. 5.4 и 5.5).
5.4. Вид спереди и сзади — отклонения от оптимального выравнивания
Любая асимметрия сегментов тела, вызванная либо движением сегмента тела, либо односторонним постуральным отклонением, нарушает оптимальный мышечный и связочный баланс. Симметричные постуральные отклонения, такие как двустороннее genu valgum (Х-образные колени), нарушающее оптимальную вертикальную ориентацию сегментов тела, вызывают аномальное распределение веса или компрессионных нагрузок на сустав, с одной стороны, и увеличение нагрузок натяжения — с другой. Увеличенные гравитационные моменты требуют повышенной мышечной активности и вызывают перегрузку связок.
Стопа и пльцы Pes planus (плоскостопие). Оценка осанки спереди и сзади должна включать в себя тщательный осмотр стоп. В норме линия отвеса должна находиться на одинаковом расстоянии от лодыжек, а лодыжки должны быть одинакового размера и находиться точно друг напротив друга. Если одна лодыжка больше выступает, или оказывается более впалой, чем другая, к тому же присутствует выворот пяток, вероятно наличие часто встречающейся проблемы, известной под названием pes planus, или плоскостопие. Выворот пяток на 5-10° нормален для детей, начавших ходить, но к 7 годам он должен полностью исчезнуть. Плоскостопие, для которого характерно уменьшение или полное отсутствие свода стопы, может быть либо жестким, либо подвижным. Жесткое плоскостопие является структурной деформацией, которая может быть наследственной. При жестком плоскостопии медиальный продольный свод отсутствует как при стойке «на цыпочках», без нагрузки на среднюю часть стопы, так и при нормальном положении (на всей стопе). При подвижном плоскостопии свод уменьшается при нормальной весовой нагрузке на стопу, но вновь появляется, когда человек встает на цыпочки, и вообще в любой ситуации, когда стопа не находится под нагрузкой. Как при жестком, так и при подвижном плоскостопии головка таранной кости смещается вперед, медиально и вниз. Ее смещение вызывает спад натяжения в подошвенной пяточно-ладьевидной связке и удлинение задней большеберцовой мышцы (рис. 5.12).
Рис. 5.12. При плоскостопии происходит смещение таранной кости вперед, к середине и книзу; углубление и пронация пяточной кости и углубление ладьевидной кости
Степень плоскостопия можно установить, отметив положение ладьевидной кости относительно головки первой плюсневой кости. В норме ладьевидная кость должна пересекаться линией Фейсса (рис. 5.13).
Рис. 5.13. В норме внутренняя лодыжка, бугор ладьевидной кости и головка первой плюсневой кости находятся на одной линии, называемой линией Фейсса
Если ладьевидная кость вдавлена, она будет находиться ниже линии Фейсса и при серьезных случаях плоскостопия может даже быть на полу. Результатом плоскостопия с пронацией бывает относительная гиперподвижность стопы, которая может требовать мышечных сокращений для поддержания костно-связочных дуг в положении стоя. Результатом может также оказываться увеличение весовой нагрузки на головки 2–4 плюсневых костей. Жесткая форма плоскостопия затрудняет отталкивание при ходьбе, поскольку стопа неспособна к супинации и становится при отталкивании жестким рычагом. Пронация под нагрузкой в положении стоя также вызывает медиальную ротацию большой берцовой кости и может влиять на функцию коленного сустава. Pes cavus (полая стопа). Медиальный продольный свод стопы вместо того, чтобы быть низким (как при плоскостопии), оказывается необычно высоким. Такой высокий свод называют pes cavus (рис. 5.14).
Рис. 5.14. Полая стопа
Pes cavus является более устойчивым положением, чем плоскостопие. Вес переносится на внешние части стопы, и при этом могут натягиваться латеральные связки и длинная малоберцовая мышца. При ходьбе стопа не может адаптироваться к опоре, поскольку подтаранный и поперечный предплюсневый суставы сближены или находятся в фиксированном положении супинации. Hallux valgus (вальгусная деформация первого пальца стопы). Вальгусная деформация первого пальца стопы (ВДППС) является довольно распространенным явлением, при котором происходит медиальное отклонение первого плюсневого и предплюсне-плюсневого суставов и латеральное отклонение фаланг в плюснефаланговом суставе (рис. 5.15).
Рис. 15. Вальгусная деформация первого пальца стопы
Сумка средней части головки первой плюсневой кости может воспалиться. Возникает бурсит первого пальца стопы как реакция на увеличение контактных усилий между обувью и боковой частью первого ПФС. Кроме того, на медиальной стороне сустава может произойти разрастание кости: это попытка организма увеличить площадь суставной поверхности. Сочетание костного выроста и образования бурсита, а также вероятное смещение ПФС не только увеличивает сустав в размерах, но может быть источником болевых ощущений и даже может потребовать хирургического вмешательства. Наиболее распространенной причиной ВДППС является аномальная пронация в сочетании с приведением носка, что ведет в гиперподвижности 1-го пальца. Сгибатели растягиваются над ПФС и укорачиваются над ПМС. Мышцы-разгибатели укорачиваются над ПФС и растягиваются над ПМС. Последовательность развития hallux valgus приведена в табл. 5.6.
Таблица 5.6 ПОСЛЕДОВАТЕЛЬНОСТЬ РАЗВИТИЯ HALLUX VALGUS (ВДППС)
Этиология ∙ Костные изменения Стадия 1 Э: Аномальная пронация носка по типу приведения стопы ведет к гиперподвижности 1-го пальца. Поперечная головка мышцы, приводящей первый палец стопы не может адекватно стабилизировать 1-й плюснефаланговый сустав (ПФС), и 1-я плюсневая кость начинает отходить от пр оксимальной фаланги Нестабильность 1-го пальца позволяет поперечной головке мышцы, приводящей первый палец стопы оттянуть основание проксимальной фаланги от головки 1-й плюсневой кости. Латеральная сезамовидная кость смещается наружу. Мышца, отводящая первый палец, проскальзывает под 1-й плюсневой костью, вызывая пронацию первого пальца КИ: В медиальной части сустава происходит костная абсорбция за счет уменьшения нормальных компрессионных сил между основанием проксимальной фаланги и головкой 1-й плюсневой кости. Происходит смещение кости по латеральной части сустава в попытках сохранить контакт между суставными поверхностями ПФС
Стадия 2 Э: Сухожилия разгибателя первого пальца стопы и сгибателя первого пальца смещаются наружу относительно оси ПФС. Изменение линий действия этих мышц создает приводящее усилие, действующее на 1-ю плюсневую кость и отводящую силу, действующую на первый палец Поперечная головка мышцы, приводящей первый палец стопы, продолжает оттягивать основание проксимальной фаланги от головки 1-й плюсневой кости. Изменение связей костных компонентов заставляет внутренние мышцы также оттягивать проксимальную фалангу от головки 1-й плюсневой кости. Обе сезамовидных кости смещаются наружу; на медиальной части ПФС начинает формироваться сумка КИ: Костная абсорбция продолжается снаружи на дорсальных и дистальных краях головки 1-й плюсневой кости. Костные отложения наблюдаются на дистальной медиальной части головки 1-й плюсневой кости по мере того, как расширяется пространство сустава
Стадия 3 Э: Сухожилия длинного разгибателя 1-го пальца и длинного сгибателя 1-го пальца располагаются в более латеральном положении относительно оси ПФС, при этом увеличивается эффект тетивы, и 1-я плюсневая кость оттягивается еще дальше. Увеличение расстояния между 1-й и 2-й плюсневыми костями 1-я плюсневая и 1-я клиновидная кости вынуждены отклоняться внутрь вследствие ретроградного усилия, создаваемого давлением 1-го пальца на второй. Сезамовидная кость смещается в положение кнаружи от головки плюсневой кости, внутренние мышцы уже не могут стабилизировать наружную часть сустава. Сумка на медиальной стороне сустава увеличивается КИ: Продолжается осаждение кости на дорсо-латеральной части головки 1-й плюсневой кости в попытке сохранить суставные отношения между поверхностями 1-го ПФС. Головка увеличивается, несмотря на постоянную реабсорбцию кости в латеральной ее части
Стадия 4 Э: На этой стадии может произойти подвывих и/или вывих 1-го ПФС. Головка 1-й плюсневой кости смещается внутрь, 1-й палец смещается наружу и может даже находиться над или под 2-м пальцем Обычно прогрессирование подвывиха 1-го плюсневого сустава незаметно, пока вальгусная деформация не начнет сопровождаться ревматическими воспалительными заболеваниями КИ: У 15–20 % пациентов происходит смещение 2-го пальца вследствие давления, оказываемого наложенным на него 1-м пальцем
Коленные суставы Genu valgum (Х-образные колени) считаются нормой у детей в возрасте от 2 до 6 лет. Однако к 6–7 годам физиологическая Х-образность должна уменьшаться, и угол вальгуса у молодых взрослых людей не должен превышать 5–7°. При genu valgum механические оси нижних конечностей смещаются латерально. Если угол genu valgum превышает 30° и сохраняется после 8-летнего возраста, могут произойти структурные изменения. В результате увеличения момента силы, действующего на коленный сустав, медиальные суставные структуры подвергаются аномальной нагрузке растяжения или расхождения, а латеральные структуры — аномальной компрессии (рис. 5.16). Коленная чашечка может смещаться наружу и быть, таким образом, предрасположенной к подвывиху.
Рис. 5.16. При Х-образных коленях внутренняя часть коленного сустава подвергается нагрузке растяжения, а наружная часть — компрессионной нагрузке
Затрагивается также и стопа, поскольку гравитационный момент, действующий на стопу при genu valgum стремится к пронации стопы с соответствующим увеличением нагрузки на медиальный продольный свод и его опорные структуры. Равным образом возрастает аномальная весовая нагрузка на заднюю медиальную часть пяточной кости (вальгусный крутящий момент). Дополнительно связанные с этим изменения могут включать в себя плоскостопие, латеральное скручивание большой берцовой кости, латеральный подвывих коленной чашечки и контралатеральную ротацию поясничного отдела позвоночника. Genu varum (О-образные ноги) — это состояние, в котором колени широко разведены при поставленных вместе стопах и касающихся друг друга лодыжках. Небольшая степень genu varum считается нормальной при рождении и до возраста 3–4 года. Физиологическое искривление симметрично, и происходит как за счет бедренной, так и большой берцовой кости. В результате увеличения компрессионных усилий может происходить утолщение коркового слоя на медиальной вогнутости как бедренной, так и большой берцовой кости, а коленная чашечка может смещаться внутрь. Некоторые из наиболее распространенных причин genu varum: нехватка витамина D, рахит, остеохондрит, или травма эпифиза. Косые коленные чашечки (по аналогии с косоглазием) — это такое их положение, при котором верхний медиальный полюс чашечки направлен внутрь, а нижний полюс — наружу (рис. 5.17,а). Такое измененное положение коленных чашечек может наблюдаться на одном или обоих коленях и может быть признаком увеличенного медиального скручивания бедренной кости (избыточная бедренная антеверсия) или медиальной ротации большой берцовой кости. В этом состоянии может увеличиваться угол Q, и контроль коленной чашечки может оказаться затрудненным.
Рис. 5.17. Косые и развернутые коленные чашечки: а — при скошенных коленных чашечках верхний медиальный полюс чашечки направлен медиально, а нижний — латерально; b — при развороте чашечек наружу («глаза кузнечика») чашечки располагаются высоко и латерально, направлены вверх и наружу
Развернутые коленные чашечки («глаза кузнечика») — это латеральное смещение чашечек, при котором они направлены вверх и наружу (рис. 5.17,b). За более высокое, чем в норме, положение коленной чашечки (patella alta) может отвечать аномально длинная связка коленной чашечки. Медиальная ротация коленной чашечки вызывается либо ретроверсией бедренной кости, либо латеральным скручиванием большой берцовой кости. Разворот коленных чашечек наружу приводит к затруднениям их контроля и уменьшению их стабильности.
Позвоночник Сколиоз. Сколиоз — это стойкое патологическое искривление позвоночника во фронтальной плоскости. (Искривления в сагиттальной плоскости называются кифозами и лордозами.) Сколиозы разделяют на неструктурные, или простые, и структурные, или сложные. Неструктурные сколиозы возникают после рождения. Такие искривления позвоночника часто называют функциональным сколиозом, так как не происходит грубых анатомических изменений позвонков, нет фиксированной ротации позвоночника. Неструктурные сколиозы выявляют при нарушении осанки, укорочении одной ноги, рефлекторном отклонении позвоночника, воспалении тканей, расположенных рядом с позвоночником. Резкое боковое искривление позвоночника возникает при болевом синдроме или истерии. Как правило, после устранения причины форма позвоночника восстанавливается. Например, оперативное удлинение нижней конечности выравнивает положение таза и устраняет компенсаторное боковое искривление позвоночника (так называемый статический, или гравитационный, сколиоз). Структурные сколиозы подразделяют на врожденные и приобретенные. Структурные сколиозы могут быть симптомом таких заболеваний, как сирингомиелии, нейрофиброматоза, болезни Фридрейха, синдрома Марфана, синдрома Элерса-Данлоса, мукополисахаридоза, гомоцистинурии, остеохондродисплазии (спондилоэпифизарная дисплазия и др.), перенесенной нейроинфекции (полиомиелит) и др. Иногда боковое искривление позвоночника становится ведущим признаком так называемой сколиотической болезни. В связи с многообразием причин возникновения структурных сколиозов до настоящего времени нет общепризнанной их классификации. Согласно классификации Кобба, в зависимости от первично или предположительно первично вовлеченной в патологический процесс ткани различают невропатические, миопатические, остеопатические и метаболические сколиозы. Каждую из перечисленных групп разделяют в зависимости от этиологии на подгруппы. Так, в группу невропатических входят паралитический сколиоз (полиомиелит), сколиоз при сирингомиелии, нейрофиброматозе, церебральных параличах, спинномозговой грыже и др. Миопатические сколиозы могут быть обусловлены мышечной дистрофией, врожденной миопатией и амиоплазией. Остеопатические сколиозы чаще связаны с пороком развития позвоночника, например, одиночный или множественные полупозвонки, полный или частичный синостоз двух позвонков, пороком развития грудной клетки (например, добавочные ребра, отсутствие ребер или их синостоз). Остеопатический сколиоз может развиться при тяжелых формах несовершенного остеогенеза, остеомаляции, системном остеопорозе (часто сочетается с так называемым «сенильным кифозом»). В группу метаболических сколиозов входят боковые искривления позвоночника при рахите, рахитоподобных заболеваниях, нефрогенной остеопатии, нарушениях эндокринной регуляции и др. Среди структурных сколиозов практическое значение имеют также деформации, возникающие при обширных ожогах, заболеваниях грудной клетки, разрушении части позвонков в результате травмы, расположенной экстра- или интрамедуллярно опухоли. Боковые искривления позвоночника неясной этиологии называют идиопатическими сколиозами. В настоящее время большинство разновидностей сколиозов, которые ранее считали идиопатическими, относят к диспластическим. Характер биохимических отклонений (обмен гликозаминогликанов) при врожденном, диспластическом и идиопатическом сколиозах аналогичен. Эти структурные сколиозы встречаются наиболее часто. Деформацию позвоночника, возникающую в результате врожденных изменений формы позвонков, например, полупозвонки, называют врожденным сколиозом, менее грубые изменения их формы, не приводящие непосредственно к боковому искривлению, например, аномалия тропизма суставных отростков, называют диспластическим сколиозом. Для объяснения механизма формирования бокового искривления позвоночника выдвинут ряд гипотез. Так, выделяют дистензионные сколиозы, при возникновении которых формирование дуги искривления зависит от нарушения мышечного равновесия (так называемая «мышечная гипотеза»). Примером подобного сколиоза является паралитический. Для большинства других диспластических сколиозов основным патогенетическим фактором считают первичное нарушение роста. Все структурные изменения позвонков при этих сколиозах возникают в процессе роста. К ним относят торсию (скручивание позвонка — укорочение дужки на выпуклой стороне искривления и одновременное удлинение дужки на вогнутой стороне). При этом тело позвонка принимает клиновидную форму, меняется структура его губчатого вещества (перекладины костной ткани располагаются как бы по спирали). Наиболее интенсивная деформация увеличивается в периоды ускоренного роста. В начальной стадии развития диспластического сколиоза тела позвонков остаются симметричными, студенистое ядро располагается эксцентрично, уменьшается в диаметре, межпозвоночные диски приобретают клиновидную форму. При развитии деформации нарастают дистрофические изменения в студенистом ядре, тела позвонков становятся асимметричными, а диски симметричными. Многие ортопеды объясняют развитие диспластического сколиоза эпифизеолизом дисков: данные диски соскальзывают по эпифизарному хрящу. Некоторые авторы придают большое значение дистрофическим процессам в эпифизарном хряще и в самом межпозвоночном диске, которые связывают с нарушением трофики и заболеваниями нервной системы (например, при дизрафическом статусе — см. «Сирингомелия»). В конечной стадии сколиотическая деформация в большей степени определяется клиновидной деформацией тел позвонков. Позднее половое созревание удлиняет период асимметричного роста позвонков и утяжеляет течение сколиоза. Сколиоз может прогрессировать, и после окончания роста позвоночника за счет остеопороза позвонков и дистрофического процесса в межпозвоночных дисках. Прогрессированию сколиоза во всех возрастных группах могут способствовать также неблагоприятные условия статодинамической нагрузки, слабость мышечной системы, сопутствующие заболевания нервной системы. Деформация позвоночника при сколиозе состоит как минимум из трех дуг искривлений — одной первичной и двух вторичных, компенсаторных. При некоторых структурных сколиозах компенсаторные дуги формируются недостаточно, поэтому для них характерна большая первичная дуга. Определение первичной дуги искривления имеет большое значение для оценки типа сколиоза. Первичная дуга появляется раньше других, она отличается стабильностью, в ней более выражены структурные изменения (прежде всего торсия позвонков, а при выраженной деформации и клиновидность тел позвонков), ее величина (в градусах) обычно больше, чем компенсаторных дуг. Между первичным и вторичным искривлениями расположен нейтральный позвонок (без торсии или ротации). Он может входить в состав того или иного искривления, в связи с чем, как правило, занимает наклонное положение. В качестве критерия тяжести деформации используют ряд показателей — выраженность торсии позвонков, стабильность искривления и его величину в градусах. Предложено несколько вариантов деления сколиозов по степеням. В нашей стране наибольшее распространение получила классификация Чаклина, в соответствии с которой различают четыре степени сколиоза: I степень — искривление до 10° (170°), II степень — до 25° (155°), III степень — до 40° (140°), IV степень — более 40°. А.Е. Фрумина предложила при IV степени сколиоза выделять тяжелые искривления до 75° (105°) и крайне тяжелые — более 75°. Существуют и иные варианты деления сколиозов по степеням: I степень — до 30°, II степень — до 60°, III степень — до 90°, IV степень — более 90°. Однако все они условны и авторы не придают этому принципиального значения. Степень деформации обычно оценивают по величине первичной дуги искривления. Из многочисленных способов определения угла искривления наибольшее распространение получили методы Кобба-Липманна и Фергюсона-Риссера. Метод Кобба-Липманна заключается в следующем: проводят линии вдоль верхнего и нижнего краев тел нейтральных позвонков (верхнего и нижнего); перекрест перпендикуляров, восстановленных к этим двум линиям, дает угол искривления. При использовании метода Фергюсона-Риссера выявляют три точки дуги искривления: две, соответствующие центрам нейтральных позвонков, и третью — в центре позвонка, расположенного на вершине дуги искривления; образованный этими точками угол отражает величину искривления. Метод Фергюсона-Риссера позволяет получить более точные данные, но метод Кобба-Липманна проще и чаще применяется в практике. Для оценки других компонентов сколиотической деформации измеряют торсию позвонков, по проекции основания дужек, или остистого отростка, а также клиновидность тел позвонков, по разнице их высоты с выпуклой и вогнутой сторон искривления. Большое значение имеет стабильностьдеформации позвоночника, для объективной оценки которой обычно используют рентгенографию позвоночника в переднезадней проекции в положении больного стоя и лежа. Отношение величин углов искривления на этих снимках (индекс стабильности) позволяет вести наблюдение в динамике, особенно при прогрессировании деформации. Стабильность деформации не зависит от ее степени. Нестабильные сколиозы склонны к прогрессированию. Важная характеристика сколиотической деформации — это ее уравновешенность. Для неуравновешенных (декомпенсированных) сколиозов характерно отклонение центра тяжести туловища от средней линии. В практике для оценки уравновешенности используют отвес, опущенный от остистого отростка VII шейного позвонка или большого затылочного бугра. По локализации вершины угла первичного искривления выделяют следующие типы сколиозов: шейно-грудной, грудной, пояснично-грудной, поясничный и комбинированной, или двойной. При шейно-грудном (верхнегрудном) сколиозе вершина первичной дуги искривления позвоночника локализуется на уровне IV–V грудных позвонков. Эта дуга обычно короткая, а компенсаторная дуга длинная, захватывает нижний грудной и поясничный отделы позвоночника. Уже на ранних этапах развития при шейно-грудном сколиозе отмечают резкую асимметрию надплечий, вовлечение шейного отдела позвоночника, что сопровождается развитием костной формы кривошеи и изменениями лицевого скелета. При этом типе сколиоза мало нарушается функция внешнего дыхания и сердечно-сосудистой системы; в зрелом возрасте нередко развивается остеохондроз грудного отдела позвоночника. При сочетании с кифозом могут возникать нарушения функции спинного мозга. Грудной сколиоз чаще бывает правосторонним, его вершина расположена на уровне VII–VIII грудных позвонков. Примерно у 70 % больных с этим типом сколиоза наблюдается прогрессирование деформации (один из самых «злокачественных» сколиозов). Значительная деформация грудной клетки приводит к нарушению функции внешнего дыхания и сердечно-сосудистой системы, так называемое «кифозосколиотическое сердце». Грудной сколиоз вызывает значительные нарушения фигуры больного (изменяются треугольники талии, развивается реберный горб). Пояснично-грудной сколиоз имеет вершину первичной дуги искривления на уровне X–XII грудных позвонков и по характеру занимает промежуточное положение между грудными и поясничными сколиозами Правосторонний пояснично-грудной сколиоз по течению напоминает грудной, т. е. склонен к прогрессированию, а левосторонний приближается к поясничному сколиозу. В целом при этом типе сколиоза значительно нарушается функция внешнего дыхания и сердечно-сосудистой системы, изменяется фигура больного, нередко отмечаются боли. Поясничный сколиоз характеризуется дугой искривления с вершиной на уровне I–II поясничных позвонков, чаще встречается левосторонний поясничный сколиоз. Он отличается сравнительно легким течением, редко дает значительную степень деформации, функция внешнего дыхания почти не нарушается. При I–II степенях деформации поясничный сколиоз мало заметен и часто не распознается. Для этого типа сколиоза характерно сравнительно раннее появление поясничных и пояснично-крестцовых болей (нередко уже во втором или третьем десятилетии жизни). Быстро развивается дистрофический процесс в межпозвоночных дисках (остеохондроз), а затем спондилез, в результате чего деформация прогрессирует, угол дуги искривления достигает 20–30°, что изменяет фигуру больного (чаще это отмечается в пожилом возрасте). Пояснично-крестцовый сколиоз встречается редко, вершина деформации расположена в нижних поясничных позвонках, в дугу искривления включается таз, в результате чего происходит его перекос с относительным удлинением одной ноги. На рентгенограммах определяют выраженную торсию поясничных позвонков без бокового искривления. Этот тип сколиоза также может вызывать пояснично-крестцовые боли. Комбинированный, или S-образный, тип сколиоза называют также двойным, так как от других типов он отличается наличием двух первичных дуг искривления. Вершина грудного искривления находится на уровне VIII–IX грудных позвонков, а поясничного — на уровне первых верхних поясничных позвонков. Нередко этот тип смешивают с грудным и поясничным сколиозом. При комбинированном сколиозе обе кривизны обладают примерно равной величиной и стабильностью. Лишь при комбинированном сколиозе IV степени это соотношение меняется, так как грудная кривизна как бы обгоняет поясничную. Внешне течение комбинированного сколиоза весьма благоприятно, так как имеются уравновешивающие друг друга две кривизны, однако динамическое наблюдение показывает, что он склонен к прогрессированию. Обычно при этом типе нарушаются функции внешнего дыхания, сердечно-сосудистой системы, рано появляются боли в поясничной области. Для диспластического сколиоза характерна гипермобильность многих суставов и позвоночника, часто отмечают статическое плоскостопие. Нередко наблюдается слабость мышечной системы, особенно мышц спины, брюшной стенки и так называемой «пельвиотрохантерной группы» (ягодичных и др.), что приводит к значительному нарушению осанки и способствует прогрессированию деформации позвоночника. Диагностика. Обследование начинают с общего осмотра. Обращают внимание на осанку (стоит прямо, сутулится, в какую сторону отклонено туловище). Отмечают положение головы, симметрию лица, уровень расположения надплечий, симметрию треугольников и характер линии талии. Фиксируют также расположение пупка, форму грудной клетки, а у девочек — симметрию положения и развития молочных желез. Кроме того, нужно выяснить, на одном ли уровне расположены гребни подвздошных костей, нет ли деформации или укорочения нижних конечностей. При осмотре сзади определяют положение лопаток, наличие кифоза или лордоза в грудном отделе позвоночника, реберного горба, расположение межъягодичной складки. При осмотре сбоку (с обеих сторон) оценивают кифоз и протяженность реберного горба. Очень важно осмотреть больного со сколиозом в процессе постепенного сгибания головы, грудного, поясничного отделов позвоночника и всего туловища, вначале стоя, а затем сидя. В последнем случае неструктурная деформация позвоночника во фронтальной плоскости нивелируется. При осмотре больного в наклонном положении (стоя или сидя) хорошо видна асимметрия мышечного рельефа и реберный горб на выпуклой стороне искривления. При неструктурных сколиозах этой асимметрии не бывает. Для оценки высоты реберного горба можно провести несложное измерение. С этой целью больному предлагают постепенно наклоняться вперед и в момент, когда разница между сторонами (выбухающие и уплощенные ребра) станет максимальной, устанавливают горизонтально поперек позвоночника планку на уровне вершины реберного горба и измеряют расстояние от планки до грудной клетки с уплощенной стороны. Для более точных измерений высоты реберного горба используют специальные приборы. Для определения внешней формы позвоночника и грудной клетки при сколиозе предложен ряд конструкций сколиозометров, например, кифосколиозометр Недригайловой, фотографирование на сетке по Гаглунгу и др. Наиболее достоверную информацию о характере искривления позвоночника дает рентгенологическое исследование. Его следует проводить во всех случаях, когда клинически определяется деформация позвоночника. Выполняют рентгенографию позвоночника в переднезадней проекции в положениях стоя и лежа, а также делают профильный снимок — в положении больного лежа. Желательно на одной рентгенограмме снять весь позвоночник, а на прямом снимке получить изображение крыльев таза (особенно в период окончания роста). Для специальных целей иногда делают рентгенограммы в положении сидя с наклоном вправо и влево. Кроме определения этиологии, типа сколиоза, его степени и других характеристик на рентгенограммах отмечают признаки прогрессирования деформации (например, признак Мовшовича — относительный остеопороз нижнебоковых сегментов тел позвонков на выпуклой стороне дуги искривления), критерий роста позвоночника (тест Риссера). Последний критерий имеет особо важное значение, так как окончание роста соответствует замедлению или прекращению прогрессирования сколиоза. Принято различать четыре степени покрытия крыльев подвздошных костей ядрами окостенения: I — появление ядер, II — их развитие до середины крыла подвздошной кости, III — полное покрытие крыла подвздошной кости, IV — полное спаяние ядер с основной костью. Однако замедление роста не означает полного прекращения прогрессирования сколиоза. Известно, что после завершения развития апофизов подвздошных костей при выраженных степенях деформации позвоночника она может нарастать. Обследование больного со сколиозом обычно включает антропометрические измерения (см. раздел «Антропометрия»), дополнительно определяют рост сидя и по его динамике судят о начале периода усиленного роста позвоночника. Иногда оценивают возможность растягивания позвоночника в подвешенном состоянии, например с помощью петли Глиссона. По разнице роста, измеренного обычным способом и с нагрузкой, судят о стабильности деформации позвоночника. Если искривление позвоночника устраняется в подвешенном состоянии или лежа, то говорят о нефиксированном сколиозе (как правило, это неструктурная деформация). Сколиоз, который удается устранить неполностью, — частично фиксированный, а при невозможности коррекции — просто фиксированный. При нестабильном сколиозе, кроме возможности пассивной коррекции, выявляют также способность к активной самокоррекции деформации. Для определения уравновешенности сколиоза используют отвес, опущенный от VII шейного позвонка или большого затылочного бугра до межъягодичной складки. Отклонение его в сторону свидетельствует о неуравновешенности деформации (декомпенсированный сколиоз), что создает дополнительные условия неблагоприятной статико-динамической нагрузки и способствует ее прогрессированию. Проверяют способность к активному самоуравновешиванию за счет перемещения центра тяжести. Для оценки функционального состояния мышц туловища часто используют функциональные пробы на выносливость к длительной статической нагрузке. Так, для определения функционального состояния мышц — разгибателей туловища, предлагают удерживать туловище на весу до отказа от нагрузки. Этот показатель в норме в возрасте 7-11 лет составляет 52 мин, 12–16 лет — 11/2-21/2 мин. Аналогичный тест для мышц живота (удержание выпрямленных ног на весу под углом около 30° к горизонтали) в норме составляет не менее 1 мин. Для избирательного тестирования мышц брюшной стенки (без участия пояснично-подвздошных мышц) рекомендуется: удержание туловища в положении полуприседания (руки на затылке или разведены в стороны; с сильно согнутыми ногами (стопы фиксированы); в норме этот показатель равен 1/2-11/2 мин. Завершая обследование больного со сколиозом, оценивают функцию внешнего дыхания и сердечно-сосудистой системы. Больной со структурным сколиозом обязательно должен быть осмотрен невропатологом для уточнения этиологии деформации и происхождения сопутствующих вторичных нарушений функции нервной системы (боль, нарушения чувствительности, движений и т. п.). При метаболических сколиозах большое значение имеет биохимическое исследование крови, мочи. Далее рассмотрим более конкретно влияние сколиоза при оценке осанки. Так, еще одним сегментом тела, требующим особого рассмотрения при оценке осанки при виде спереди или сзади, является позвоночник. В норме, при взгляде сзади, позвоночник выровнен по вертикали и точно делится пополам ЛСТ, соответственно, структуры по обеим сторонам позвоночника симметричны. ЛСТ проходит через среднюю линию затылочной кости, через остистые отростки всех позвонков и точно через ягодичную щель. При оптимальной осанке структуры позвоночника связки и мышцы способны поддерживать вертикальную ориентацию столба с минимальной нагрузкой и расходом энергии. Если одна или более медиально-латеральных структур не может создавать адекватную опору, позвоночник будет сгибаться в сторону. Боковое сгибание сопровождается ротацией позвонков, поскольку это сопряженные движения, ниже уровня второго шейного позвонка. Устойчивые боковые отклонения нескольких смежных позвонков от ЛСТ в одном или нескольких отделах позвоночника могут указывать на наличие латерального изгиба позвоночника, называемого сколиозом (рис. 5.18).
Рис. 5.18.Сколиоз. Боковой изгиб позвоночного столба имеет выпуклость вправо в грудном отделе и выпуклость влево в пояснице.
Существуют разные типы сколиозов, однако 80 % из них приходится на подростковый идиопатический сколиоз. Термин «идиопатический» означает, что причина данного состояния неизвестна. Идиопатические сколиозные изгибы определяются как структурные изгибы (рис. 5.19).
Рис. 5.19. Латеральный изгиб позвоночника с выпуклостью влево в грудном отделе. Видна клиновидность позвонков в части изгиба, показанной на вставке. Эта клиновидность указывает на структурные изменения, наблюдаемые при идиопатическом сколиозе
При таких изгибах происходят структурные изменения в телах позвонков, поперечных и остистых отростках, межпозвоночных дисках, связках и мышцах. Асимметричный рост и развитие тел позвонков ведет к тому, что они приобретают клиновидную форму. Рост со сжатой стороны (вогнутость) тормозится или замедляется по сравнению с выпуклой стороной кривой. Неструктурные сколиозные изгибы называют функциональными в том плане, что они могут быть обратимыми, если устранена причина изгиба, а структурные изменения отсутствуют по определению. Эти изгибы являются результатом поддающегося коррекции дисбаланса, такого как неравномерность длины ног или мышечный спазм. Изгибы при сколиозе называют в соответствии с направлением выпуклости и положения кривой. Если кривая выпукла влево в шейном отделе, то ее называют левым шейным сколиозом. Если затронут больше, чем один отдел позвоночника, верхний сегмент называют первым. Изгиб, показанный на рис. 5.18, является структурным и называется: «правый грудной и левый поясничный сколиоз». Исследователи считают, что подростковый идиопатический сколиоз может быть результатом дисфункции вестибулярной системы, нарушений контроля мышечных веретен, наследственных нарушений соединительных тканей, подкорковых аномалий ствола мозга, или нестабильности развития. Lidstrom обнаружил различия постуральных колебаний у 100 детей в возрасте от 10 до 14 лет. 35 детей были родственниками или потомками пациентов со сколиозом, 65 входили в контрольную группу. Эти данные говорят об участии в процессе вестибулярной системы и вероятности участия генетического компонента. Однако в работе не приводится данных, которые однозначно указывали бы на единую этиологию подросткового идиопатического сколиоза. Несмотря на неопределенность, окружающую причину, или причины подросткового идиопатического сколиоза, эффекты действия неравных моментов на структуры тела воистину драматичны и могут иметь для людей самые разрушительные последствия. Следующий пример описывает гипотетическую последовательность развития подросткового идиопатического сколиоза. Первая стадия процесса неизвестна, поскольку исследователи не смогли пока установить опорную структуру, участвующую в первичном нарушении. Таким образом, возможно лишь предположить, что последовательность событий начинается скорее с нарушений в развитии, результатом которых является асимметричный рост позвонков, чем с недостаточности мышечного или связочного аппарата, как предлагается в модели Lidstrom. Далее дана гипотетическая последовательность развития юношеского идиопатического сколиоза: 1. Возможная недостаточность опоры, вызванная дефектом в мышечной и/или связочной опорной системе. 2. Создание момента бокового сгибания. 3. Отклонение позвонков с ротацией (поворотом). 4. Компрессия тел позвонков со стороны вогнутой стороны изгиба. 5. Торможение роста тела позвонка со стороны вогнутости кривой во все еще незрелом позвоночнике. 6. Возникновение клиновидных позвонков в неокрепшем позвоночнике. 7. Выхождение головы из одной линии с крестцом. 8. Компенсаторный изгиб. 9. Адаптивное укорочение мускулатуры туловища со стороны вогнутости. 10. Растяжение мышц, связок и суставных капсул со стороны выпуклости. Эти структурные изменения могут прогрессировать и вызывать по мере роста тяжелые деформации, если только своевременно не будет произведено вмешательство. Деформациям свойственно создавать помехи дыханию и другим внутренним органам и, кроме того, быть неприемлемыми с косметической точки зрения. Было установлено, что около 10 % юношей в США имеют некоторую степень сколиоза. Около 25 % из этой группы имеют изгиб позвоночника, который требует вмешательства в форме наблюдения, ношения корсета или операции. Юноши с неокрепшими позвоночниками, изгиб которых составляет от 25–40°, входят в группу высокого риска, так как такие изгибы имеют тенденцию к прогрессированию. По мнению Roach, корсет может успешно предотвратить дальнейшее развитие сколиоза в 70–80 % случаев его использования. Изгибам с прогрессированием за 40° необходимо хирургическое вмешательство для предотвращения дальнейшего развития. Если развитие изгиба распознается достаточно рано, можно назначить лечение, которое либо скорректирует изгиб, либо предотвратит его дальнейшее увеличение. По данным второй фазы исследования университета штата Юта, в котором зрительное определение (скрининг сколиоза) выполнялось на 3 тыс. студенток колледжа (19–21 лет) из 34 штатов и 5 зарубежных стран, 12 % из числа обследованных имели нераспознанные ранее латеральные отклонения в позвоночнике. При рассмотрении того факта, что юношеский идиопатический сколиоз может в некоторых случаях прогрессировать и, при отсутствии лечения, приводить к серьезным деформациям, важной представляется внедрение программ скрининга в школах. Однако как сообщалось в 1986 г., только 20 штатов затребовали программы скрининга сколиоза. Процедуры скрининга довольно просты, и многие диагносты быстро стали специалистами по определению изменений, происходящих при сколиозе. Отклонения позвоночника при сколиозе вызывают асимметричные изменения в структурах тела, и некоторые из таких изменений могут быть распознаны простым осмотром контуров тела. Типичные программы скрининга обычно предназначены для идентификации следующих признаков: неравные углы талии (рис. 5.20,а), разный уровень плеч (рис. 5.20,b), реберный горб и явный изгиб позвоночника в сторону (рис. 5.20,с).
Рис. 5.20. Типичные изменения контуров тела, используемые в программах скрининга сколиоза: а — неравные углы талии, или разное расстояние рук от тела; b — неравная высота плеч или неодинаковый уровень лопаток; c — реберный горб при наклоне туловища вперед.
Глава 6 ФАКТОРЫ, ВЛИЯЮЩИЕ НА ОСАНКУ
Возраст
Младенцы и дети. Постуральный контроль у младенцев развивается прогрессивно в течение первого года жизни, начиная от контроля головы, тела, в положении сидя, и вплоть до контроля тела в положении стоя. Стабильность осанки, или способность фиксировать и удерживать позу относительно силы тяжести, должна сформировываться до того, как ребенок начинает движения в этом положении. Обычно ребенок учится сохранять определенное положение тела посредством совместного сокращения мышц-агонистов и антагонистов вокруг сустава, а затем — выходить из позы и снова принимать ее (вставать из сидячего положения, садиться из положения стоя). Как только достигается стабильность, ребенок переходит к управляемой подвижности и навыку. Управляемая подвижность — это способность двигаться в пределах позы, например, перенос веса в положении стоя. Навык — это эффективность такой деятельности как ходьба, бег, прыжки, т. е. динамической постуральной активности. Осанка в положении стоя в младенчестве и раннем детстве несколько отличается от постуральной ориентации у взрослых, но когда ребенок достигает возраста 10–11 лет, постуральная ориентация должна быть аналогичной ориентации у взрослых (табл. 6.1).
Однако плохая осанка у ребенка 7–8 лет распознаваема, поскольку она похожа на плохую осанку взрослых людей. Например, плохая осанка может включать в себя выдающуюся вперед голову, кифоз, лордоз и переразгибание коленей. По данным Woollacott, когда ребенок достигает 7-10-летнего возраста, постуральные реакции на движения платформы становятся менее вариабельными и более сопоставимыми с реакциями взрослых по паттернам мышечной активности и своевременности ответов. Реакции детей младше 7 лет характеризуются большей совместной активацией агонистов и антагонистов и более медленным временем реакции активизации мышц, чем у взрослых или детей старшего возраста. Newell с коллегами исследовали движение ЦД (колебания) в различных возрастных группах (возраст от 2-92 лет). Наименьшие движения ЦД наблюдались в группе молодых студентов (возраст около 20 лет), люди в младших и старших возрастных группах показывали большие колебания ЦД. Люди пожилого возраста. Осанка пожилых людей часто характеризуется большим сгибанием, чем у молодых людей (рис. 6.1).
Рис. 6.1. Изменения осанки с возрастом
Однако пожилые люди в возрасте 70–80 лет могут по-прежнему демонстрировать осанку, близкую к оптимальной. Согнутая осанка, наблюдаемая у некоторых стариков, связана, вероятно, с несколькими факторами, которые могут быть отнесены за счет процесса старения, сидячего образа жизни или их сочетания. На осанку пожилых людей могут влиять такие факторы, как остеопороз. Остеопороз (аномальное уменьшение плотности костей) ослабляет тела позвонков и делает их подверженными переломам. Вслед за коллапсом нескольких смежных передних частей тел ослабленных позвонков увеличивается нормальный кифоз грудного отдела. При кифозе укорачиваются передние мышцы сгибатели туловища, а находящиеся сзади разгибатели — удлиняются. Teramoto с сотрудниками оценивали воздействие кифоза у людей в возрасте от 20–90 лет. Авторы обнаружили, что высокая степень кифоза у пожилых людей значительно уменьшала объем легких и максимальное давление вдоха. Дополнительным признаком осанки пожилых людей может быть выдвинутая вперед голова, которая создает усиленное сгибание в шейном отделе и усиливает разгибание в атлантозатылочном суставе. Амплитуда движения в коленных, тазобедренных, голеностопных суставах и туловище может уменьшаться по причине укорочения мышц и атрофии бездействия. Более того, так как время произвольной постуральной реакции у пожилых людей обычно больше, чем у молодых, пожилые люди обычно стоят так, что площадь опоры (ПО) у них шире, что создает дополнительную безопасность. Постуральные реакции у пожилых людей в возрасте от 61–78 лет на движения платформы отличаются по времени и амплитуде и включают в себя большую совместную активизацию агонистов и антагонистов, чем у молодых людей 19–38 лет. Iverson с сотрудниками тестировали мужчин от 60–90 лет (мужчин, живущих в домах престарелых, во внимание не брали). Применялись два типа тестов на равновесие, которые включали в себя стойку на одной ноге. Было обнаружено, что время поддержания равновесия и создание момента силы с возрастом значительно уменьшаются. При проведении некоторых тестов авторы обнаружили, что создание крутящего момента — достоверный параметр прогноза для времени равновесия, т. е. чем больше был крутящий момент, тем больше было время равновесия. Авторы показали также, что мужчины, выполнявшие физические упражнения 5–6 раз в неделю, показывали больший крутящий момент, чем испытуемые, занимавшиеся реже. Эти данные говорят о том, что высокий уровень физической подготовки и активности оказывает благоприятное действие на способность пожилых людей поддерживать равновесие на одной ноге, которое необходимо в повседневной жизни для той же нормальной ходьбы.
Беременность
Нормально протекающая беременность сопровождается нарастанием массы тела, перераспределением ее на грудь и живот и смягчением связочных и соединительных тканей. Положение ЦТ у женщин меняется из-за увеличения веса и его перераспределения кпереди. Соответственно, постуральные изменения при беременности характерны увеличением кривизны лордоза в шейном и поясничном отделах, протракцией плечевого пояса и гиперразгибанием коленей. Franklin и Conner-Kerr сравнивали результаты обследования осанки у 12 беременных женщин в I и III триместрах беременности. Авторы обнаружили различия в поясничном угле, положении головы и наклоне таза вперед. Поясничный угол увеличился в среднем на 5,9°, среднее увеличение переднего наклона таза равнялось 4°, а голова, по мере развития беременности, отклонялась назад. Эти изменения осанки представляют собой адаптацию, которая помогает удерживать ЦТ над ПО. Смягчение связочных и соединительных тканей, особенно в тазе, крестцово-подвздошных сочленениях, лонном сращении и животе меняет опору и защиту, создаваемую этими структурами, соответственно предрасположенность к растяжению этих структур у беременных выше. Во время беременности многие женщины испытывают боли в спине: в исследованиях Franklin и Conner-Kerr на боль в спине жаловались все женщины.
Профессиональная деятельность и досуг
Статические и динамические позы, характерные для работы и во время развлечений, могут оказывать неблагоприятное действие на структуру и функцию суставов. Травмы суставов и поддерживающих их структур могут вести к нарушению функции, снижению производительности, отсутствии на работе по болезни и, иногда, к потере работы и постоянной инвалидности. Понимание медиками того, что определенные рабочие позы и позы во время восстановительной деятельности вызывают уникальные травмы, требующие для работы с ними специальных знаний, привело к созданию медицинских специальностей в следующих областях: промышленная или профессиональная медицина, медицина исполнительского мастерства или просто «медицина искусства» и спортивная медицина. Для любой профессиональной деятельности или развлечений характерны уникальные позы, а соответственно, и связанные с ними травмы. Каменщики, хирурги, столяры и продавцы большую часть рабочего дня стоят. Секретари, бухгалтеры, операторы ПК и служащие в приемных на работе преимущественно сидят. Артисты часто принимают асимметричные позы: при игре на музыкальных инструментах, во время танца или игры на сцене. Бег, в том числе бег трусцой, и ходьба на длинные дистанции являются динамическими позами, которые чреваты столь же специфическими травмами. Частые проблемы со спиной у населения стимулировали проведение многочисленных исследований, связанных с подъемом тяжести, сутулостью и к созданию различных лечебных программ. Был проведен анализ сидячих положений и их действия на внутридисковые давления в поясничном отделе. Также исследовались положения тела в инвалидной коляске и воздействий переднезаднего и бокового наклона таза на позвоночник и активность мышц туловища в сидячем и стоячем положении при определенных видах работы. В большей части работ говорится, что многие проблемы со спиной можно предотвратить, так как они являются результатом механических нагрузок, вызванных длительным пребыванием в таких статических положениях, как небольшой наклон вперед или сидячее положение, а также с повторными подъемами тяжелых грузов. Многие травмы, полученные как на работе, так и во время развлечений, попадают в категорию «травм от перегрузки». Этот вид травмы вызывается повторными нагрузками, которые превышают физиологические пределы тканей. Мышцы, связки и сухожилия особенно уязвимы при повторных растяжениях, а кости и хрящи травмируются при воздействии повторных компрессионных нагрузок. Случайная выборка среди профессиональных музыкантов в Нью-Йорке показала, что у скрипачей, пианистов, виолончелистов и контрабасистов часто возникают проблемы с шеей и спиной. В более крупном исследовании 485 музыкантов авторы обнаружили, что у 64 % наблюдаются явные болевые синдромы перегрузки. Большинство проблем было связано с мышечно-сухожильными единицами, другие проблемы включали в себя кости, суставы, суставные сумки и мышцы. Исполнители на струнных инструментах имели проблемы с шеей и плечами, связанные с аномальным положением головы и шеи; флейтисты — проблемы с плечами из-за наружной ротации плеч. Это положение им приходилось удерживать в течение длительного времени во время выступлений и репетиций. Любая профессиональная или развлекательная деятельность требует подробного биомеханического анализа специфических поз. Такой анализ помогает определить, как можно смягчить действие аномальных или чрезмерных нагрузок. Иногда анализ подразумевает не только осанку или положение тела человека, но и характеристики рабочего места, такие, как высота стула или стола, тяжесть предметов, которые приходится поднимать или переносить, вес и форму музыкального или любого другого инструмента. Лечение может быть комбинацией изменений окружающей среды, адаптацией инструмента или модификацией позы.
Резюме
Знание биомеханики и нормальной структуры и функции человека образует основу для определения потенциально вредных воздействий асимметричной осанки или позы на структуру и функцию сустава при статических и динамических положениях тела. Эта глава представляет основные характеристики нормальной постуральной ориентации в обычном положении стоя. Анализируются и обсуждаются возможные причины и последствия некоторых наиболее распространенных нарушений постуральной ориентации. Также были представлены некоторые основные элементы постурального контроля. В этой и предыдущих главах читателю дается основная кинематическая и кинетическая информация, требуемая для анализа осанки стоящего человека. Используя сведения, которые были рассмотрены ранее, читатель должен суметь распознать неправильную или экстремальную осанку и определить потенциально вредные последствия такой позы для структур тела, а также формировать основы для анализа ходьбы.
Контрольные вопросы
1. Что такое «конверт колебаний»? 2. Является ли активность четырехглавой мышцы бедра необходимой для поддержания колена в разогнутом положении, если человек стоит? Поясните свой ответ. 3. Является ли активность мышц живота необходимой для поддержания таза на одном уровне, когда человек стоит? Поясните свой ответ. 4. В чем функция крестцово-бугорной связки в положении стоя? 5. Какие отделы позвоночника испытывают наибольшую нагрузку в положении стоя? 6. Определите у стоящего человека типы нагрузки, действующей на следующие структуры: апофизарные суставы поясничного отдела, капсулы апофизарных суставов грудного отдела, фиброзное кольцо в L5-S1, передняя продольная связка в грудном отделе и крестцово-подвздошные суставы. 7. Какой эффект могут оказывать жесткие или закрепощенные мышцы задней поверхности бедра стоящего человека на ориентацию следующих структур: таза, пояснично-крестцового угла, тазобедренного сустава, коленного сустава и поясничного отдела позвоночника. 8. Опишите типичный идиопатический боковой изгиб позвоночника. 9. Опишите моменты, которые действуют на все сегменты тела в результате неожиданного движения опорной поверхности вперед. Опишите мышечную активность, необходимую для сохранения проекции ЛСТ над ЦД. 10. Распознайте изменения в сегментах тела, которые обычно используют в программах скрининга сколиоза. 11. Сравните молоткообразные и когтеобразные пальцы. 12. Как сравнить постуральные ответы на возмущения в положении стоя пожилых людей и детей в возрасте от 1–6 лет? 13. Сравните осанку с согнутым поясничным отделом и разогнутым поясничным отделом в плане питания дисков и нагрузки на связочные и суставные структуры. 14. Каковы взаимоотношения ВСРО, ЛСТ и ЦТ у стоящего прямо человека? 15. Объясните, как развивается вальгусная деформация первого пальца стопы. 16. Опишите влияние осанки с выдвинутой вперед головой на зигапофизарные суставы и капсулы, межпозвоночные диски, связки и мышцы позвоночника.
III. БИОМЕХАНИКА ХОДЬБЫ
Задачи
После изучения этой главы, читатель должен быть способен: Определять 1. Позицию, колебание, и стадии двойной опоры при ходьбе. 2. Подразделения стойки и стадий колебаний при ходьбе. 3. Временные и пространственные параметры при ходьбе.Описывать 1. Объединенное движение в бедре, колене и лодыжке для одной конечности в цикле ходьбы, бега. 2. Местоположение вектора силы реакции опоры относительно суставов бедра, колена и лодыжки при стойке и ходьбе. 3. Моменты силы, действующей в суставах бедра, колена и лодыжки при стойке и ходьбе.
Объяснять 1. Мышечную деятельность в бедре, колене и лодыжке по всему циклу ходьбы, в том числе, почему и когда определенные мышцы активны, и требуемый тип сокращения. 2. Роль каждого из детерминантов походки. 3. Мышечную деятельность в верхних конечностях и туловище при ходьбе.
Сравнивать 1. Движение нижних конечностей и туловища с движением таза и нижних конечностей во время ходьбы. 2. Традиционную терминологию в отношении ходьбы с новой терминологией. 3. Нормальную походку с походкой при слабости разгибателей бедра и отводящих мышц бедра. 4. Нормальную походку с походкой при разной длине ног. 5. Нормальную походку и ходьбу по лестнице — в отношении амплитуды движений и мышечной деятельности. 6. Обычную ходьбу и бег.
Введение
Предшествующие главы этой книги дали читателю представление об основных элементах строения и функций человека. Из главы 13 читатель узнает, каким образом совместно действуют отдельные суставы и мышцы для поддержки тела в стоячем положении. Знание структуры и функции тела в статическом положении формирует основу для изучения человеческой структуры в динамической ситуации. При изучении движений человека (вставание, ходьба) читателю дается возможность изучить, как отдельные суставы и мышцы функционируют в интегральном режиме, одновременно поддерживая прямое положение тела и сообщая движение всему телу. Знание кинематики и кинетики нормальной ходьбы дает читателю основу для анализа, идентификации и коррекции аномалий походки. Одним из наиболее отчетливых признаков человеческой походки является ее индивидуальность. Паттерн походки каждого человека очень характерен. Романисты и драматурги часто используют особенности походки для описания характеров своих персонажей. Особенности походки могут отражать профессию человека, строение его тела, состояние здоровья и особенности личности, а также еще множество физических и психологических свойств. Например, покачивающаяся походка, описанная у многих моряков, является отражением широкой опорной базы (ОБ), необходимой для поддержания равновесия в море, при качке. Ходьба «вразвалку», используемая при описании толстяков, отражает их характерное строение тела. Нетвердая походка обычно связана либо с состоянием опьянения, либо слабости, а походка пружинистая ассоциируется с состоянием здоровья и силой. «Чванливая» походка говорит об агрессивности, а семенящая может иметь в своей основе робость. Исследования походки говорят о том, что потенциальные жертвы разбойных нападений имеют особый паттерн ходьбы. Этот паттерн, предположительно, свидетельствует об уязвимости и в результате провоцирует нападение. В динамике абсолютно твердого тела действие силы рассматривается как причина изменения движения. Однако если силы уравновешены, то изменения движения не произойдет. В деформируемом теле возникает при этом деформация и связанное с нею изменение напряжения внутри тела (статическое действие). Сила, действующая статически, уравновешена другой силой и вызывает не ускорение, а только деформацию тела. Силу, действующую статически, измеряют уравновешивающей ее силой. Соединенные два соседних звена тела образуют пару, а пары, в свою очередь, соединены в цепи. Биокинематическая пара — это подвижное (кинематическое) соединение двух костных звеньев, в котором возможности движений определяются его строением и управляющим воздействием мышц. В технических механизмах соединения двух звеньев — кинематические пары — устроены обычно так, что возможны лишь вполне определенные, заранее заданные движения. Одни возможности не ограничены (их характеризуют степени свободы движения), другие полностью ограничены (их характеризуют степени связи). Различают связи: а) геометрические (постоянные препятствия перемещению в каком-либо направлении, например костное ограничение в суставе) и б) кинематические (ограничение скорости, например, мышцей-антагонистом). В биокинематических парах имеются постоянные степени связи, которые определяют собой, сколько как максимум и каких остается степеней свободы движения. Почти все биокинематические пары в основном вращательные (шарнирные); немногие допускают чисто поступательное скольжение звеньев относительно друг друга и лишь одна пара (голеностопный сустав) — винтовое движение. При преодолевающих движениях сила сокращающихся мышц (их равнодействующая тяга) — движущая сила, при уступающих движениях сила растягиваемых мышц (их равнодействующая тяга) — тормозящая. Силы сопротивления направлены противоположно действию мышц. По сути дела, звенья тела действуют в биокинематической цепи чаще всего как составные рычаги, в которых очень сложные условия передачи движения и работы. В простом рычаге работа силы, приложенной в одной его точке, передается на другие точки полностью. Если плечи сил неравны, то прилагаемая сила передается либо с потерей в силе (но с выигрышем в пути, а следовательно и в скорости), либо, наоборот, с выигрышем в силе, но с потерей в скорости. В одноплечих рычагах направление передаваемой силы изменяется, а в двуплечих — не изменяется. Сила тяги мышц обычно приложена на более коротком плече рычага, и поэтому плечо ее силы относительно невелико. Это связано с тем, что в большей части случаев мышцы прикрепляются вблизи суставов. Когда мышца расположена вдоль звена и прикрепляется вдалеке от сустава, угол тяги ее очень мал и поэтому плечо силы также очень мало. В связи с этим силы тяги мышц, действующие на костные рычаги, почти всегда дают выигрыш в скорости (естественно, с проигрышем в силе). В зависимости от направления скоростей движения звеньев тела человека могут быть возвратно-вращательными, возвратно-поступательными и круговыми. Строение сочленений не позволяет совершать движения в суставах по «принципу колеса», т. е. делать неограниченный поворот вокруг оси сустава в одну сторону. Поэтому почти все движения имеют возвратный характер. Возвратно-вращательные движения напоминают движения маятника вокруг оси, расположенной поперек биокинематической цепи (сгибание-разгибание) или продольно (супинация-пронация). Определенное согласование вращательных движений в различных суставах биокинематической цепи позволяет конечным звеньям двигаться поступательно (кисть боксера при вращательных движениях в плечевом и локтевом суставах; туловище бегуна при отталкивании ногой). Пример возвратно-поступательного движения — работа пилой, напильником. В этих случаях угловые скорости противоположно направленных движений одинаковы (пара скоростей). Наконец, в шаровидных суставах возможно сложное круговое движение, когда продольная ось звена описывает коническую поверхность. При этом согласуются два движения: самой продольной оси и звена вокруг этой оси. Только такое конусообразное движение и может выполняться без обязательных возвратных движений. В возвратных движениях имеется критическая точка, в которой происходит смена направления движения (амортизации на отталкивание — в беге, заноса весла на гребковое движение — в гребле, замаха ракеткой на ударное движение — в теннисе). В каждом суставе направления и размах движений ограничены. Значит, звено в суставе может занимать не любое, а лишь анатомически возможное положение. Однако из бесчисленного множества возможных движений только малая часть вызвана потребностями человека и отвечает энергетическим требованиям. Эти движения отобраны и закрепились в человеческой практике как наиболее рациональные, стали привычными и общеупотребительными. В биокинематических цепях тела человека движение может передаваться от звена к звену. Скорость, например, кисти при броске мяча может быть результатом движений ног и туловища, а также движений в суставах руки. Движение кисти в этом случае как бы составляется из движений других звеньев тела. Движение, обусловленное движениями ряда звеньев, в биомеханике называют составным.Глава 7 ОБЩИЕ ПРИЗНАКИ И НАЧАЛО ХОДЬБЫ
Общие признаки. Описательные термины, используемые для ненаучной характеристики походки, хорошо дают понятие образа индивидуальных ее особенностей, но не дают всей информации, необходимой для оценки человеческой функции. В наших исследованиях походки участвовали ученые из различных областей, которые дали нам подробные методы для ее анализа. Локомоции человека, или ходьбу, можно описать как поступательное движение всего тела, вызванное координированными, ротационными движениями сегментов тела. Нормальная ходьба ритмична и характеризуется попеременными пропульсивными и ретропульсивными движениями нижних конечностей. Попеременные движения нижних конечностей служат как опорой,так и средством передвижения головы, рук и туловища (ГРТ). ГРТ составляет около 75 % от общего веса тела. Голова и руки — около 25 %, соответственно 50 % приходится на туловище. Когда человек стоит, опорой ГРТ являются обе нижних конечности. При ходьбе ГРТ должны не только балансировать на одной ноге, происходит еще и перенос веса с одной ноги на другую. Вес ГРТ (75 % от всего веса тела) плюс вес переносимой нижней конечности (примерно еще 10 % от веса тела) во время одноопорной фазы должны удерживаться на одной ноге. Хотя одноопорная фаза чередуется с периодами, когда контакт с опорой осуществляют обе конечности, ходьба предъявляет к нижним конечностям значительно более высокие требования, чем статическое положение стоя. Чтобы человек пошел, он должен уметь удерживать ГРТ в равновесии в положении стоя, переносить вес ГРТ с одной ноги на другую, отрывать одну ногу от опоры и поочередно ставить ее впереди другой. Эти действия требуют координации, равновесия, нормальных кинестетических и проприорецепторных ощущений и целостности суставов и мышц. Чтобы упростить понимание ходьбы, некоторые авторы определяли ее в терминах определенных задач, которые надо решить. По мнению профессионалов из Rancho Los Amigos Medical Center (Калифорния), ходьба состоит из трех основных задач: 1) приема веса; 2) одноопорного положения; 3) продвижения вперед безопорной ноги. Иначе говоря, человек должен быть способен принимать и поддерживать вес тела нижней конечностью и выносить одну ногу вперед, чтобы продвинуться. Winter также предложил три основных задачи ходьбы, которые включают в себя: 1) сохранение поддержки ГРТ в условиях действия силы тяжести; 2) сохранение вертикального положения и равновесия; 3) контроль траектории стопы, чтобы пронести ее с безопасным зазором (клиренс) над опорой и поставить мягко, с пятки. В принципе задачи различаются только в том, что Winter ввел мягкий контакт пятки и клиренс стопы в качестве необходимых задач. Кроме изучения происходящего собственно во время ходьбы и соответствующих навыков, исследователи очень заинтересованы в оценке стартовой, начальной фазы ходьбы. Начало ходьбы. Начало ходьбы можно рассматривать как серию или последовательность действий, которые происходят с момента инициирования движения и до начала цикла. Начало ходьбы считается стереотипным действием как у молодых, так и у пожилых здоровых людей. Начало движения описано подробно, гораздо хуже с описанием конечных стадий этого действия. Ходьба начинается из обычного прямого положения стоя, при этом активируются передняя большеберцовая и широкая боковая мышцы в сочетании с торможением икроножной. Двусторонние концентрические сокращения передних большеберцовых мышц (тяга голени) создают крутящий момент в сагиттальной плоскости, который заставляет тело наклониться вперед в лодыжках. Центр давления (ЦД) отклоняется вначале либо назад и вбок, по направлению к переносимой (маховой) ноге (эта нога готовится сделать первый шаг), либо назад и медиально, по направлению к опорной ноге. Отведение бедра маховой ноги происходит почти одновременно с сокращением передних большеберцовых мышц и широкой боковой мышцы; этим создается крутящий момент в венечной плоскости, который поворачивает тело в направлении опорной ноги. Как отмечают Elbe и соавт., бедро и колено опорной ноги сгибаются на несколько градусов (3-10°), и ЦД смещается кпереди и медиально, в направлении опорной ноги. Переднемедиальное смещение ЦД освобождает маховую ногу, которая теперь может оторваться от опоры. Начальная фаза заканчивается, когда шагающая или маховая нога отрывается от опоры, или когда происходит постановка пятки на опору. Общая продолжительность начальной фазы составляет примерно 0,64 с. Здоровый человек может начинать ходьбу с правой или с левой ноги, и при этом в общем паттерне никаких изменений заметно не будет. Однако у пациентов с гемиплегией (односторонним параличом) наблюдаются существенные различия в начальной фазе при начале ходьбы с поврежденной и неповрежденной ноги. Когда шаг начинается с поврежденной ноги, последовательность событий примерно такая же, как у здорового человека, но если первый шаг делают неповрежденной ногой, паттерн становится неустойчивым, и равновесие оказывается под серьезной угрозой.Глава 8 КИНЕМАТИКА ХОДЬБЫ
Ходьба является видом деятельности, весьма сложным для анализа. Соответственно, ее разделяют на определенное число сегментов, что делает возможным идентификацию циклов. Следует заметить также, что анализ ходьбы — весьма особый вид анализа движений в целом. Знание терминологии, применяемой для описания циклов, необходимо для понимания и анализа походки. В целом ходьбу описывают по действиям одной нижней конечности (ее называют эталонной конечностью) от начала и до конца одного цикла ходьбы.8.1. Фазы цикла ходьбы
Цикл ходьбы включает в себя действия, которые выполняются с момента начального контакта с опорой одной нижней конечности и до момента, в который эта же конечность вновь касается опоры (рис. 8.1). За время одного цикла каждая конечность проходит две фазы: 1) опорную (позиции); 2) переноса (безопорную).
Рис. 8.1. Цикл ходьбы состоит из действий, которые выполняются между начальным контактом эталонной ноги с опорой и повторным контактом той же ноги
1. Фаза опоры начинается в тот момент, когда одна конечность соприкасается с опорой (касание пяткой) и продолжается до тех пор, пока любая часть стопы касается опоры (момент отрыва пальцев, рис. 8.2).
Рис. 8.2. Опорная фаза определяется как период, во время которого любая часть стопы эталонной конечности находится в контакте с опорной поверхностью. Период длится от момента начального контакта стопы эталонной ноги (на диаграмме — правой) до момента, когда контакт с опорой осуществляется только пальцами той же (правой) ноги
Во время опорной фазы какая-либо часть стопы постоянно находится в контакте с опорной поверхностью. При обычной ходьбе опорная фаза составляет приблизительно 60 % общего времени цикла. 2. Фаза переноса начинается, как только пальцы одной конечности отрываются от опоры, и заканчивается непосредственно перед постановкой пятки этой же конечности на опору (рис. 8.3). Когда эталонная конечность находится в фазе переноса, контакта с опорой не происходит. Время фазы переноса — до 40 % от общей продолжительности цикла.
Рис. 8.3. Фаза переноса определяется как период, во время которого стопа эталонной конечности не находится в контакте с поверхностью опоры. Фаза переноса начинается с момента отрыва пальцев ног (большого пальца) эталонной ноги (в данном случае, правой) и до последующего ее контакта с опорой
Двухопорный период при ходьбе возникает тогда, когда одна нога начинает постановку на опору, а вторая нога, с противоположной стороны туловища, заканчивает опорную фазу. Таким образом, в одном цикле есть два двухопорных периода (рис. 8.4).
Рис. 8.4. Двойная опора определяется как период, во время которого любые части стоп обеих конечностей одновременно находятся в контакте с поверхностью опоры. Во время одного цикла ходьбы наблюдается два двухопорных периода. Первый из них наблюдается в начале опорной фазы эталонной ноги, второй — в ее конце
Во время двухопорной фазы обе ноги одновременно находятся в контакте с опорой. При нормальной скорости ходьбы время двойной опоры (наложение фаз) составляет около 22 % времени цикла (рис. 8.5).
Рис. 8.5. На опорные фазы двух ног при обычной скорости ходьбы накладывается примерно по 11 % (от общего времени цикла) перекрытия их двумя периодами двойной опоры. Опорная фаза при обычной ходьбе составляет примерно 60 % продолжительности цикла, фаза переноса — 40 %. Увеличение или уменьшение скорости изменяет и процентное соотношение продолжительности фаз
Подразделы фазы опоры и переноса. Традиционно фазы опоры и переноса делились на следующие подразделы: 1) опора, которая состоит из касания пяткой, опоры на полную стопу, середины опоры, отрыва пятки и отрыва пальцев; 2) переноса, который состоит из ускорения, середины переноса и замедления. Лаборатория изучения ходьбы в Медицинском центре Rancho Los Amigos (RLA) — «Дом друзей» (ДД) предложила для описания фаз ходьбы другой набор терминов. Терминология ДД может постепенно заменить старые термины. Читателю следует ознакомиться как с традиционной, так и с новой терминологией, поскольку в литературе могут встречаться оба метода описания ходьбы. Далее будут даны описания сначала в традиционных терминах, затем в терминологии ДД. Следует, однако, отметить, что эти терминологии не полностью эквивалентны и расположены в таком порядке, чтобы сравнение было провести легче. Традиционная терминология отталкивается от точек (моментов) во времени, тогда как терминология ДД использует временные отрезки.
8.1.1. Опорная фаза 1. Касание пяткой: относится к моменту, когда пятка выносимой вперед ноги касается опоры (рис. 8.6). ДД: начальный контакт относится к моменту, когда стопа выносимой вперед ноги касается опоры. При нормальной ходьбе точкой контакта является пятка. При нарушениях походки начальный контакт с опорой может производиться либо всей стопой, либо начинаться с пальцев ног.
Рис. 8.6. Касание пяткой: относится к моменту, когда пятка выносимой вперед ноги касается опоры. Касание правой пяткой на диаграмме представляет собой начало опорной фазы для правой ноги. Касание пяткой — синоним начального контакта
2. Опора на всю стопу, начинается сразу же после касания пятки; это точка, когда стопа полностью контактирует с опорой (рис. 8.7). ДД: нагрузочная реакция происходит немедленно после начального контакта и продолжается до отрыва контралатеральной ноги от опоры и конца двухопорной фазы.
Рис. 8.7. Постановка на всю стопу происходит сразу после касания пяткой и определяется как точка, при которой стопа полностью находится на опоре. Период нагрузочной реакции (ДД) продолжается от начального контакта до отрыва противоположной ноги от опоры в конце двухопорного периода
3. Середина опоры — это точка, в которой вес тела находится точно над опорной ногой (рис. 8.8).
Рис. 8.8. Середина опоры — это точка, в которой вес тела проходит точно над опорной ногой. Пунктирной линией на диаграмме выделен момент середины опоры правой ноги. Середина опоры охватывает период от полной постановки стопы до начала отрыва пятки
ДД: середина опоры начинается, когда контралатеральная конечность отрывается от опоры и продолжается до положения, при котором тело проходит над опорной конечностью (рис. 8.9)[2].
Рис. 8.9. Середина опоры (ДД) начинается, когда контралатеральная конечность отрывается от опоры и продолжает движение до позиции, в которой тело начинает двигаться вперед над опорной конечностью
4. Отрыв пятки — это точка, в которой пятка эталонной конечности отрывается от опоры (рис. 8.10).
Рис. 8.10. Отрыв пятки — точка, в которой пятка эталонной ноги (на диафрагме — правой) отрывается от поверхности опоры
ДД: граница опоры — это период от окончания середины опоры до точки непосредственно перед начальным контактом контралатеральной конечности, или следующий за отрывом пятки эталонной конечности (рис. 8.11).
Рис. 8.11. Период границы опоры (ДД) включает в себя интервал опорной фазы от конца середины опоры (ДД) до момента, наступающего сразу после отрыва пятки эталонной конечности (на диаграмме — правой) от опоры. Соответственно, отрыв пятки входит в период границы опоры
5. Отрыв пальцев — это точка, в которой только большой палец ипсилатеральной конечности находится в контакте с опорой (рис. 8.12).
Рис. 8.12. Отрыв пальцев определяется как точка, в которой только большой палец эталонной ноги (правой) касается опоры. Период от отрыва пятки до отрыва пальцев часто называют периодом отталкивания опорной фазы
ДД: предперенос обозначает период между отрывом пятки и отрывом пальцев (рис. 8.13).
Рис. 8.13. Предперенос (ДД) включает в себя интервал опорной фазы от конца границы опоры (сразу после того, как правая пятка отрывается от опоры, и левая пятка касается опоры) до момента отрыва пальцев от опоры. Предперенос не сопоставим в точности с отталкиванием, поскольку он не включает в себя отрыв пятки. По терминологии ДД, отрыв пятки происходит во время границы опоры
8.1.2. Фаза переноса 1. Ускорение начинается сразу после того, как большой палец эталонной (ипсилатеральной) ноги отрывается от опоры и продолжается до точки середины переноса, в которой переносимая или маховая нога находится точно под телом (рис. 8.14). ДД: перенос начинается в той же точке, где начинается ускорение и продолжается до момента максимального сгибания в колене эталонной (ипсилатеральной) конечности.
Рис. 8.14. Ускорение начинается с момента, когда большой палец эталонной (на диаграмме — правой) ноги отрывается от поверхности опоры. Начальный перенос (ДД) начинается примерно в той же точке, что и ускорение и продолжается до момента максимального сгибания колена эталонной ноги
2. Середина переноса происходит, когда ипсилатеральная конечность проходит непосредственно под телом (рис. 8.15).
Рис. 8.15. Середина переноса наблюдается, когда эталонная конечность проходит непосредственно под телом. На диаграмме правая нога только что прошла под туловищем. Период середины переноса считается от конца ускорения до начала замедления
ДД: середина переноса охватывает период, следующий непосредственно за максимальным сгибанием колена и продолжается до тех пор, пока большая берцовая кость находится в вертикальном положении (рис. 8.16).
Рис. 8.16. Середина переноса (ДД) — это период от максимального сгибания колена до момента, когда большая берцовая кость занимает вертикальное положение
3. Замедление наблюдается после середины переноса, когда большая берцовая кость выходит за перпендикуляр, а колено начинает разгибаться в преддверии постановки пятки. ДД: конечная стадия переноса включает в себя период от точки, в которой большая берцовая кость находится в вертикальной позиции до точки непосредственно перед начальным контактом (рис. 8.17).
Рис. 8.17. Замедление — это момент, когда колено разгибается при подготовке к постановке пятки. Конечная стадия переноса (ДД) включает в себя период, когда большая берцовая кость идет от вертикального положения к точке полного разгибания колена перед начальным контактом
Сравнение традиционной терминологии и обозначений ДД обнаруживает некоторые различия между ними. Однако представляется, что в основе этих различий лежит тот факт, что терминология ДД дает лучшие определения конкретных интервалов, чем традиционная. Иногда традиционная терминология не вполне адекватно определяет начальные и конечные точки интервала, например: где заканчивается опора на всю стопу и начинается середина опоры. В терминологии ДД каждый сегмент имеет четко обозначенное начало и хорошо различимую конечную точку, при этом раскладка дается не по точкам, а по интервалам. Далее мы приведем краткое сравнение традиционной терминологии с ДД (табл. 8.1). Подробное описание действий мышц и суставов каждой фазы будет дано в этой главе несколько позже.
Таблица 8.1 СРАВНЕНИЕ ТЕРМИНОЛОГИИ В ОТНОШЕНИИ ХОДЬБЫ
Традиционная ∙ ДД Постановка пятки ∙ Начальный контакт От постановки пятки до опоры на полной стопе ∙ Нагрузочная реакция От опоры на полной стопе до середины опоры ∙ Середина опоры От середины опоры до отрыва пятки ∙ Конечная стадия опоры Отрыв пальцев ∙ Предперенос От отрыва пальцев до ускорения ∙ Начальная стадия переноса От ускорения до середины переноса ∙ Середина переноса От середины переноса до замедления ∙ Конечная стадия переноса
8.2. Переменные времени и расстояния
Время и расстояние являются двумя основными параметрами движения, и измерение этих переменных дает основное описание походки. Временные переменные включают в себя: время опорной фазы, время одноопорной и двухопорной фаз, время переноса, время шага, время полушага, темп и скорость. Переменные расстояния — это длина горизонтального и вертикального шага, ширина опорной базы и угол отрыва пальцев от опоры. Эти переменные дают необходимую количественную информацию о походке человека и должны включаться в любое ее описание. На каждую из переменных могут влиять такие факторы, как возраст, пол, рост, размер и форма костных компонентов, распределение массы по сегментам тела, подвижность суставов, сила мышц, одежда и обувь, привычки и психологическое состояние. Однако обсуждение всех факторов, влияющих на походку, не является задачей данной работы. Время опоры — это количество времени, затрачиваемое при ходьбе на опорную фазу одной ноги. Время одноопорной фазы — это количество времени, затрачиваемое на нахождение на опорной поверхности только одной ноги. Время двухопорной фазы — это количество времени, которое человек проводит во время цикла ходьбы, касаясь опоры обеими ногами. Время двухопорной фазы обычно увеличивается с возрастом и в случаях нарушений равновесия. Время двухопорной фазы уменьшается при увеличении скорости ходьбы. Длина шага — это линейное расстояние между двумя последовательными событиями, совершаемыми при ходьбе одной и той же ногой. В общем, длина шага определяется при помощи измерения линейного расстояния от точки касания пяткой одной ноги до следующей постановки пятки этой же ноги (рис. 8.18).
Рис. 8.18. Длина шага определяется при помощи измерения расстояния от точки касания пяткой эталонной конечности до следующего касания пяткой той же ноги. На рисунке показаны два последовательных касания пяткой правой ноги и полушаг левой ногой
Длина шага включает в себя, по сути, все моменты одного цикла ходьбы. Шаг включает в себя два полушага: полушаг правой и полушаг левой ногой. Однако длина шага не всегда является удвоенной длиной полушага, потому что длина шагов правой и левой ноги может быть различной. Длина шага имеет сильные индивидуальные отличия, потому что на нее влияют длина ног, рост, возраст, пол и другие переменные. Длину шага можно привести к нормальному значению, разделив ее на длину ноги или на рост. Обычно длина шага уменьшается у пожилых людей и увеличивается при возрастании скорости ходьбы. В длину шага укладываются все события, происходящие во время цикла ходьбы. Продолжительность шага относится к количеству времени, требуемому для выполнения одного шага. Продолжительность шага и время одного цикла ходьбы — синонимы. Шаг длится приблизительно одну секунду. Сложные флуктуации времени шага во время нормальной, медленной и быстрой ходьбы рассматриваются как имеющие статистическую корреляцию с вариациями продолжительности шага в большой выборке. Представляется, что такие флуктуации являются характерными для нормальной ходьбы. Длина полушага — это линейное расстояние между двумя последовательными точками контакта противоположных конечностей. Обычно ее измеряют от точки касания опоры пяткой одной ноги до точки касания пяткой другой ноги (рис. 8.19).
Рис. 8.19. Длина полушага — это линейное расстояние между двумя последующими точками контакта противоположных ног. На рисунке показаны две последовательных точки контакта правой и левой конечностей
Сравнение полушагов правой и левой ноги показывает степень симметричности походки. Чем ближе длина полушагов, тем симметричнее походка. Вариабельность длины полушага минимальна, когда отношение длины полушага к его частоте равняется примерно 0,006 м/полушаг, или имеет то же значение при предпочтительной скорости ходьбы человека. Время полушага относится к количеству времени, затрачиваемого на один полушаг. Измеряют его обычно в с/полушаг. Если имеется слабость или боль в конечности, время полушага может уменьшаться с пораженной стороны и увеличиваться со стороны неповрежденной (более сильной или менее болезненной). Темп — это число полушагов, сделанных человеком в единицу времени. Темп измеряется числом полушагов в секунду или в минуту. Темп = N полушаги/время. При постоянной скорости укорочение полушага приведет к увеличению темпа. Lam-oreaux обнаружил, что если человек идет в темпе 80-120 полушагов в минуту, то между темпом и длиной шага имеется линейная зависимость. При ходьбе с увеличением темпа уменьшается время двойной опоры. Когда темп ходьбы приближается к 180 полушагам в минуту, двухопорная фаза исчезает, и человек переходит на бег. Частота полушагов или темп порядка 110 в минуту может рассматриваться как типичная для взрослых мужчин. Обычный женский темп — около 116 полушагов в минуту. Скорость ходьбы — это линейная скорость движения тела вперед, которую можно измерять в сантиметрах в секунду, метрах в минуту или в километрах (милях) в час. Скорость ходьбы = пройденная дистанция/время. При одной и той же скорости ходьбы женщины обычно идут более короткими и быстрыми шагами. Увеличение скорости до 120 шагов в минуту вызывается возрастанием, как темпа, так и длины шага, но при частоте свыше 120 полушагов в минуту увеличивается только темп. Ускорение — это изменение скорости во времени. Скорость измеряется в сантиметрах в минуту. По скорости ходьба обычно бывает медленной, свободной и быстрой. Свободная скорость ходьбы считается нормальной скоростью человека. Медленная и быстрая ходьба относятся к скоростям, когда человек идет быстрее или медленнее, чем ему привычно и удобно. Большая скорость обычно сопровождается увеличением темпа и длины шага, а также уменьшением угла отрыва пальцев от опоры. Однако есть определенная изменчивость способов, которые человек может избрать для повышения скорости хода. Некоторые люди предпочитают увеличивать длину шага, уменьшая при этом темп. Другие, наоборот, уменьшают длину шага и увеличивают темп. Скорость хода определяется при помощи умножения длины полушага на частоту. Ширина ОБ определяется измерением линейного расстояния между средней точкой пятки одной стопы и такой же точкой на другой стопе (рис. 8.20).
Рис. 8.20. Ширина опорной базы. Для ее измерения точкой отсчета считается центр пятки
Ширина опорной базы увеличивается, если возникают повышенные требования в отношении боковой устойчивости. Это наблюдается у пожилых людей и маленьких детей, только начинающих ходить. У малышей центр тяжести (ЦТ) выше, чем у взрослых, и более широкая ОБ необходима для сохранения устойчивости. В норме у взрослых людей ОБ равна примерно 8,89 см, причем вариабельность ее может быть в пределах от 2,5 до 12,70 см. Угол разворота пальцев представляет собой угол постановки стопы. Он определяется как угол между линией направления движения и линией, проходящей через второй палец ноги и середину пятки. У мужчин при свободной ходьбе этот угол обычно равен 7° (рис. 8.21). При возрастании скорости ходьбы у здоровых людей этот угол обычно уменьшается.
Рис. 8.21. Угол разворота пальцев. Угол, образованный линией направления движения стоп и линией, проходящей через центр пятки и второй палец стопы, представляет собой угол постановки стопы. Нормальный угол для мужчин при свободной ходьбе составляет 7°
8.3. Движения суставов
Еще один способ характеризовать походку — измерение траекторий нижних конечностей и суставных углов. Для получения данных о суставных углах и траекториях конечностей при нормальной и аномальной ходьбе использовалось сложное оборудование, такое как фотоаппараты со стробоскопическими вспышками, кинокамеры, электрогониометры и компьютеры. Для анализа и демонстрации данных, полученных при фотографировании, можно использовать диаграммы, на которых делается сопоставление суставных углов и углов нижних конечностей друг с другом, так называемые сравнительные угловые диаграммы. Сравнительные угловые диаграммы могут давать нам объективную оценку динамики лечения пациента, поскольку разная походка всегда будет давать диаграммы очень характерного вида. При анализе наблюдений используются более простые и менее объективные методы, дающие, однако, наблюдателю возможность сделать заключение о том, насколько угол или движение конкретного сустава соответствуют, или не соответствуют норме. Например, наблюдатель может установить, что у идущего человека сгибание колена в конце середины опоры на 5° больше, чем считающееся нормальным. Вслед за этим наблюдатель должен определить, почему у пациента колено сгибается больше, чем нужно. Одним из недостатков метода наблюдения является то, что он требует очень серьезной подготовки и практического опыта: очень непросто зрительно распознать отдельный сегмент походки, в котором определенный суставной угол имеет отклонение от нормы, да еще сделать это, когда пациент находится в движении. Еще один недостаток анализа наблюдений ходьбы в том, что он имеет низкую достоверность. Наблюдение с последующим анализом используется в клинике из-за следующих преимуществ: он не является обременительным для ходячих пациентов и менее дорогостоящ, чем другие сложные методы анализа. Кроме того, хорошо подготовленные специалисты могут из простого наблюдения извлечь значительное количество информации. Лаборатория ходьбы в медицинском центре ДД разработала регистрационные формы для анализа наблюдений за ходьбой, которые помогают систематически концентрировать внимание на разных частях тела при ходьбе. Исходя из нашего опыта, эти формы оказались весьма полезны в учебных целях. Амплитуды движений (АД) суставов, представленные в табл. 8.2, были адаптированы по формам анализа ходьбы ДД. Характеристики движений, представленные в таблице, это значения, получаемые для конца каждой из фаз. Однако ДД не определяла ни критерии отбора групп, ни скорость ходьбы при оценке амплитуд движения суставов. Таким образом, читатель может столкнуться с тем, что степени углового отклонения будут сильно отличаться у разных авторов, поскольку может меняться скорость ходьбы, а группы, используемые для создания нормальных критериев, могут различаться по возрасту и полу. Приблизительно общую АД, требуемую для нормальной ходьбы, можно определить из значений суставных углов каждого сустава в цикле ходьбы. Например, в табл. 7.2 мы видели, что коленный сустав находится в разгибании (0°) при начальном контакте опорной фазы и согнут на 60° в фазе переноса. Соответственно, человек может прийти к выводу, что человеку при ходьбе обязательно полностью разгибать колено и сгибать его обязательно на 60°. Если сгибание колена у человека ограничено 10–15°, то следует считать, что паттерн ходьбы у него (нее) указывает на существенные отклонения от нормы. Кинематические данные о нормальных значениях в каждом сегменте цикла ходьбы также помогают описывать изменения в движениях суставов, происходящие в каждой из фаз. Например, изучение табл. 8.2 показывает, что колено разогнуто в момент начального контакта и согнуто на 15° в конце нагрузочной реакции. Соответственно, колено во время периода нагрузочной реакции должно сгибаться. В периоде середины опоры колено разгибается, поскольку оно переходит от угла сгибания в 15° в конце нагрузочной реакции к 5° в конце фазы середины опоры. Опять же, обратившись к табл. 8.2, мы можем определить, что колено продолжает разгибаться в конечной стадии опоры и снова сгибается во время предпереноса. Бедро начинает опорную фазу в согнутом состоянии и разгибается в течение всей фазы, пока не достигает 10° разгибания (гиперразгибание) в конце конечной стадии опоры. Сгибание бедра начинается и продолжается в течение всего предпереноса. Аналогичные описания движения сустава, изучив средние величины, данные для суставных углов в каждом из сегментов цикла для каждого периода, можно получить из табл. 8.2 для лодыжки в опорной фазе и для бедра, колена и лодыжки в фазе переноса.
8.4. Детерминанты ходьбы
Хотя читатель и был ознакомлен ранее со многими переменными, используемыми для описания и определения ходьбы, мы пока не упоминали еще об одной группе компонентов. Эти компоненты называются детерминантами ходьбы. Впервые они были описаны Saunders и сотрудниками в 1953 г., и более подробно разработаны Inman с коллегами в 1981 г. Полагают, что они представляют подстройки, производимые тазом, бедрами, коленями и лодыжками, которые помогают свести движения ЦТ тела к минимуму. Обязанности детерминант ходьбы сводятся к тому, чтобы уменьшить вертикальные и латеральные движения тела, ЦТ и тем самым снизить расход энергии и сделать ходьбу эффективнее (рис. 8.22).
Рис. 8.22. Вертикальное смещение центра тяжести тела при нормальной ходьбе создает плавную синусоидальную кривую. Самая нижняя точка на кривой наблюдается в период двойной опоры. Наивысшая точка кривой совпадает с серединой опоры, когда туловище находится непосредственно над опорной ногой. На рисунке показаны самая нижняя и самая высшая точки кривой
Имеется шесть следующих детерминант: 1) латеральный наклон таза (опускание таза во фронтальной плоскости); 2) сгибание колена в опорной фазе; 3) взаимодействия коленей; 4) взаимодействия лодыжек; 5) ротация таза в поперечной плоскости; 6) физиологический вальгусный разворот колена наружу. Порядок рассмотрения детерминант будет соответствовать их функции, и не обязательно связан с их очередностью в цикле ходьбы. Первые четыре детерминанты помогают минимизировать вертикальный подъем ЦТ. Пятая детерминанта предотвращает снижение ЦТ тела, а шестая — снижает движение ЦТ из стороны в сторону. 1. Латеральный наклон таза (опускание таза во фронтальной плоскости). При одноопорном положении (односторонняя поддержка веса) комбинированный вес ГРТ и маховой ноги должен быть уравновешен на одной нижней конечности. Во время этого периода ЦТ приходит на синусоидальной кривой наивысшую точку латеральный наклон таза (снижение) со стороны безопорной конечности (маховой ноги), делает подъем таза меньше, чем в случае, если бы таз не производил такого движения, поскольку этот «спад» вызывает относительное приведение опорного бедра в опорной фазе и относительное отведение опорной конечности (рис. 8.23).
Рис. 8.23. Латеральный наклон таза во фронтальной плоскости удерживает пик синусоидальной кривой ниже, чем если бы он оказывался без такого опускания таза, потому что оно вызывает приведение опорного бедра. Латеральный наклон таза (опускание таза) контролируется отводящими мышцами левого бедра
Наклон таза контролируется отводящими мышцами маховой ноги. Например, опускание таза со стороны правой маховой ноги контролируется изометрическими и эксцентрическими сокращениями отводящих мышц левого бедра. 2. Сгибание колена в опорной фазе. Сгибание колена в положении середины опоры, когда ЦТ находится в самой высшей точке, представляет собой еще одну подстройку, которая помогает сдержать подъем ЦТ и не позволить ему пройти над телом на такой высоте, как это было бы при полностью выпрямленном колене. 3–4. Взаимодействия колена, лодыжки и стопы. Движения в коленном суставе происходят в сочетании с движениями в лодыжке и стопе. Они выполняют функцию выравнивания траектории ЦТ тела так, что она образует синусоидальную кривую. Сопряженные движения колена, лодыжки и стопы предотвращают резкие изменения вертикальных перемещений ЦТ тела сверху вниз и наоборот. Изменение смещения ЦТ от направления вниз при постановке пятки к движению вверх в положении на полной стопе (нагрузочная реакция) завершается сгибанием колена, подошвенным сгибанием лодыжки и пронацией стопы. Эти сочетанные движения выполняют относительное укорочение конечности и тем самым не позволяют выполнить резкий подъем ЦТ после постановки пятки. Если эти движения не выполняются в сочетании друг с другом, ЦТ поднимется резко, после того как большая берцовая кость проходит над таранной костью. Другой случай, при котором взаимодействие колена, лодыжки и стопы играет важную роль — резкое снижение ЦТ тела после середины опоры. Комбинация подошвенного сгибания лодыжки, супинации стопы и разгибания колена при отрыве пятки замедляет снижение ЦТ тела за счет относительного удлинения опорной конечности. 5. Ротация таза в поперечной плоскости. Передняя и задняя ротация таза в поперечной плоскости сопровождается при ходьбе движениями ног вперед и назад (рис. 8.24).
Рис. 8.24. Ротация таза в поперечной плоскости. На рисунке показана ротация таза слева вперед со стороны маховой конечности. Правый тазобедренный сустав служит осью движения. Брусок, представляющий собой таз, показывает явную ротацию назад, которая одновременно происходит на правой стороне таза. Ротация таза вызывает относительное удлинение конечностей и тем самым минимизирует падение ЦТ тела, наблюдающееся в двухопорной фазе
Ротация вперед происходит со стороны маховой конечности, при этом осью вращения таза служит тазобедренный сустав нагруженной ноги. Таз начинает движение вперед на предпереносе и продолжает его, пока маховая нога движется вперед в стадии начального переноса. В точке максимального подъема ЦТ тела в середине опоры, вращение таза вперед приводит таз в нейтральное положение относительно ротации. Ротация таза вперед продолжается дальше нейтрального положения со стороны переноса, проходя стадию конца переноса и вплоть до начального контакта. Общее количество ротации таза невелико: примерно 4° как со стороны маховой, так и опорной ноги, т. е. всего 8°. Результатом ротации таза является явное удлинение нижних конечностей. Маховая нога удлиняется в окончании переноса за счет ротации таза вперед, а опорная нога удлиняется в стадии предпереноса за счет заднего положения таза. Таким образом, когда ЦТ в стадии двойной опоры максимально опускается, удлиняется как опорная, так и маховая нога. Такое относительное удлинение препятствует избыточному снижению ЦТ и поддерживает его на более высоком уровне, чем тот, который наблюдался бы при отсутствии ротации. Функции ротации таза состоит в минимизации снижения ЦТ, тогда как функцией первых двух детерминант является минимизация подъема ЦТ. 6. Физиологический вальгусный разворот колена наружу. Физиологический вальгусный разворот сустава уменьшает ширину ОБ по сравнению с той, которая наблюдалась бы, если бы диафизы бедренной и большой берцовой кости образовывали вертикальную линию от большого бугра бедренной кости (рис. 8.25). Таким образом, поскольку ОБ является относительно узкой, для смещения ЦТ с одной ноги на другую, требуется небольшое латеральное движение таза.
Рис. 8.25. Физиологический разворот колена.
Нормальный физиологический вальгусный разворот колена уменьшает ширину опорной базы по сравнению с тем, какой она была бы при вертикальном положении ноги. Затемненная левая нога на рисунке представляет гипотетическое вертикальное положение большой берцовой и бедренной кости. На рисунке четко видно, что в этом случае опорная база существенно шире при вертикальном положении ноги, чем при ее нормальной позиции Хотя шесть детерминант и их роль в уменьшении вертикальных и латеральных колебаний ЦТ в общем принимались как аксиома в течение многих лет, в последнее время многие исследователи начали подвергать сомнениям обоснованность важности их роли при ходьбе. Card и Childress изучали действие сгибания колена в опорной фазе на вертикальные перемещения туловища при нормальной ходьбе. Авторы сравнивали вертикальное смещение туловища при сгибании колена с вертикальным смещением, но без сгибания. Хотя сгибание колена уменьшало максимальные значения вертикального смещения туловища на несколько миллиметров, точно так же уменьшались и минимальные значения, так что собственно амплитуда оставалась неизменной. Более того, эти же авторы обнаружили, что сгибание колена происходит до достижения туловищем максимальной высоты подъема, что указывает на то, что коленное сгибание не играет доминирующей роли в уменьшении максимального подъема ЦТ тела. Авторы предполагают, что коленное сгибание в опорной фазе связано не столько с уменьшением вертикальных колебаний тела, сколько выполняет амортизирующую функцию при переносе веса тела на опорную ногу во время отрыва пальцев контралатеральной ноги от опоры. Проведя критическое исследование такой детерминанты, как латеральный наклон таза, Card и Childress пришли к заключению, что он оказывает существенно меньшее влияние на вертикальное перемещение ЦТ тела, чем было принято считать. Авторы обосновывали свои выводы на данных, которые свидетельствовали о том, что наклон таза вообще не оказывает никакого влияния на вертикальные колебания туловища при скорости ходьбы 1–2 м/с. Card и Childress, проводя аналогичные исследования, обнаружили, что максимум наклона таза достигается в начале фазы переноса и после завершения 25 % цикла. Таз практически не влияет на вертикальные колебания туловища. Кроме того, движения таза не изменяли амплитуду колебания ЦТ тела. Pandy and Berme также пришли к выводу, что наклон таза не является столь доминантным фактором, как считалось ранее. Авторы также предположили, что основной задачей отводящих мышц бедра является стабилизация таза. Несомненно, прежде чем новые роли коленного сгибания и наклона таза будут приняты, потребуется проведение новых исследований. Однако результаты, полученные учеными, указывают на то, что необходимо постоянно вести проверку теорий, на основании которых мы работаем и тех предположений, которыми мы пользуемся при объяснении сложного человеческого поведения.
Глава 9 ЭНЕРГЕТИЧЕСКИЕ ТРЕБОВАНИЯ
Кинематические аспекты ходьбы были представлены ранее. Далее читатель ознакомится с некоторыми силами, участвующими в процессе ходьбы. Силу надо использовать для того, чтобы придать телу и его сегментам ускорение или замедлить его движение. Мышцы используют метаболическую энергию для выполнения механической работы, превращая эту энергию в механическую. Общую метаболическую стоимость локомоций можно измерить при помощи анализа потребления кислорода за единицу пройденного расстояния. Duff-Raffaele с сотрудниками исследовали, какая доля потребляемой энергии расходуется на вертикальный подъем ЦТ тела во время ходьбы. Поскольку кинетическая энергия пропорциональна квадрату скорости, затраты метаболической энергии на подъем ЦТ тела при малых скоростях ходьбы относительно невелики. Ученые обнаружили, что при комфортных скоростях ходьбы в 1,3 м/с и 1,8 м/с более половины (53,2 и 62,8 % соответственно) всей потребляемой энергии уходит на работу по подъему ЦТ. На медленных скоростях в 0,5 м/с и 0,9 м/с на работу по подниманию ЦТ приходилось всего 21,6 и 37,7 % от общего потребления энергии. Davies показал, что общая калорическая стоимость на единицу массы при ходьбе на 1609 м сильно различается у молодых и пожилых людей. Для пожилых мужчин и женщин в возрасте 65–78 лет характерен повышенный расход энергии при более медленных, чем у молодых людей, скоростях хода. Относительно низкая скорость ходьбы, характерная для людей пожилого возраста, представляется одной из причин повышения затрат метаболической энергии на единицу расстояния, причем это явление наблюдается как у пожилых людей, так и людей любой другой возрастной группы, если они стараются идти медленно. Данные оказались довольно неожиданными, потому что при медленной ходьбе энергетическая стоимость поднимания ЦТ тела значительно ниже, чем при нормальной и средней скорости ходьбы. Кинетическая энергия пропорциональна квадрату скорости, а метаболическая стоимость преобразования ее при невысоких скоростях ходьбы относительно невелика. Duff-Raffaele и сотрудники предположили, что такое увеличение затрат энергии при низкой скорости ходьбы, по сравнению с нормальной скоростью, связано прежде всего с внутренней работой мышц. Основной задачей локомоции является перемещение тела в пространстве с минимальными затратами энергии. Если преодолевается длинная дистанция, но потребление кислорода при этом невелико, то метаболическая стоимость такой ходьбы невысока. Потребление кислорода у человека, идущего со скоростью 4–5 км/ч, в среднем равняется 100 мл/кг веса тела в минуту. Максимальная эффективность достигается тогда, когда для преодоления определенного расстояния требуется минимальное количество энергии. Если скорость ходьбы возрастает и превышает привычную для данного человека, увеличивается и расход энергии на единицупреодолеваемого расстояния. Также, как уже говорилось выше, увеличение энергозатрат наблюдается и при снижении скорости ходьбы ниже привычной.9.1. Механическая энергия
Подсчет расхода механической энергии при ходьбе подразумевает анализ обмена механической энергией между разными сегментами тела. Существует два вида механической энергии — кинетическая и потенциальная. Кинетическая энергия имеет поступательный и ротационный компоненты. Поступательная энергия связана с энергией линейного движения (и скорости) сегмента в пространстве. Ротационная энергия связана с круговой скоростью сегмента. Потенциальная энергия есть количество поднятой на некоторую высоту массы, умноженное на высоту подъема. Иначе говоря, если масса находится на какой-либо высоте, на нее действует сила тяжести, принуждая ее к падению, и, таким образом, мы говорим, что данная масса обладает потенциальной энергией. Количество потенциальной энергии, которой обладает поднятая на высоту масса, равно количеству кинетической энергии, требуемой для подъема той же массы с преодолением силы тяжести. Когда движение массы кверху останавливается в верхней точке, кинетическая энергия превращается в энергию потенциальную. Когда масса падает вниз, потенциальная энергия при ускорении вновь преобразуется в кинетическую. При ходьбе кинетическая энергия расходуется на подъем массы тела, сконцентрированной в ЦТ. Чем выше поднимается ЦТ, тем больше кинетической энергии расходуется. Когда в стадии середины опоры ЦТ достигает наивысшей точки, тело обладает максимумом потенциальной энергии. Опускание тела вниз происходит за счет той же потенциальной энергии, но для контроля этого движения требуется и кинетическая энергия. Она возникает при преобразовании потенциальной энергии в кинетическую во время движения вниз. Трансформация потенциальной энергии в кинетическую и обратно происходит на протяжении всего цикла ходьбы. Если ходьба механически эффективна, энергия сохраняется, и ее требуется чуть больше, чем энергии, необходимой для того, чтобы начать движение. Если изменения положения ЦТ тела оказываются выраженными и резкими, тратится больше энергии. Таким образом, затраты энергии при ходьбе часто приравниваются к движениям ЦТ тела. Однако, поскольку между сегментами тела при ходьбе тоже происходит энергообмен, более точная оценка обмена энергии при измерении механической эффективности ходьбы подразумевает посегментный расчет.
9.2. Положительная и отрицательная работа
Кинетическая энергия поставляется телу мышцами. Когда мышцы выполняют положительную работу, такую, как концентрическое сокращение, они повышают общую энергию тела и передают ее к костным компонентам. При темпе от 105 до 113 полушагов в минуту наблюдается короткий всплеск положительной работы (генерация энергии), когда происходит концентрическое сокращение разгибателей бедра между постановкой пятки и постановкой ноги на полную стопу. В это же время разгибатели колена выполняют отрицательную работу (поглощение энергии) за счет своего эксцентрического действия по контролю коленного сгибания. Негативная работа также производится подошвенными сгибателями, когда нога совершает ротацию над стопой в опорной фазе. Это наблюдается в период от постановки на полную стопу и в течение всего периода середины опоры. Однако в это же время производится положительная работа разгибателями колена (разгибание колена после постановки на полную стопу). С одной стороны, положительная работа подошвенных сгибателей и сгибателей бедра в конечной стадии опорного периода и начале переноса повышает уровень энергии тела. В середине переноса (с противоположной стороны это будет середина опоры) потенциальная энергия тела достигает максимума. С другой стороны, в конце переноса отрицательная работа выполняется разгибателями бедра. Они совершают в этот период эксцентрическую работу по замедлению ноги и подготовке ее к начальному контакту с опорой. В этой точке происходит снижение энергетического уровня тела. Положительная энергия, генерируемая мышцами бедра во время концентрического сокращения при нормальной ходьбе мужчины с темпом 180 полушагов в минуту, почти удваивает количество энергии, поглощенной мышцами бедра во время эксцентрического сокращения. В голеностопном суставе положительная энергия, которая генерируется концентрическим мышечным действием, почти в 3 раза превышает количество энергии, поглощенной во время эксцентрического действия. В соответствии с моделью, разработанной Kepple, эксцентрическая активность подошвенных сгибателей создает ускорение вперед ГРТ и ЦТ, поскольку момент, действующий через сустав, создает в нем силу реакции, которая передается по кинематической цепочке и придает ускорение всем ее звеньям. Ускорения, создаваемые суставом, не зависят от скорости и, таким образом, от типа сокращения. Колено, в отличие от бедра и лодыжки, поглощает в цикле ходьбы при эксцентрическом мышечном действии больше энергии, чем вырабатывает. При медленной и нормальной скорости ходьбы у здоровых людей сгибатели и разгибатели бедра дают примерно 25 % всей концентрической работы. Подошвенные сгибатели лодыжки дают около 66 % и около 8 % — разгибатели колена. Сумма всех приростов энергий за данный период выражается в абсолютной величине положительной работы. Аналогичным образом сумма всех поглощенных энергий за этот же период дает количество проделанной отрицательной работы. Работа, необходимая для перемещения тела при ходьбе, есть абсолютная сумма положительных и отрицательных энергетических изменений в теле. Кривая общей энергии тела дает нам показатель затрат механической энергии при прохождении конкретной дистанции. Eng и Winter обнаружили, что хотя 74 % всей работы бедра выполняется в сагиттальной плоскости, 23 % его работы в форме эксцентрического сокращения отводящих мышц бедра, направленного на контроль ухода таза вниз во фронтальной плоскости. Kepple показал, что моменты отводящих мышц не оказывают существенного влияния на вертикальное ускорение ГРТ во время одноопорной фазы, поскольку момент отведения бедра, удерживающий уровень ЦТ, также вызывает ускорение сгибателя колена, а это уже ведет к потере устойчивости ноги. Разгибателям колена проходится сокращаться, чтобы предотвратить такое нарушение равновесия.
Глава 10 КИНЕТИКА ХОДЬБЫ
10.1. Внешние и внутренние силы
Для того чтобы лучше понимать, что такое энергетические требования и какова роль детерминант при ходьбе, необходимо знать, какие силы принимают здесь участие. Внешние силы, действующие на тело при ходьбе, это: сила инерции, сила тяжести и сила реакции опоры (СРО). Величина и направление внешних сил, таких, как СРО, можно определить при помощи таких приборов, как тензометрическая платформа. Сила инерции порождается инерционными свойствами сегментов тела. Она пропорциональна ускорению сегмента. Сила инерции действует в направлении, противоположном направлению ускорения. Сила тяжести действует по вертикали вниз через центр массы каждого сегмента. Сила реакции опоры — это сила, с которой опора воздействует на стопу. Она равна по величине и противоположна по направлению той силе, которую тело передает на опору через стопу (рис. 10.1).
Рис. 10.1. Сила реакции опоры (СРО) — это сила, с которой опора воздействует на стопу. СРО передается через стопу на ногу и далее — на все тело
СРО, вероятно, является самой важной силой при любых локомоциях, таких, как ходьба, различные прыжки и скачки и бег. СРО может воздействовать на многие точки стопы, но считается, что есть точка, через которую она действует. Эта точка называется центром давления (ТТД). Точно таким же образом ЦТ тела считается точкой, через которую проходит воздействие силы тяжести. ЦД во время ходьбы движется по определенной траектории и создает определенный паттерн. У здоровых людей при ходьбе босиком этот паттерн отличается от наблюдаемого при ходьбе в обуви. При ходьбе босиком ЦД начинается на заднелатеральном крае пятки в начале опорной фазы и двигается почти линейно посередине стопы, оставаясь чуть снаружи средней линии, затем он смещается медиально через переднюю часть стопы с большой концентрацией по плюсневому разрыву. Затем, во время конечной стадии опоры, СД смещается ко второму и первому пальцам (рис. 10.2).
Рис. 10.2. Траектория перемещения центра давления (ЦД) показана положениями черной точки при постановке пятки (a); положении на полной стопе (b); в конце середины опоры (c) и при отрыве пальцев от опоры (d). Траектория ЦД имеет индивидуальные отличия и может изменяться в зависимости от типа обуви
Внутренние силы создаются прежде всего мышцами. Мышечная сила является мерой интенсивности выполняемой работы и равняется моменту силы сустава, умноженному на его угловую скорость. Для определения мощности используется формула P = F∙v, где F — это сила (прилагаемая в определенном направлении), а v — скорость движения в том же направлении. P измеряется либо в ваттах, либо в ньютонах на метр за секунду (Н м/с). Связки, сухожилия, капсулы суставов и костные компоненты помогают мышцам, оказывая сопротивление, передавая или поглощая силу. Мышечная активность определяется при помощи электромиографии (ЭМГ), т. е. методики, при которой регистрируется электрическая активность работающих мышц. Эта методика широко использовалась для исследования особенностей мышечной деятельности во время ходьбы. ЭМГ часто применяют вместе с тензометрическими платформами, киносъемкой и электрогониометрией, чтобы определить временные точки конкретной мышечной активности в цикле ходьбы. Однако регистрация ЭМГ дает информацию только о том, есть ли активность в определенной мышце, и если да, то когда эта мышца работает. ЭМГ не может ответить на вопрос, почему мышцы работают и какую силу они развивают. ЭМГ исследования ходьбы используются для проверки и подтверждения теоретических моделей, при помощи которых пытаются объяснить, почему мышцам надо противодействовать силам, действующим при ходьбе. При этом все теоретические модели разрабатываются для того, чтобы объяснить мышечную активность, обнаруженную при помощи ЭМГ.
10.2. Анализ в сагиттальной плоскости
Виды анализа, представленные в данной части, включают в себя определение СРО относительно суставов нижних конечностей и кинематические данные. Связь вектора СРО (ВСРО, переднезадний и медиально-латеральный) с осями голеностопного, коленного и тазобедренного суставов используется для того, чтобы показать, какой тип момента (сгибание/разгибание, отведение/приведение) действует в суставе. Величина момента, которая определяется при помощи измерения длиной его плеча (ПМ, длина перпендикуляра ВСРО, считающаяся от оси сустава), не представлена на рисунках нигде, т. е. не делалось попыток сделать расстояние ВСРО от оси сустава эквивалентным реальной длине ПМ. Расположение ВСРО, положение суставов и мышечная деятельность, которые были использованы при создании иллюстраций, были взяты из опубликованных исследований нормальной ходьбы человека. В части II (гл. 5) давался обзор моментов сгибания и разгибания. В вертикальном положении, когда линия силы тяжести (ЛСТ) находится на расстоянии от оси сустава, вокруг сустава создается гравитационный момент, который грозит нарушить равновесие сил, действующих на сустав. Для того чтобы предотвратить движение сустава, в действие вводится определенная мышца или группа мышц, противодействующая моменту и, таким образом, сохраняющая равновесие. В динамической ситуации, такой как ходьба, движение сустава необходимо и желательно. * * *
ПРИМЕР 1. Если, с одной стороны, в определенной фазе ходьбы необходимо сгибание колена, и на коленный сустав действует момент сгибания, то момент сгибания является желательным. Для того чтобы контролировать сгибание колена, может потребоваться работа мышц. Если контроль необходим, то для контроля сгибания необходимо эксцентрическое мышечное сокращение (рис. 10.3,а). Если, с другой стороны, в колене имеется момент сгибания, а желательным движением является разгибание коленного сустава, для противодействия моменту сгибания и разгибания колена необходимо концентрическое сокращение разгибателей колена (рис. 10.3,b).
Рис. 10.3. Действие момента сгибания, созданного СРО, на колено: a — при этом сгибание колена является желательным движением, соответственно для контроля количества коленного сгибания необходимо эксцентрическое сокращение четырехглавой мышцы бедра; b — на колено действует момент сгибания, созданный СРО; при этом желательным движением является разгибание колена. Соответственно четырехглавая мышца должна выполнить концентрическое сокращение для противодействия моменту сгибания и разгибания коленного сустава
* * * Опорная фаза. Необходимый при ходьбе тип мышечной активности (эксцентрический, концентрический или изометрический) зависит от характера моментов, действующих в области сустава опорной конечности и желательного направления движения. Если момент ВСРО вызывает движение костных компонентов в нужном направлении, то мышечная функция обычно бывает контрольной или ограничительной (эксцентрическое сокращение). * * *
ПРИМЕР 2. В стадиях цикла от начального контакта и в течение нагрузочной реакции (постановка пятки и вся стадия опоры на полную стопу), момент подошвенного сгибания действует в области голеностопного сустава, поскольку результирующий ВСРО находится позади оси сустава (рис. 10.4). Подошвенное сгибание является желательным движением, поскольку необходимо для занятия стопой положения на опоре, в котором она бы могла держать вес тела. Однако если эксцентрическая мышечная активность не контролирует подошвенное сгибание, стопа будет шлепаться на опору совершенно неуправляемым образом.
Рис. 10.4. В стадии от постановки пятки до опоры на полную стопу существует момент подошвенного сгибания в области голеностопного сустава. Подошвенное сгибание является желательным движением, необходимым для расположения стопы на поверхности опоры. Тыльные сгибатели действуют по эксцентрическому типу, контролируя подошвенное сгибание и не давая стопе бесконтрольно шлепнуться на опору * * * Несколько иная ситуация существует в коленном суставе во время середины опоры. Во время этой стадии колено разгибается от 15° сгибания в конце нагрузочной реакции до 5° в конце середины опоры. В колене существует момент сгибания, соответственно, сгибание является нежелательным движением. Необходимо выполнить концентрическое сокращение разгибателей колена для противодействия моменту сгибания и последующего разгибания сустава. Аналогичным образом при помощи определения положения результирующего ВСРО относительно оси сустава можно исследовать каждый сегмент опорной фазы и оценивать моменты, действующие в области сустава в сагиттальной, фронтальной и поперечной плоскостях. Знание того, какое именно движение в суставе является желательным, полученное при кинематическом анализе, используется вместе с определением результирующего ВСРО для того, чтобы определить тип мышечной деятельности, нужной для выполнения или контроля желательного движения. Иногда положение результирующего ВСРО меняется как в пределах стадии, так и между стадиями. Соответственно, мышечная деятельность изменяется от эксцентрической до концентрической, и наоборот. Эти изменения типа мышечной активности объясняют и энергетические изменения, которые наблюдаются во время ходьбы. * * *
ПРИМЕР 3. От начального контакта до конца середины опоры голеностопный сустав движется от нейтрального положения при начальном контакте до 15° подошвенного сгибания в конце нагрузочной реакции и до 10°тыльного сгибания к концу стадии середины опоры. Изменения ВСРО — от положения позади голеностопного сустава при начальном контакте до позиции спереди него во время середины опоры.* * * Таким образом, при начальном контакте и во время нагрузочной реакции (от постановки пятки и до опоры на полной стопе) существует момент подошвенного сгибания, и голеностопный сустав движется в направлении этого сгибания. Эксцентрическое сокращение подошвенных сгибателей контролирует движение, и при этом выполняется отрицательная работа. Момент, действующий в области голеностопного сустава в конце нагрузочной реакции, меняется от подошвенного сгибания к тыльному сгибанию. Момент тыльного сгибания работает в течение всей стадии середины опоры. Для контроля тыльного сгибания и предотвращения слишком быстрого продвижения большой берцовой кости требуется эксцентрическое сокращение подошвенных сгибателей. Момент тыльного сгибания продолжается до конца опорной фазы. Mueller показал, что максимальное значение крутящего момента подошвенных сгибателей и АД тыльного сгибания взаимосвязаны, и вместе вносят существенный вклад в моменты силы подошвенных сгибателей и мощность. В конце опорной фазы, во время предпереноса, желательным движением является подошвенное сгибание. Таким образом, активность подошвенных сгибателей меняется от эксцентрической до концентрической. Энергетические изменения во время этой фазы в нижней части ноги являются суммой положительных и отрицательных энергетических изменений, которые наблюдались в результате эксцентрической и концентрической мышечной деятельности. Фаза переноса. Во время фазы переноса СРО отсутствует, поскольку отсутствует контакт стопы с опорой. Маховая нога движется по открытой кинематической цепочке. Мышечная деятельность здесь нужна для ускорения и замедления движения маховой ноги, а также для ее подъема и удерживания с преодолением силы тяжести в таком положении, чтобы стопа не касалась почвы и находилась в оптимальном положении для постановки пятки. Ускорение создается ранней концентрической активностью сгибателей бедра и разгибателей колена. Во время начала переноса сгибатели бедра действуют концентрически для запуска маха ноги вперед. Во время середины переноса и в стадии окончания переноса они пассивны. Замедление маховой ноги в стадии окончания переноса производится преимущественно эксцентрическим сокращением разгибателей бедра и сгибателей колена. На уровне голеностопного сустава, передняя большеберцовая мышца, длинная мышца-разгибатель пальцев и длинный разгибатель большого пальца стопы выполняют изометрическое сокращение, удерживая голеностопный сустав в нейтральном положении и не давая стопе и пальцам зацепиться за опору.
10.3. Анализ во фронтальной плоскости
В ранней стадии опорной фазы ГРТ быстро продвигаются вперед и отклоняются вбок на опорную ногу. Быстрое латеральное отклонение ГРТ на опорную конечность создает потребность в латеральной устойчивости тазобедренного, коленного и голеностопного суставов (рис. 10.5).
Рис. 10.5. Быстрый латеральный перенос веса, возникающий в начале опорной фазы, требует устойчивости бедра, колена и лодыжки
Когда вес тела переходит на опорную ногу, необходима мышечная поддержка, в частности, потому, что бедро, колено и лодыжка находятся в свободно упакованных положениях. Стабилизация таза в тазобедренном суставе обеспечивается активностью средней ягодичной мышцы, малой ягодичной мышцы и широкой фасцией. Средняя ягодичная мышца со стороны опоры контролирует латеральное снижение таза со стороны маховой ноги. Быстрый перенос веса и требование сохранять равновесие на одной ноге создают вальгусное отклонение в коленном и голеностопном суставах, когда вес тела приходится на ногу. С медиальной стороны коленный сустав получает поддержку от медиальной широкой мышцы бедра, полусухожильной мышцы и тонкой мышцы. Эти мышцы противодействуют вальгусному отклонению в колене и тем самым препятствуют увеличению нормального физиологического вальгуса. В лодыжке и стопе вес тела передается от пятки (при начальном контакте) по внешнему краю стопы (во время нагрузочной реакции). В конце нагрузочной реакции все пять плюсневых (метадорзальных) костей оказываются под нагрузкой. Далее, вес переносится по головкам метадорзальных костей в стадии окончания опоры к большому пальцу стопы в предпереносе. Вес приходится на заднюю часть стопы примерно на протяжении 43 % опорной фазы. Пронация стопы в подтаранном суставе начинается во время постановки пятки преимущественно потому, что нагрузка на пятку идет латеральнее оси движения. Пронация в подтаранном суставе длится примерно в течение 25 % времени опорной фазы и является реакцией на прием веса. Пронация в подтаранном суставе сохраняет подвижность поперечного сустава и тем самым позволяет стопе адаптироваться к поверхности опоры. Передняя большеберцовая мышца является единственным обратным преобразователем, активным во время постановки пятки, который может ограничить выворот. Во время нагрузочной реакции вальгусное отклонение в голеностопном суставе увеличивает пронацию стопы, и активность задней большеберцовой мышцы требуется для того, чтобы контролировать вальгусную осевую нагрузку в направлении пронации. Примерно на 25 % опорной фазы (середина опоры) стопа снова начинает делать супинацию и возвращается в нейтральное положение к концу середины опоры. Пронация стопы в нагруженном положении (замкнутая кинематическая цепь) оказывает медиальное ротационное усилие на большую берцовую кость, а супинация создает латеральное ротационное усилие, действующее на большую берцовую кость. Точно так же, как положение стопы может вызывать ротацию большой берцовой кости, ротация большой берцовой кости может изменять положение стопы. Медиальная ротация большой берцовой кости в замкнутой кинематической цепи, при нагруженной стопе, вызывает пронацию, а латеральная ротация влечет за собой супинацию. Задняя большеберцовая, камбаловидная и икроножная мышцы сокращаются эксцентрически, контролируя пронацию стопы, которая происходит после постановки пятки, а также внутреннюю ротацию большой берцовой кости. В конце нагрузочной реакции и далее, вплоть до окончания опорной фазы (середина опоры, конечная стадия опоры, предперенос), стопа выполняет супинацию. При отрыве пятки от опоры стопа образует жесткий рычаг и играет роль блока для внешних мышц. В стадии предпереноса вес приходится на пальцы. В середине опорной фазы требования к поперечной устойчивости несколько ослабляются, поскольку уменьшается вальгусное отклонение. Мышца, напрягающая широкую фасцию, активность которой возникает в стадии нагрузочной реакции, продолжает стабилизировать таз в стадии середины опоры и окончания опоры. Активность средней ягодичной мышцы в середине опоры уменьшается, а в предпереносе (с момента касания опоры противоположной ногой) ее активность не прослеживается вообще. Приводящие мышцы бедра начинают эксцентрически действовать в стадии окончания опоры, и во время предпереноса они ограничивают латеральное смещение веса на противоположную ногу. В коленном суставе активность динамических стабилизаторов (полусухожильная, тонкая и широкая мышца бедра) прекращается в середине опоры, когда уменьшается вальгусное отклонение. Во время последней части опорной фазы вес смещается обратно на противоположную ногу, и приводящие мышцы бедра и подошвенные сгибатели помогают контролировать этот перенос веса. Сводная информация поперечных ротаций таза, бедренной кости и большой берцовой кости во фронтальной плоскости представлена в табл. 10.1.
* Бедренная и большая берцовая кость поворачиваются в течение 10–20 % опорного периода и начинают латеральную ротацию в конце предпереноса. В начале переноса бедренная кость и большая берцовая кость снова начинают медиальную ротацию. Степень поперечной ротации во время ходьбы, равно как и точка, где она начинается, меняется в зависимости от скорости ходьбы. Кроме этого, характерны и индивидуальные отклонения.
Резюме
Деятельность мышц и суставов нижней конечности Опорная фаза Таблицы 10.2-10.5 и рис. 10.6-10.9 представляют собой обзор деятельности мышц и суставов одной ноги во время опорной фазы ходьбы. Таблицы включают в себя: положение сустава в градусах, результирующий ВСРО, тип момента мышечного действия и мышечную активность (определенную по ЭМГ). Читателю следует понимать, что хотя положения суставов и действия мышц представляют средние значения по нормальной популяции, эти величины находятся под значительным влиянием скорости ходьбы и могут быть различными у разных исследователей. Dujardin показал, что имеются значительные индивидуальные отличия в сгибании/разгибании бедра, которые могут варьировать от 20 до 42°.
Рис. 10.6. Стадии ходьбы от постановки пятки (начальный контакт) до опоры на полную стопу (конец нагрузочной реакции). Вектора силы реакции опоры (ВСРО) показаны прямыми стрелками. Дуговые стрелки, направленные по часовой стрелке, показывают моменты сгибания, а направленные против часовой стрелки — моменты разгибания. Отметим, что ВСРО меняется от положения спереди от оси колена (при постановке пятки) до положения позади этой оси, при опоре на всю стопу
Рис. 10.7. Стадии ходьбы от постановки на полную стопу (конец нагрузочной реакции) до середины опоры (конца середины опоры)
Рис. 10.8. Период цикла ходьбы от середины опоры (конца середины опоры) до отрыва пятки от опоры (перед стадией окончания опоры)
Рис. 10.9. Стадии ходьбы от отрыва пятки от опоры (окончание опорного периода) до отрыва пальцев (конец предпереноса)
Oberg обнаружил, что АД тазобедренного сустава у женщин при медленной ходьбе варьирует от 41 до 52,5° при быстрой ходьбе. У мужчин вариации этого же показателя составили 44 и 53,6° соответственно. Borghese с коллегами определили, что паттерн изменений (по времени) углов сгибания и разгибания тазобедренного, коленного и голеностопного суставов является переменной, характерной для каждого человека, и что переменные эти изменяются при разной скорости ходьбы. Исследование моментов, действующих на уровне нижней конечности, во время опорной фазы, показывает, что в большей части фазы алгебраическая сумма всех моментов разгибания (положительных) и сгибания (отрицательных), действующих на тазобедренный, коленный и голеностопный суставы, оказывается положительной, т. е. суммарный момент оказывается моментом разгибания. Winter называет эту количественную оценку общей синергии конечности — моментом опоры, и он считает, что разгибающий момент опоры сохраняется при любой скорости ходьбы как у здоровых людей, так и у людей с нарушениями. Моменты тазобедренного и коленного суставов могут иметь существенные индивидуальные различия, но в итоге суммарный момент все равно будет моментом разгибания. Момент разгибания удерживает ногу от коллапса во время опорной фазы. Если происходит избыточное сгибание тазобедренного, коленного или голеностопного сустава, в другом будет генерироваться больший момент разгибания, поэтому суммарным моментом останется момент разгибания, а конечность будет защищена от коллапса. В конце опорной фазы момент опоры меняется от разгибающего к сгибающему (55–60 % от цикла ходьбы), и этот момент сгибания продолжается до начала переноса. Момент сгибания дает подъем ноги, перенос веса и пронос пальцев над опорой. В конце переноса вновь возникает суммарный момент разгибания, который, предположительно, способствует выравниванию ноги перед постановкой пятки.
Фаза переноса В табл. 10.6, 10.7 и на рис. 10.10, 10.11 представлены данные о деятельности мышц и суставов во время фазы переноса. В фазе переноса основными функциями маховой ноги являются: поддержание определенного положения суставов, ускорение и замедление маховой ноги, сохранение расстояния между подошвой/пальцами и опорой (клиренс) и подготовка к постановке пятки на опору.
Рис. 10.10. Стадии цикла от ускорения (начальный перенос) до середины переноса (середина переноса)
Рис. 10.11. Стадии цикла ходьбы от середины переноса (середина переноса) до окончания замедления (окончание переноса)
В голеностопном суставе передняя большеберцовая мышца, длинный разгибатель пальцев стопы и длинный разгибатель большого пальца стопы сокращаются концентрически, чтобы перевести стопу из положения подошвенного сгибания при отрыве пальцев в нейтральное положение в момент середины переноса. Затем эти мышцы сокращаются изометрически, поддерживая голеностопный сустав в нейтральной позиции в течение всей фазы переноса. После отрыва пальцев колено продолжает сгибаться и достигает максимального угла сгибания в 60° в конце начальной стадии переноса. В стадии середины переноса колено согнуто примерно на 30°, а в конце переноса полностью выпрямлено. Активность четырехглавой мышцы бедра, которая начинается как эксцентрическое сокращение в стадии предпереноса, контролирующее сгибание коленного сустава, изменяется по достижении максимального сгибания на короткое концентрическое сокращение, которое запускает ускорение голени вперед. Затем количество движения тянет голень вперед. В стадии окончания переноса, мышцы задней поверхности бедра сокращаются эксцентрически и контролируют движение ноги вперед. В самом конце фазы (окончание переноса) разгибатели колена сокращаются и удерживают колено в состоянии разгибания, подготавливая ногу к постановке пятки. Тазобедренный сустав идет от нейтрального положения при отрыве пальцев до 20° сгибания в начале переноса. К концу середины переноса сгибание достигает 30°, и это состояние сохраняется до конца фазы. Сгибатели бедра, активно контролировавшие разгибание бедра при отрыве пальцев, сокращаются концентрически, инициируя перенос. Сгибатели во время середины переноса и окончания переноса неактивны. Однако могут работать широкая и длинная приводящие мышцы, удерживая бедро в состоянии сгибания. Эта активность является дополнительной по отношению к их основной функции, удержанию ноги близко к срединной линии. Во время окончания переноса, мышцы задней поверхности бедра сокращаются эксцентрически и контролируют продвижение ноги вперед. Стратегия движений, используемая здоровыми людьми в противодействии моментам, показывает значительные индивидуальные различия, причем различия эти могут наблюдаться даже у одного и того же человека в нескольких фазах ходьбы. Эта вариабельность наблюдается, даже, несмотря на то, что кинематика ходьбы и общая синергия конечностей (моменты опоры) кажутся аналогичными. Разнообразие используемых двигательных паттернов говорит о том, что периферическая обратная связь от рецепторов суставов находится под сильным влиянием входящей информации от зрительной системы, которая сообщает о препятствиях на пути и, соответственно, воздействует на мышечную активность. Тот факт, что активность сгибателей бедра и тыльных сгибателей голеностопного сустава имеет при соответствующем движении опережающий характер, может указывать на существование системы опережающего контроля, основанной на потоке входных сигналов от зрительной системы.
Глава 11 КИНЕМАТИКА И КИНЕТИКА ТУЛОВИЩА И ВЕРХНИХ КОНЕЧНОСТЕЙ
Туловище. При ходьбе с обычной скоростью по ровной поверхности туловище всегда остается в выпрямленном положении. Однако Krebs с сотрудниками показали, что пик сгибания с низкой амплитудой встречается практически при каждой постановке пятки, а низкоамплитудный пик разгибания почти всегда наблюдается во время опоры на одну ногу. Количество поперечной ротации туловища при ходьбе невелико, и происходит она преимущественно в направлении противоположном направлению ротации таза (рис. 11.1).Рис. 11.1. Ротация туловища при обычной ходьбе невелика, а направление ее противоположно направлению ротации таза. Правая сторона таза поворачивается в заднем направлении, а правая сторона туловища идет вперед
Когда таз поворачивается вперед вместе с движением маховой ноги, ротация грудной клетки вперед наблюдается на противоположной стороне. На самом деле паттерн ротации грудной клетки является двухфазным, и реверс следует непосредственно после подъема опорной ноги. В двухопорной стадии грудная клетка поворачивается назад, а затем, в одноопорной стадии, медленно поворачивается вперед. Такое движение туловища помогает предотвратить излишние движения тела и уравновесить ротацию таза. Krebs с сотрудниками показали, что при свободной ходьбе поперечная ротация достигала максимум 9° в 10 % цикла, после каждой постановки пятки. В исследовании на тредмилле Stokes обнаружил, что движения и взаимодействия туловища и таза были предельно сложными. Он рассматривал поступательные и ротационные движения туловища вместе с передними и задними наклонами таза, латеральными наклонами таза и ротацией. Медиальные/ латеральные поступательные движения туловища выглядят, как покачивания из стороны в сторону относительно таза. Иначе говоря, туловище начинает качаться вправо от постановки правой пятки и до отрыва пальцев левой ноги, после чего начинается покачивание в обратном направлении, продолжающееся до отрыва пальцев правой ноги. Средняя амплитуда такого покачивания составляет примерно 5,4 см. Hirasaki с сотрудниками использовали тредмилл и нализ видеоряда для изучения движений туловища и головы при разных скоростях ходьбы. Они показали, что связь между скоростью ходьбы и движениями головы и туловища оказывается наиболее линейной при скоростях от 1,2 до 1,8 м/с. При более высоких, как и при более низких скоростях координация движений гораздо хуже. Хотя ЭМГ исследований мышц туловища при ходьбе было проведено довольно немного, было, тем не менее, показано, что мышцы, выпрямляющие позвоночник, имеют два периода активности. Первый всплеск активности происходит при постановке пятки, второй — при отрыве пальцев от опоры. Предположительно, мышцы, выпрямляющие позвоночник, удерживают туловище от падения вперед, связанного с моментом сгибания бедра, который совпадал с каждым всплеском их активности. Другие мышцы, в которых обнаруживали активность — квадратная мышца поясницы и прямые мышцы живота, хотя мнения многих исследователей по поводу деятельности этих мышц при ходьбе носят прямо противоположный характер. Верхние конечности. В то время как нижние конечности попеременно движутся вперед и назад, руки ритмично производят полукруговые махи. Движения ног, таза и рук имеют противоположное направление (например, правая нога идет вперед, правая рука — назад), но при этом движение руки совпадает с направлением движения туловища (рис. 11.2).
Рис. 11.2. Размахивание руками при ходьбе противоположно движениям ног. Правая рука движется вперед одновременно с движением правой ноги назад. Одновременно вперед идут правая рука и левая нога
Итак, правая рука движется вперед одновременно с движением вперед левой ноги, левая рука при этом делает мах назад. Такой характер махов руками помогает создать баланс при выносе ноги вперед и замедлить ротацию тела, которая инициируется поворачивающимся тазом. Общая АД в плече не слишком велика. При нормальных скоростях АД не превышает 30° (24° разгибания и 6° сгибания). Обычное движение плеча — это результат комбинированного действия силы тяжести и мышечной деятельности. Во время передней части маха рукой активны следующие медиальные ротаторы: подлопаточная мышца, большая круглая мышца и широчайшая мышца спины. При махе назад активны: средняя и задняя части дельтовидной мышцы — во время всей стадии маха, широчайшая мышца спины и большая круглая мышца — только в начальной стадии маха назад. Надостная, трапециевидная, а также задняя и средняя части дельтовидной мышцы активны как при махе назад, так и вперед. Интересно отметить, что практически во всех работах отмечалась очень низкая активность сгибателей плеча, или даже полное ее отсутствие. Во время маха вперед медиальные ротаторы сокращаются эксцентрически и контролируют внешнюю ротацию руки в плечевом суставе; задняя часть дельтовидной мышцы также сокращается эксцентрически и ограничивает амплитуду маха вперед. Широчайшая мышца спины и большая круглая мышца, как и задняя часть дельтовидной мышцы, могут затем действовать концентрически, осуществляя мах назад. Роль средней части дельтовидной мышцы пока неясна, хотя выдвигались предположения, что ее функцией является такое отведение руки, при котором во время маха рука не задевает туловище. Активность всех мышц возрастает при увеличении скорости ходьбы.
Глава 12 ХОДЬБА ПО ЛЕСТНИЦЕ И БЕГ
Ходьба по лестнице. Подъем и спуск по лестнице являются обычными видами локомоций, которые человеку приходится постоянно производить в повседневной жизни: при посещении магазинов, входе и выходе из общественного транспорта, или просто, если человек живет или работает в многоэтажном здании. Хотя в передвижениях по ровной почве и лестнице имеется масса схожих черт, у пациентов могут наблюдаться существенные различия в типах движений. Тот факт, что пациент обладает адекватной мышечной силой и АД суставов для ходьбы по ровной поверхности, вовсе не означает, что он сможет подниматься или спускаться по лестнице. Krebs с сотрудниками установили, что АД туловища при ходьбе по ровной поверхности была аналогична АД, наблюдаемой при спуске с лестницы, но отличалась во всех плоскостях от АД при подъеме по лестнице. Максимальная АД сгибания туловища при подъеме по лестнице как минимум вдвое превышала эти показатели, наблюдавшиеся при ходьбе по ровной поверхности или при спуске по лестнице. Движения при ходьбе по ровной поверхности и по лестнице схожи в том, что во всех случаях есть фаза опоры и фаза переноса и есть продвижение тела вперед за счет попеременных движений нижних конечностей. Как при ходьбе по лестнице, так и по ровной почве нижние конечности должны уравновешивать и перемещать ГРТ. McFayden и Winter использовали лестницу с высотой ступеньки в 22 см и шириной в 28 см для анализа ходьбы по лестнице в сагиттальной плоскости. Они получали кинетические и кинематические характеристики ходьбы одного исследуемого, выполнявшего 8 попыток. Цикл ходьбы при подъеме по лестнице, представленный на рис. 12.1, как раз основан на данных работы McFayden и Winter.Рис. 12.1. Подъем по лестнице
Исследователи разделили опорную фазу цикла ходьбы по лестнице на три подфазы, а фазу переноса — на две подфазы. Подразделы опорной фазы: прием веса (ПВ), тяга вверх (ТВ) и продолжение вперед (ПРВ). Подразделы фазы переноса: пронос стопы (ПРС) и постановка стопы (ПСС). Как видно из рис. 12.1, ПВ составляет примерно первые 14 % цикла, что вкакой-то степени сопоставимо с постановкой пятки и нагрузочной фазой при обычной ходьбе. Однако, в отличие от обычной ходьбы, точка начального контакта стопы при ходьбе по лестнице располагается на передней части стопы и затем, по мере смещения веса на опорную ногу, сдвигается кзади, к середине стопы. Стадия ТВ, которая продолжается приблизительно от 14 до 32 % цикла, является одноопорным периодом. Начальная часть ТВ — это период неустойчивости, поскольку весь вес тела переносится на опорную ногу, согнутую в тазобедренном, коленном и голеностопном суставах. Задачей во время этого периода является перенос веса тела на уровень следующей ступеньки. За генерацию большей части энергии, требуемой для выполнения тяги, отвечают разгибатели колена. Период ПРВ длится приблизительно от 32 до 64 % цикла и, грубо говоря, соответствует периоду от середины опоры до отрыва пальцев в обычной ходьбе. За генерацию основного количества энергии в этот период отвечают подошвенные сгибатели. Некоторые данные по АД сустава и мышечной деятельности при подъеме по лестнице, полученные McFayden и Winter, представлены в табл. 12.1, 12.2. Обзор таблиц показывает различия как в АД суставов, так и в мышечной деятельности при ходьбе по ровной поверхности и по лестнице.
ПРИМЕР 1. Из табл. 12.1 (2-я часть табл. 1: «Опорная фаза: конец тяги вверх») видно, что в начальной стадии подъема по лестнице требуется значительно большее сгибание тазобедренного и коленного сустава, чем при ходьбе по ровной поверхности. Таким образом, пациенту требуется большая АД для подъема по лестнице (при одинаковых размерах ступенек и крутизне лестницы), чем при ходьбе по горизонтальной поверхности. Естественно, при изменении размеров ступенек и других параметров лестницы данные будут сильно отличаться от полученных McFayden и Winter.* * * При подъеме по лестнице выполняется большое количество положительной работы, которая производится преимущественно концентрическим сокращением прямой мышцы бедра, широкой латеральной мышцы, камбаловидной мышцы и средней части икроножной мышцы. Моменты опоры при подъеме по лестнице, спуске с лестницы и ходьбе по ровной поверхности имеют аналогичные паттерны, однако величина моментов больше при ходьбе по лестнице, и, соответственно, требуется большая мышечная сила. Kirkwood показал, что максимальный пик момента внутренней приводящей мышцы возникает при спуске по лестнице и достигает 0,96 Nm/kg, по сравнению с 0,91 Nm/kg при ходьбе по ровной поверхности. Пик момента медиальной ротации бедра при спуске по лестнице также был больше, чем при обычной ходьбе. Однако эти же исследователи обнаружили, что моменты внутренних разгибателей, латеральной ротации и отведения бедра были такими же, как при «гладкой» ходьбе. Бег. Бег — это локомоторная деятельность, схожая с ходьбой, однако при этом необходимо отметить определенные различия. Как и в случае с ходьбой по лестнице, пациент, который может ходить по ровной поверхности, может оказаться совершенно неспособен бежать. Бег требует большего равновесия, мышечной силы и АД, чем обычная ходьба. Лучшее равновесие требуется, поскольку бег характерен не только значительным уменьшением ОБ, но и отсутствием периода двойной опоры, имеющегося в обычной ходьбе, а также наличием безопорного периода, при котором контакт стоп с опорной поверхностью отсутствует[3] (рис. 12.2).
Рис. 12.2. Цикл бегового шага
Цикл ходьбы, представленный на (рис. 12.3), также можно использовать для сравнения ходьбы и бега. Процент времени цикла, затрачиваемого на безопорные стадии, будет увеличиваться с возрастанием скорости бега. Мышцы должны вырабатывать больше энергии как для более высокого, чем при ходьбе, подъема ГРТ, так и для поддержания равновесия и опоры ГРТ в течение цикла.
Рис. 12.3. Цикл обычной ходьбы
Мышцы и суставы также должны быть способны к поглощению большего количества энергии и контролю веса ГРТ. Например, при обычной ходьбе величины СРО в ЦД при постановке пятки составляют примерно 70–80 % от веса тела и редко превышают в течение цикла 120 % от веса тела. При этом, во время бега СРО в ЦД достигает 200 % от веса тела, а в течение цикла может увеличиваться до 250 %. Более того, когда стопа ставится на почву, колено сгибается до 20°. Такая степень сгибания помогает смягчить ударные силы и увеличивает силу, действующую в надколенно-бедренном суставе. ОП при беге значительно меньше, чем при ходьбе. При ходьбе ОБ составляет 5,08–10,16 см, тогда как при беге стопы обычно ставятся на одну линию, так что ЦТ тела должен проецироваться только на опорную стопу. Для компенсации уменьшения ОБ увеличивается функциональный варусный угол конечности. Функциональный варусный угол конечности — это угол между половиной длины ноги и опорой. По мнению Mcpoil и сотрудников, функциональный варусный угол конечности увеличивается во время бега на 5° по сравнению с ходьбой, и вызывает при беге большую степень пронации, чем при ходьбе.
Движение суставов и мышечная деятельность Движение суставов. Амплитуда движения (АД) варьирует соответственно скорости бега, кроме того, отличаются данные, предоставленные разными исследователями. В начале опорной фазы, при постановке пятки бедро находится в сгибании примерно на 45°, в течение всего остального времени опорной фазы бедро разгибается, и сразу после отрыва пальцев его гиперразгибание составляет около 20°. Затем бедро сгибается и достигает в поздней фазе переноса сгибания в 55–60°, непосредственно перед окончанием переноса бедро слегка разгибается до 45–50° для подготовки к постановке пятки. Колено при постановке пятки сгибается примерно до 20–40° и продолжает во время нагрузочной реакции сгибаться до 60°. Затем колено продолжает разгибаться, достигая 40° сгибания перед отрывом пятки. Во время фазы переноса и начала стадии полета колено сгибается, достигая максимума в 125–130° в середине фазы переноса. В конце переноса колено разгибается до 40° и готовится к постановке пятки. Голеностопный сустав при постановке пятки находится в положении около 10° тыльного сгибания и далее быстро выполняет тыльное сгибание, достигая 25–30°. За быстрым тыльным сгибанием сразу же следует подошвенное сгибание, которое продолжается до конца опорной фазы и сохраняется в начале фазы переноса. Подошвенное сгибание достигает максимума в 25° за первые несколько секунд фазы переноса[4]. В течение остатка фазы переноса голеностопный сустав выполняет тыльное сгибание, достигая 10° в конце фазы и готовясь к постановке пятки. Эталонная конечность начинает медиальную ротацию во время фазы переноса. При постановке пятки нога продолжает ротацию, стопа выполняет пронацию. Латеральная ротация опорной ноги и супинация стопы начинаются, когда маховая нога проходит мимо опорной ноги в середине опоры. Амплитуда движения нижних конечностей, необходимая для бега, по сравнению с АД, требуемой для обычной ходьбы, представлены в табл.12.3. Наибольшие различия АД наблюдаются для коленного и тазобедренного суставов. Для бега в коленном суставе требуется дополнительно 90° сгибания. Тазобедренный сустав требует амплитуды практически вдвое большей, чем при обычной ходьбе.
Мышечная деятельность. Большая и средняя ягодичные мышцы активны как в начале опорной фазы, так и в конце фазы переноса. Мышца, натягивающая широкую фасцию, также активна в начале опоры и в конце переноса, но он сохраняет активность между ранней стадией переноса и его серединой. Большая приводящая мышца активна примерно в течение 25 % цикла, от окончания опоры до раннего периода фазы переноса. Активность подвздошно-поясничной мышцы наблюдается примерно в том же интервале цикла, что и длинной приводящей мышцы, но активность подвздошно-поясничной мышцы наблюдается также в фазе переноса от 35 до 60 % цикла. Четырехглавая мышца бедра действует эксцентрически во время первых 10 % опорной фазы, контролируя сгибание колена при его быстром сгибании. Она прекращает активность после первой части опорной фазы, активности также не наблюдается в последние 20 % фазы переноса, после чего начинается концентрическая активность на разгибание колена (до 40о сгибания) при подготовке к постановке пятки. Средняя часть мышц задней поверхности бедра активна в начале опоры и в течение большей части переноса. Например, средняя часть мышц задней поверхности бедра активна от 18 до 28 % фазы опоры, от 40 до 58 % начала переноса и в последние 20 % переноса. Когда колено сгибается, тазобедренный сустав разгибается, и мышцы задней поверхности в колене действуют, по всей видимости, концентрически, чтобы создать сгибание колена, достигающее максимума в середине переноса. В конце переноса мышцы задней поверхности могут сокращаться эксцентрически, контролируя разгибание колена и повторно разгибая бедро. Сравнение мышечной активности в голеностопном суставе при ходьбе и беге показывает, что при ходьбе активность икроножной мышцы начинается сразу после нагрузочной реакции примерно на 15 % цикла и продолжается примерно до 50 % цикла (сразу перед отрывом пальцев). Во время бега активность икроножной мышцы начинается при постановке пятки и продолжается в течение первых 15 % цикла, заканчиваясь там, где при ходьбе только начинается. Икроножная мышца вновь становится активной в последние 15 % переноса. Активность передней большеберцовой мышцы наблюдается как в фазе опоры, так и переноса и при ходьбе, и при беге. Однако общий период активности этой мышцы при ходьбе (54 % времени цикла) меньше, чем при беге (около 73 %). Такое различие связано, частично, с разной длиной фазы переноса при ходьбе и беге. При ходьбе фаза переноса занимает примерно 40 % от общего времени цикла, а при беге — порядка 62 %. Активность передней большеберцовой мышцы, как при ходьбе, так и при беге, носит преимущественно концентрический или изометрический характер, который необходим для создания адекватного клиренса стопы в фазе переноса. Различная активность передней большеберцовой мышцы при ходьбе и беге объясняется, по крайней мере, частично, более длинной фазой переноса во время бега. Ее активность в первой половине опорной фазы объясняет остальные различия в активности мышцы.
Резюме
В результате усилий, приложенных многими учеными, наше современное знание человеческих локомоций довольно обширно. Однако ходьба — это очень сложный предмет, и необходимы дальнейшие исследования для стандартизации методов измерения и определения кинематических и кинетических переменных, разработки недорогих и надежных методов анализа ходьбы в клинических условиях и обогащения довольно небольшой пока базы знаний о кинематических и кинетических характеристиках ходьбы детей и пожилых людей. Стандартизация оборудования и методов, используемых для количественной оценки переменных ходьбы, равно, как и стандартизация терминов, используемых для их описания, могла бы помочь снять некоторые имеющиеся в настоящее время в литературе противоречия и дать возможность сравнивать результаты разных исследователей с достаточной степенью точности. В настоящее время недорогие и надежные методы количественной оценки ограничены переменными времени и расстояния, такими, как длина полушага, длительность полушага, длина полного шага, темп и скорость. Эти измерения дают простые средства объективной оценки состояния пациента. Увеличение длины полушага и уменьшение его длительности можно использовать для документирования продвижения пациента к более нормальному паттерну ходьбы; вместе с тем нормальный паттерн ходьбы может быть неприемлемым для многих пациентов. Наоборот, целью лечения может быть подбор такого паттерна, который будет наиболее удобен при конкретном заболевании пациента. Успехи в технологии анализа ходьбы существенно улучшили наше знание ходьбы. Программы автоматического анализа ходьбы могут дать клиницисту информацию обо всех кинематических и кинетических параметрах, относящихся к конкретному испытуемому или пациенту. Однако исследователь или клиницист должен не только обладать достаточным знанием кинематики и кинетики нормальной ходьбы, но и уметь интерпретировать и использовать данные систем компьютерного анализа ходьбы для блага пациента.
Глава 13 АНАЛИЗ ХОДЬБЫ: ОТКЛОНЕНИЯ ОТ НОРМЫ. ОПРЕДЕЛЕНИЕ ПРИЧИН
Анализ ходьбы — это особый вид анализа движений в общем, целью которого является распознавание отклонений от нормы и нахождение их причин. Наиболее частыми причинами, влияющие на ходьбу, стали следующие: возраст, пол, вспомогательные устройства, заболевания, мышечная слабость и паралич, асимметрия нижних конечностей, травмы и нарушения параллельности.13.1. Возраст
Ходьба взрослых людей была предметом многочисленных исследований, однако ходьбе детей такого внимания не уделялось. Довольно малое количество проведенных исследований детской ходьбы показало, что возраст, когда ребенок начинает ходить без посторонней помощи, имеет очень сильные индивидуальные различия, и что такая вариабельность сохраняется во всех стадиях развития. Cioni и сотрудники показали, что у 25 доношенных детей возраст начала самостоятельной ходьбы (способность сделать 10 последовательных шагов без поддержки) варьировал от 12,6 до 16,6 месяцев. В первой стадии самостоятельной ходьбы ни один из 25 детей не осуществлял четкой постановки пятки, реципропных махов руками или ротации туловища. Однако через 4 месяца после начала самостоятельной ходьбы 11 из 25 детей выполняли постановку пятки и 16 из 25 производили реципропные махи руками и ротацию туловища. Центр тяжести ребенка, начавшего ходить, выше, чем у взрослого. Он, если сравнивать его ходьбу с походкой взрослого, ходит с более широкой ОБ, у него меньше время одноопорной фазы, короче длина полушага, меньше скорость и более высокий темп. Исследование детей в возрасте 3–5 лет показало, что некоторые связи между этими переменными были аналогичны связям, наблюдаемым у взрослых. Например, в группе дети 3–5 лет показывали значительные увеличения длины шага, отрегулированного по длине ноги, длине полушага и темпа, от медленного до свободного, и от свободного до быстрого. При этом 5-летние дети отличались от 3-летних тем, что у них была меньшая вариабельность длины шага, подстроенной под рост, при медленных и свободных скоростях. В исследовании детей от 6 до 13 лет Foley и сотрудники показали, что АД сгибания и разгибания суставов нижних конечностей были почти идентичны значениям, наблюдаемым у взрослых. Однако линейные перемещения, скорости и ускорения у детей были значительно больше. Темп, длина шага, время шага и иные пространственно-временные переменные показывали существенную вариабельность до достижения возраста 7–8 лет. Паттерн ходьбы, близкий к взрослому, начинают демонстрировать дети в возрасте 8-10 лет. Sutherland, проведший исследование 186 детей в возрасте от 1 года до 7 лет, предположил, что в качестве индикаторов зрелости ходьбы можно использовать следующие пять параметров: 1) продолжительность одноопорной фазы; 2) скорость ходьбы; 3) темп; 4) длина полушага; 5) отношение хода таза к отклонению голеностопного сустава (показатель ОБ). Увеличение всех параметров, за исключением темпа, является показателем зрелости ходьбы. В исследовании Sutherland продолжительность одноопорной фазы увеличивалась от 32 % у детей в возрасте 1 года до 38 % у детей 7 лет (среднее значение у взрослых равно 39 %). Также устойчиво увеличивалась скорость ходьбы, а темп с возрастом уменьшался. Beck обнаружил, что пространственно-временные характеристики и показатели СРО зависят от скорости ходьбы и возраста ребенка. Увеличение роста и взросление были основными факторами изменений пространственно-временных характеристик с возрастом. Средняя длина полного шага равнялась 76 % от роста ребенка при скорости 1,04 м/с, причем этот показатель не зависел от возраста ребенка. По данным Beck, взрослый паттерн СРО возникает по достижении 5-летнего возраста. Исследования на маленьких детях проводить достаточно затруднительно. Они часто осложняются тем, что детская скелетно-мышечная и нервная системы находятся на разных стадиях развития. Однако Sutherland постарался дать специалистам рекомендации по оценке детской ходьбы, разработав группу должных величин по кинематическим кривым движения при нормальной ходьбе. Тестирование должных величин показало, что при их помощи можно распознавать с высокой достоверностью аномальную походку и, соответственно, что ими можно пользоваться при начальном скрининге для распознавания функциональной недостаточности нижних конечностей у детей. Если в исследованиях походки маленьких детей наблюдается очевидный дефицит, то работы, посвященные эффектам старения, были и остаются темой многих исследований. В определенной степени такой интерес к особенностям ходьбы пожилых людей продиктован значительным количеством переломов бедра и падений, наблюдаемых у людей преклонного возраста. Половина стариков, которые до перелома бедра могли самостоятельно передвигаться, после этой травмы не только не могла ходить, но и в принципе оказывалась практически недееспособной. Более того, установлено, что пожилые люди падают при ходьбе, по меньшей мере, два раза в год. Таким образом, многие исследования направлены на определение структуры нормальной ходьбы пожилых людей, а также на выяснение следующего вопроса: являются ли причиной падений функциональная двигательная недостаточность, либо это проблемы контроля, или же в основе лежат другие виды недостаточности, сопровождающие нормальное старение. Lee и Kerrigan обнаружили значительные различия кинетических параметров, между группой регулярно падающих пожилых людей и контрольной группой того же возраста. Параметры крутящего момента, включающие в себя сгибание и риведение бедра, разгибание колена, тыльное сгибание в голеностопном суставе и инверсию, были выше в группе падающих, однако значительных отличий в выработке энергии обнаружено не было. Отсутствие различий в выработке энергии привело исследователей к заключению, что падающие люди могли использовать совместное сокращение мышц в попытке повысить устойчивость. Авторы предположили, что стратегии вмешательства и профилактики должны быть сосредоточены на двигательной активности, которая улучшала бы контроль движений и равновесия, такой, к примеру, как модифицированная гимнастика тай-цзи-цюань. Kaya и сотрудники показали, что здоровые пожилые люди в возрасте от 67 до 90 лет стараются ограничить генерацию инерции за счет снижения скорости ходьбы. Авторы считают, что пожилым людям может не хватать силы или контроля равновесия, чтобы надежно гасить ту инерцию, которая возникает при увеличении скорости ходьбы. Пожилые люди с нарушениями равновесия обладают избыточной боковой, линейной и угловой инерцией и ходят медленнее, чем их здоровые сверстники. Использование исследователями разных возрастных групп и уровня активности (групп людей, ведущих сидячую и активную жизнь) сделало затруднительным окончательное заключение в отношении эффектов нормального старения. Некоторые ученые обнаружили, что при сравнении с людьми молодого возраста, у пожилых людей наблюдается уменьшение естественной скорости ходьбы, укорочение шага и полушага, более длительный период двойной опоры и меньшее соотношение фаз переноса и опоры. Hinmann с сотрудниками показали, что в период от 19 до 62 лет каждые 10 лет наблюдается снижение скорости ходьбы на 2,5 % у мужчин и на 4,5 % у женщин. После 62 лет замедление скорости ходьбы имеет еще более выраженную прогрессию — 16 % для мужчин и 12 % для женщин. Winter и сотрудники сравнивали здоровых, физически подготовленных пожилых людей с молодыми взрослыми, испытуемыми и обнаружили, что различий в темпе естественной ходьбы между группами не было, но длина шага у пожилых оказалась достоверно короче, а период двойной опоры — длиннее. Blanke и Hageman сравнивали 12 мужчин в возрасте от 20 до 32 лет с 12 мужчинами в возрасте 60–74 лет и не обнаружили возрастных эффектов в отношении длины полушага, длины шага, скорости, вертикальных и горизонтальных колебаний ЦТ тела. Однако использовать их результаты в качестве аргумента довольно сложно по причине использования авторами очень малых групп. Kerrigan с соавторами показали, что скорость комфортабельной ходьбы и длина шага у пожилых были значительно ниже, чем у молодых людей. Эти же авторы обнаружили, что у пожилых людей снижена выработка энергии подошвенного сгибания, АД подошвенного сгибания, АД максимального разгибания бедра, и увеличен передний наклон таза. Авторы предположили, что легкие контрактуры тазобедренного сустава и слабость концентрического подошвенного сгибания могут быть причинами изменений суставов в пожилом возрасте. Judge и соавт. также обнаружили, что сила подошвенного сгибания и АД в поздней стадии опорной фазы были у пожилых людей (средний возраст 79 лет) ниже, чем у молодых (средний возраст 26 лет). Компенсация слабости подошвенного сгибания у пожилых людей происходила за счет усиления сгибания бедра. Сила голеностопного сустава ассоциировалась с генерацией усилия подошвенного сгибания в конце опорной фазы, и сила в голеностопном суставе оказалась самым сильным прогнозирующим параметром длины полушага, поскольку объясняла 52 % вариаций этого параметра. Mueller и соавт. обнаружили взаимосвязь между пиковым крутящим моментом подошвенного сгибания и тыльным сгибанием в голеностопном суставе. Авторы выдвинули предположение, что скорость ходьбы и длину полушага можно улучшить, увеличив пиковый крутящий момент подошвенного сгибания и АД тыльного сгибания. Bohannon с коллегами обнаружили, что сила сгибателей бедра была одной из переменных, по которой можно прогнозировать скорость ходьбы. Силу подошвенных сгибателей авторы не исследовали. Lord с сотр. давали программу упражнений женщинам в возрасте 60 лет и старше. По ее завершении авторы обнаружили существенное увеличение ритма и длины шага, равно как и уменьшение времени опорной фазы, времени переноса и продолжительности опоры. Connolly и Vander-woort измеряли воздействие растренированности (включавший в себя ослабление четырехглавой мышцы бедра) на ходьбу у группы пожилых людей (средний возраст 82,8 года). Показатели силы, измеренные через год после тренировочной программы, уменьшились на 68,3 %, а скорость ходьбы с произвольно выбранным темпом — на 19,5 %. Ходьба считается критерием независимости, и чем быстрее человек ходит, тем, как считают, большей степенью самостоятельности он обладает. Скорость ходьбы выше обычной часто требуется при переходе улицы. Ходьба в сочетании с упражнениями важна для предотвращения деструкции шейки бедра. Несмотря на то, что существуют разные мнения относительно скорости ходьбы пожилых людей, все соглашаются с тем, что в целом выбираемая пожилыми людьми скорость свободного хода медленнее, чем у молодых людей. Однако как уже говорилось раньше, медленная ходьба требует большего расхода энергии. Некоторые исследователи описывали изменения длины шага и скорости ходьбы в пожилом возрасте. Эти изменения могут представлять собой попытки сделать походку более устойчивой. Падения в пожилом возрасте — дело распространенное, и многие старики ведут относительно малоподвижную жизнь. Сидячий образ жизни может приводить к некоторой атрофии мышц, в связи с их недогрузкой, и такие люди чувствуют себя при ходьбе еще менее уверенно. Кроме того, существует вероятность, что некоторые изменения походки, которые приписывают процессу старения, могут, на самом деле, быть связаны скорее всего с состоянием здоровья и физическим состоянием, чем с возрастом человека.
13.2. Пол
Исследования, относящиеся к половым различиям в ходьбе, обременены теми же проблемами, что и исследования возрастных различий. Различия в методологиях, технологиях и подборе испытуемых затрудняют возможность прийти ко многим выводам в отношении половых различий при ходьбе. Когда отличия в росте, весе и длине ног между группами разных полов учитываются, половые различия оказываются не слишком выраженными. Oberg с сотрудниками обнаружили достоверные различия у мужчин и женщин в сгибании/разгибании колена при медленной, нормальной и быстрой ходьбе во время середины опоры и переноса. Они обнаружили, что при увеличении скорости ходьбы существенно увеличиваются суставные углы. Например, угол колена в середине опоры увеличивался с 15 до 24° у мужчин и от 12 до 20° у женщин. Однако авторы проводили наблюдения только за коленным и тазобедренным суставами. В другом исследовании те же авторы оценивали скорость, длину шага и частоту полушагов. Скорость ходьбы у женщин оказалась ниже, чем у мужчин (118–134 см/с у мужчин и 110-29 см/с у женщин), к тому же у женщин была короче длина полушага. Kerrigan с коллегами, обнаружили, что во время начала ходьбы сгибание бедра и разгибание колена у женщин достоверно больше. Женщины также показывали значительно больший момент сгибания колена и большее поглощение механической энергии в коленном суставе в стадии предпереноса. Кинетические данные были выровнены по росту и весу. Эти авторы показали также, что длина шага по отношению к росту у женщин больше, и что темп ходьбы у них выше, чем у мужчин.
13.3. Вспомогательные устройства
Ходьба без использования вспомогательных устройств (костыли, трость, ходунок) является идеальной ситуацией. Однако такие устройства часто оказываются необходимы либо после перелома нижней конечности, когда выздоравливающая кость неспособна выдерживать полный вес тела, либо когда такие устройства оказываются постоянным дополнением для поддержания равновесия при заболеваниях или параличе мышц. Трости обычно используются со стороны, противоположной поврежденной конечности и предназначены для уменьшения сил, воздействующих на поврежденное бедро. Однако существует очень мало прямых доказательств снижения давления, чтобы можно было подтвердить правильность этого утверждения. Krebs и соавт. смогли проверить влияние использования трости на уменьшение давления, использовав оснащенный измерительной аппаратурой протез головки бедра, дававший количественную информацию о контактных давлениях на вертлужный хрящ. В головке протеза находились 13 датчиков давления, срабатывающих при изменении давления на 0,00028 мм/МПа. Величина контактного давления при использовании трости снижалась, по данным с одного передатчика, на 29 и 40 %, по данным другого передатчика. Снижение давления в тазобедренном суставе совпадало с уменьшением амплитуды ЭМГ. Все эксперименты сравнивались с попытками ходьбы без трости. Авторы пришли к заключению, что использование трости с противоположной стороны явно помогает увеличить ОБ и уменьшить мышечные усилия и СРО, действующие на поврежденный тазобедренный сустав. Уменьшалась сила отводящей мышцы, и активность большой ягодичной мышцы снижалась примерно на 45 %. При ходьбе с использованием трости максимальная СРО наблюдалась между постановкой пятки и серединой опоры. Crosbie сравнивал два типа ходьбы с использованием ходунка. При первом варианте ходьбы исследуемый поднимал ходунок перед выносом поврежденной ноги вперед. При такой ходьбе бедро с поврежденной стороны оставалось в сгибании в течение всего цикла, предрасполагая, таким образом, тазобедренный сустав к дегенеративным изменениям и повышая шансы возникновения контрактуры. При втором варианте ходьбы человек поднимал ходунок и выносил его вперед одновременно с поврежденной ногой. При втором типе ходьбы, наблюдалось меньшее сгибание тазобедренного сустава, и тем самым уменьшалась вероятность неблагоприятных воздействий на сустав.
13.4. Заболевания
Несмотря на то что количественные методы оценки с использованием параметров времени и расстояния старательно поддерживаются исследователями функций человека, качественные методы являются не менее полезными, и их следует использовать совместно с количественной оценкой. Индивидуальный паттерн ходьбы может отражать не только психическое или психологическое состояние, но и любые дефекты суставов или мышц нижних конечностей. Определенные заболевания, такие как болезнь Паркинсона, совершенно определенным образом отражаются на походке и легко распознаются подготовленным исследователем. Походка при паркинсонизме характеризуется увеличением ритма, укорочением шага, отсутствием постановки пятки и отрыва пальцев и уменьшением амплитуды махов руками. Мышечная ригидность, характерная для этого заболевания, мешает осуществлению нормальных реципропных паттернов движений. Другой вид походки, возникающий в результате неврологических нарушений, это атаксическая походка. Здесь в результате аномального функционирования мозжечка происходит нарушение нормальных механизмов контроля равновесия, и поэтому человек ходит с ненормально широкой ОБ. Более широкая ОБ создает большие отклонения ЦТ из стороны в сторону и соответствующие изменения других параметров ходьбы.
13.5. Мышечная слабость или паралич
Иногда изолированная слабость или паралич отдельной мышцы оказывается причиной характерной походки. Например, результатом одностороннего паралича средней ягодичной мышцы оказывается типичный паттерн ходьбы, который так и называется — «походка средней ягодичной мышцы». Характеристики такой походки можно проследить, рассмотрев функции средней ягодичной мышцы при нормальной ходьбе. В норме средняя ягодичная мышца стабилизирует бедро и таз, контролируя опускание таза во время одноопорной стадии, особенно в первой части опорной фазы. Если активность средней ягодичной мышцы со стороны опорной ноги отсутствует, происходит избыточное опускание таза и туловища со стороны маховой ноги, результатом чего является потеря равновесия. Чтобы предотвратить навал таза и туловища на безопорную ногу и удержать ГРТ на опорной ноге, человек компенсирует это боковым наклоном туловища со стороны опорной ноги. Движение туловищем позволяет человеку сохранить равновесие, удерживая ЦТ над ОБ и поднять маховую ногу достаточно высоко, чтобы не задевать опору. Движение туловища снижает действие силы тяжести, уменьшая тем самым потребность в сокращении мышц, отводящих бедро и сопутствующую компрессию, создаваемую отводящими мышцами бедра. Латеральное отклонение туловища как раз и характерно для «походки средней ягодичной мышцы». Использование вспомогательных устройств, таких как трость, со стороны, противоположной парализованной мышце, снижает потребность в латеральном наклоне туловища. Использование трости снижает потребности в энергии для «походки средней ягодичной мышцы», но увеличивает их при попытке реабилитации и переходе к нормальной ходьбе. Большая ягодичная мышца при нормальной ходьбе обеспечивает стабильность в сагиттальной плоскости и ограничивает продвижения вперед. Эта мышца помогает противодействовать моменту сгибания в тазобедренном суставе в ранней стадии опорной фазы и ограничивает движение вперед бедренной кости в конце переноса. При параличе большой ягодичной мышцы тело при постановке пятки приходится откидывать назад, чтобы оно не провалилось вперед из-за действия момента сгибания в тазобедренном суставе. Отклонение туловища назад характерно для «походки большой ягодичной мышцы» (рис. 13.1).
Рис. 13.1. Отклонение туловища назад используется для компенсации паралича большой ягодичной мышцы
Четырехглавая мышца при ходьбе требуется при начальном контакте и нагрузочной реакции, когда на колено действует момент сгибания. Паралич четырехглавой мышцы легко компенсируется, если у человека в норме разгибатели бедра и подошвенные сгибатели. Большая ягодичная мышца и камбаловидная мышца тянут, соответственно, бедренную и большеберцовую кости назад, результатом чего является разгибание колена. Дополнительная компенсация осуществляется обычно наклоном туловища вперед и быстрым подошвенным сгибанием после начального контакта. Смещение веса вперед создает момент разгибания в колене (при начальном контакте и в периоде нагрузочной реакции). Оно также приводит колено в гиперразгибание и снимает потребность в активности четырехглавой мышцы. При одновременном параличе четырехглавой и большой ягодичной мышцы компенсация может происходить за счет подталкивания бедра кзади рукой во время начального контакта. Рука поддерживает туловище, предотвращает сгибание бедра и создает разгибание колена. Паралич подошвенных сгибателей (икроножная мышца, камбаловидная мышца, длинный сгибатель пальцев стопы, задняя большеберцовая мышца, подошвенная мышца и длинный сгибатель большого пальца стопы) вызывает так называемую «пяточную» походку. Этот паттерн характерен большим, чем в норме, тыльным сгибанием голеностопного сустава и разгибанием колена в опорной фазе, а также меньшей длиной полушага с пораженной стороны. Аномальное сгибание колена и тот факт, что камбаловидная мышца не тянет колено в разгибание, требует слишком большой активности четырехглавой мышцы для стабилизации колена в опорной фазе. Одноопорный период укорачивается по причине трудностей в стабилизации большеберцовой кости и колена. Длина полушага меньше нормы, поскольку отсутствует нормальный сегмент отталкивания. Нормальный отрыв пятки и переход к отрыву пальцев заменяются довольно резким подъемом всей стопы. Асимметричность такого вида походки становится очевидной при наблюдении и сравнении длин полушага правой и левой ногой.
13.6. Асимметрии нижних конечностей
Асимметрии нижних конечностей могут быть вызваны параличом мышц, контрактурами мягких тканей вокруг суставов, анкилозом костей, аномалиями развития и многими другими причинами. Любая из этих причин, как поодиночке, так и в комбинации, могут вызывать относительное или реальное укорочение одной конечности по сравнению с другой. Например, контрактура коленного сгибания вызывает укорочение пораженной конечности. Когда эта конечность находится под нагрузкой, здоровая конечность оказывается слишком длинной для нормального переноса. Соответственно, необходимым становится выравнивание длины ног, чтобы маховую ногу можно было переносить над опорой, не задевая ее. Явное укорочение слишком длинной здоровой конечности может производиться многими способами. Одним из них является более сильное, чем требуется обычно, сгибание в тазобедренном суставе, колене и голеностопном суставе. Другими способами относительного укорочения маховой ноги являются: подъем бедра (рис. 13.2) или перенос ноги по дуге (рис. 13.3). Каждая из таких компенсаций дает возможность ходить, но существенно увеличивает энергетические требования.
Рис. 13.2. Подброс правого бедра в фазе переноса правой ноги существенно укорачивает конечность
Рис. 13.3. Перенос правой ноги по дуге служит средством укорочения правой маховой ноги, особенно, если невозможно согнуть колено
Кроме укорочения нормальной конечности для выравнивания длины ног, человек может компенсировать разницу, используя другие части тела для удлинения короткой конечности. Подошвенное сгибание стопы в опорной фазе удлиняет опорную ногу, так как увеличивает количество ротации таза или его наклон при переносе. Последствия потери мышц или нарушения АД можно определить, используя модель, представленную в ч. II («Постурология: поза, осанка»). * * *
ПРИМЕР 1. Паралич тыльных сгибателей. Нормальной функцией тыльных сгибателей при ходьбе является: 1) поддерживать голеностопный сустав в нейтральном положении, чтобы начальный контакт с опорой производился пяткой; 2) контролировать момент подошвенного сгибания при постановке пятки; 3) выполнять тыльное сгибание в начале переноса; 4) поддерживать голеностопный сустав в положении тыльного сгибания в середине переноса и его окончании. Если эти функции отсутствуют, то можно ожидать следующее: 1) при начальном контакте на опору ставятся пальцы или вся стопа; 2) вход в фазу нагрузочной реакции будет резким; 3) потребуется увеличение сгибания в тазобедренном суставе и колене, чтобы осуществить пронос стопы над опорой в начале переноса; 4) для обеспечения клиренса придется находить способ либо укорочения маховой ноги, либо удлинения опорной конечности (табл. 13. 1).
* * * Тело человека замечательно своей способностью компенсировать утрату или нарушение функции. Большинство компенсаций делается бессознательно, и если нарушение незначительно, как это бывает, например, при избыточной пронации, человек может даже не подозревать, что у него несколько необычная походка. Однако любая компенсация обычно влечет за собой увеличение расхода энергии, и в результате может возникать перегрузка других структур тела. Kaufman с сотр. провели исследование для оценки того, какая степень асимметрии ног вызывает аномалии походки. В общей выборки часто встречаются мелкие неравномерности конечностей, однако большинство из них не требует какого-нибудь особенного лечения или вмешательства, поскольку особого влияния на нормальную походку они не оказывают. Авторы пришли к заключению, что разница в длине конечностей в 2,0 см (3,7 %) служит причиной асимметричной походки и потенциально может вызвать изменения суставного хряща. Song с коллегами обследовал неврологически здоровых детей с различиями в длине конечностей от 0,8 до 15,8 % (0,6-11 см). Отмечены следующие стратегии компенсации: выравнивание положения голеностопного сустава и стопы укороченной ноги (ходьба на пальцах), подпрыгивание на длинной ноге, увеличенное сгибание длинной ноги и перенос длинной ноги по дуге. Дети, использовавшие стратегию ходьбы на пальцах, при ходьбе показывали большее, по сравнению с контрольной группой, вертикальное смещение ЦТ тела.
13.7. Травмы и нарушения параллельности
Во время бега нагрузки больше, чем при ходьбе, соответственно, увеличивается и вероятность травмы. При обзоре записей о 1650 бегунах в промежутке между 1978 и 1980 гг. было выявлено 1819 травм. Наиболее часто повреждаемой зоной оказалось колено, а наиболее частой жалобой — боль в надколенно-бедренном суставе. Сопутствующими причинами при надколенно-бедренном синдроме были увеличение угла Q, скручивание большеберцовой кости и пронация стопы. Другой травмой у бегунов является туннельный синдром подвздошно-большеберцового нерва и воспаление подколенного сухожилия. Воспаление подошвенной фасции, вызванное повторными растяжениями между местом ее начала в подошвенным кольце пяточной кости и местом прикрепления к головкам плюсневых костей, является распространенным синдромом перегрузки, наблюдаемым у молодых спортсменов. Паттерны нормальной походки могут изменяться вследствие структурных изменений в тазобедренном, коленном и голеностопном суставах. В тазобедренном суставе на походку влияют разворот тазобедренного сустава наружу, внутрь, ретроверзия или антеверзия. В коленном суставе аномальные нагрузки при ходьбе, которые еще больше усиливаются при беге, связаны с разворотом сустава наружу, внутрь, рекурвацией и надколенником. Разворот тазобедренного сустава (coxa valga) может вызывать изменения в колене, такие как genu varum и проблемы с голеностопным суставом, такие как избыточная инверсия. При coxa valga аномальная вестовая нагрузка приходится на верхнюю медиальную часть головки бедренной кости. Аномальная компрессионная перегрузка возникает в медиальной части коленного сустава при genu varum. При избыточной инверсии аномальная весовая нагрузка наблюдается по латеральной границе стопы. По кинематической цепочке эти изменения вызывают аномалии в походке. Coxa vara может приводить к изменениям в коленном и голеностопном суставах, т. е. к genu valgum и избыточному вывороту стопы. В этом случае аномальная весовая нагрузка приходится на верхнюю латеральную часть головки бедра и в головке, и шейке бедренной кости могут возникать избыточные силы срезания. Кроме того, при genu valgum аномальные нагрузки натяжения могут возникать в медиальных структурах колена, а при вывороте стопы — в ее медиальных частях. При genu valgum ширина ОБ значительно больше, чем при нормальной ходьбе. В случае антеверзии тазобедренный сустав может приводить к повороту пальцев вовнутрь при ходьбе, поскольку в этом случае возникает аномальная медиальная ротация бедренной кости. И наоборот, при ретроверзии может возникать разворот пальцев наружу, поскольку аномальная ротация бедра происходит в латеральном направлении. В голеностопном суставе результатом чрезмерных нагрузок на стопу является хирургический артродез, при котором происходит сращение блока таранной кости с выемкой. Когда подошвенные сгибатели, являющиеся основными генераторами механической энергии при ходьбе, поражены, то мышцам в других суставах приходится вырабатывать больше энергии, чем при нормальной ходьбе. Например, Winter обнаружил, что люди с ампутированными ниже колена ногами используют большие ягодичные мышцы, полусухожильные мышцы и разгибатели колена в качестве генераторов энергии, чтобы компенсировать потерю подошвенных сгибателей. Olney с коллегами показали, что у детей с односторонним параличом подошвенных сгибателей работающие подошвенные сгибатели дают только 33 % генерации энергии, по сравнению с 66 %, наблюдаемыми при нормальной ходьбе. Компенсация потерянных подошвенных сгибателей происходила у этих детей за счет повышенной активности сгибателей бедра. В стопе плоской и полой вызывают изменение веса и могут быть причинами аномальных нагрузок на бедро или колено. При pes cavus вес приходится преимущественно на задний отдел стопы, а метадорзальный регион и середина стопы обеспечивают минимальную опору. При беге на метадорзальные кости приходится непропорционально малая доля веса. При pes planus вес приходится,в основном на среднюю часть стопы, а не распределяется между задней частью стопы, латеральной частью середины стопы, метадорзальными костями и пальцами, как в нормальной стопе. Соответственно, возникают серьезные нарушения в движущей фазе ходьбы. Нарушения нормального паттерна ходьбы вызывают увеличение энергозатрат, так как нормальные способы трансформации потенциальной энергии в кинетическую нарушены. Усиление мышечной активности при компенсации нарушений ведет к увеличению потребления кислорода. При сравнении пациентов с коксартрозом и с контрактурой лодыжки, потребление кислорода у пациентов с коксартрозом было на 32 % больше, чем у здоровых людей и пациентов с контрактурой лодыжки. Боль также может быть фактором, ведущим к увеличению потребления кислорода. При усилении боли увеличивается и потребление кислорода. Пациенты с двусторонним параличом нижних конечностей обычно используют при ходьбе длинные подпорки или костыли. При такой ходьбе всю работу по перемещению тела выполняют верхние конечности и туловище, и затраты энергии на ходьбу существенно превышают норму. В настоящее время для активации парализованных нижних конечностей используется вид электрической стимуляции, называемый функциональной нервно-мышечной стимуляцией (ФНМС), при которой мышцы смогли бы вырабатывать достаточно энергии для ходьбы. Однако энергетические затраты при ходьбе с ФНМС все равно выше, чем при нормальной ходьбе.
Резюме
Цель анализа ходьбы — распознать отклонения от нормы и определить их причины. Если причина установлена, можно предпринимать коррекционные действия, направленные на снятие или минимизацию аномальных нагрузок и снижение расходов энергии. Иногда такие коррекционные меры могут быть очень простыми, например, использование дополнительной стельки в обуви для выравнивания длины ног, или разработка программы упражнений для повышения гибкости тазобедренного, коленного и голеностопного суставов. В других случаях коррекция может требовать использования вспомогательных устройств, таких как ходунки, трости или костыли. Однако понимание сложности аномальной походки, умение распознать аномальные паттерны и определить причины отклонений, должно быть основано на знании нормальной структуры и функции. Изучение походки человека, как и его позы и осанки, показывает взаимную зависимость структуры и функции, а также большую изменчивость вариантов ходьбы и позы, характерную для человека.
Контрольные вопросы
1. Какова доля опорной фазы в цикле нормальной ходьбы? Как увеличение скорости ходьбы влияет на процентное соотношение времени, приходящегося на опорную фазу? 2. Какая доля в цикле ходьбы приходится на стадию двойной опоры? Какое влияние на стадию двойной опоры оказывает увеличение или уменьшение скорости ходьбы? 3. Во время какой стадии цикла ходьбы наблюдается максимальное сгибание колена? 4. Какова общая АД, необходимая для нормальной ходьбы, в коленном, тазобедренном и голеностопном суставах? 5. Как отличается общая АД в коленном, тазобедренном и голеностопном суставах, требуемая для нормальной ходьбы, при сравнении ее с АД, необходимой для бега и ходьбы по лестнице? 6. Какие детерминанты ходьбы помогают минимизировать вертикальный подъем ЦТ тела? 7. Какая детерминанта помогает минимизировать снижение ЦТ тела? 8. Какая детерминанта помогает минимизировать боковые отклонения ЦТ тела? 9. В чем роль задней большеберцовой мышцы при ходьбе? 10. Как маховые движения верхних конечностей при ходьбе связаны с движениями туловища, таза и нижних конечностей? 11. Как используется традиционная терминология описания ходьбы по сравнению с терминологией ДД? Расскажите о сходствах и различиях терминов. 12. Опишите подразделы опорной фазы и фазы переноса в цикле ходьбы, используя традиционную терминологию. 13. Опишите подразделы опорной фазы и фазы переноса в цикле ходьбы, используя терминологию ДД. 14. Какова функция подошвенных сгибателей при ходьбе? 15. Расскажите о поперечных ротациях во фронтальной плоскости в тазе, бедренной кости и большой берцовой кости при ходьбе. 16. Когда стопа начинает супинацию при нормальной ходьбе? 17. Каковы функции тыльных сгибателей при нормальной ходьбе? 18. Сравните мышечную активность при ходьбе и беге. 19. Куда проецируется ВСРО при начальном контакте относительно голеностопного сустава, колена и тазобедренного сустава? Какие типы моментов действуют при начальном контакте в голеностопном, коленном и тазобедренном суставах? Ответьте на этот же вопрос, используя разные подразделы, т. е. нагрузочную реакцию, середину опоры, конечную стадию опоры и предперенос. 20. Объясните, что такое вальгусное отклонение. Укажите, где оно происходит в цикле ходьбы, покажите мышцы, помогающие его контролировать. 21. Расскажите, что происходит при ходьбе в случае паралича подошвенных сгибателей. Каких компенсаций можно ожидать в этом случае?
IV. СТРУКТУРА И ФУНКЦИЯ СУСТАВА
Задачи
После изучения этой главы читатель должен уметь: Назвать 1. Элементарные принципы строения сустава. 2. Пять признаков, общих для всех диартроидальных суставов. 3. Два основных типа суставов. 4. Общий состав соединительной ткани. 5. Свойства и функции материалов, используемых в суставах человека. 6. Определения артрокинематики и остеокинематики.Определить 1. Ось движения для любого заданного движения в отдельном суставе (коленном, тазобедренном, плюсно-фаланговом). 2. Плоскость движения для любого заданного движения в отдельном суставе (плечевом, межфаланговом, лучезапястном). 3. Степень свободы для данного сустава. 4. Отличительные признаки диартроидального сустава. 5. Структуры, способствующие устойчивости сустава.
Сравнить, при помощи примеров 1. Синартроз с диартрозом, на основе метода построения, материалов и функции. 2. Закрытую кинематическую цепь с открытой кинематической цепью. 3. Жестко упакованное положение сустава с положением свободной упаковки. 4. Давление и натяжение с нагрузкой и деформацией. 5. Движение выпуклой поверхности по вогнутой поверхности с движением вогнутой поверхности по выпуклой поверхности. 6. Теории смазки суставов. 7. Деформацию (проскальзывание) и гистерезис. 8. Состав следующих структур: сухожилий и связок, костей и хрящей.
Изобразить графически 1. Типичную кривую нагрузки-деформации для связки и проводить идентификацию различных регионов кривой. 2. Типичную кривую давления-растяжения («стресс-стрейн») для связки или сухожилия.
Введение
В предыдущей части говорилось о биомеханике ходьбы, был проведен анализ ходьбы: выявлены отклонения от нормы и определены их причины. В данном разделе речь пойдет о структуре и функции сустава. Для начала необходимо дать общее понятие об архитектуре и строении сустава. Суставы, находящиеся в скелете человека, похожи на те суставы, или шарниры, которые используются при постройке зданий, создании мебели и машин. Как человеческие, так и нечеловеческие суставы построены на одних и тех же базовых принципах; при этом для обоих типов суставов прослеживаются сильные взаимосвязи между структурой и функцией. Можно сказать, что функция определяет структуру, а структура, в свою очередь, определяет функцию. Например, если надо спроектировать шарнир для предмета мебели или механизма, конструктор должен знать функцию сустава, чтобы создать соответствующий его дизайн. Таким образом, в этом случае структура определяется функцией. Однако если сустав спроектирован и создан, то его функция уже будет определяться структурой. Суставы в теле человека являются как бы заранее спроектированными и собранными, поэтому функция человеческого сустава будет всегда определяться его структурой. Однако читателю следует помнить, что ткани человека могут адаптироваться к стрессу, и, таким образом, здесь уже структура, в некоторой степени, будет определяться функцией. Например, когда нарушается функция поврежденного сустава, целый сустав в качестве ответной реакции может также изменить и свою структуру, и функцию. Хотя основным предметом внимания данной части являются суставы человека, мы выбрали соединение стола в качестве примера для иллюстрации основных принципов строения и архитектуры сустава. Принцип действия шарнира ножки стола легко осмыслить, и он достаточно хорошо иллюстрирует основные принципы конструкции сустава. Суставные движения — это простые движения двух биозвеньев относительно друг друга в одном суставе, направленные на решение простой двигательной задачи. Движения в суставах ограничены суставными сумками, связками, сухожилиями, мышцами и происходят по дугам окружностей вокруг суставных осей. Поэтому в каждом суставе количество простых двигательных задач, решаемых суставными движениями, зависит от количества степеней свободы движений. В одноосных суставах (межфаланговые) с одной степенью свободы происходит сгибание и разгибании; в двуосных (лучезапястный, локтевой, голеностопный, коленный) с двумя степенями свободы возможны сгибание и разгибание, отведение и приведение, пронация и супинация; в трехосных суставах (плечевой, тазобедренный) с тремя степенями свободы решаются задачи сгибания и разгибания, отведения и приведения, пронации и супинации или исполнения круговых движений. Основные принципы. Сустав (сочленение) используется для соединения одного компонента структуры с другим, или несколькими другими компонентами. Строение сустава и используемые материалы частично зависят от функции сустава и характера составных частей. Если функцией сустава является обеспечение устойчивости или статическая опора, его строение будет отличаться от сустава, желательной функцией которого будет подвижность. Таким образом, функция, по крайней мере, частично будет определять структуру. Если человек хочет спроектировать сочленение, которое находится между ножками стола и его крышкой, ему следует учитывать функцию этого сочленения и характер компонентов. Функцией шарнира стола будет, конечно, устойчивость, и, таким образом, строение его должно быть таким, чтобы компоненты объединяли стол в устойчивую конструкцию. Если желательно, чтобы ножки стола складывались, то шарнир должен быть таким, чтобы в одной ситуации обеспечивать устойчивость, а в другой — подвижность. Проект стола со складными ножками и используемые материалы должны отличаться и быть более сложными, чем для обычного нескладного стола. Одним из возможных вариантов проекта складной ножки стола может быть применение металлического уголка с фиксатором. Когда фиксатор открыт, ножка двигается свободно, если закрыт — шарнир будет зафиксирован (см. рис.).Рисунок. Складная ножка стола: a — если фиксатор открыт, то шарнир создает подвижность, и ножка стола двигается свободно; b — если уголок зафиксирован, то он не дает двигаться ножке стола и таким образом обеспечивает устойчивость
Использование такой конструкции требует использования внешней силы для фиксирования и открытия. Однако такой шарнир на столе не обеспечивает устойчивости при движении, что зачастую делают суставы человека. Шарниры стола использовались исключительно для того, чтобы показать читателю элементарные принципы, которым должна следовать конструкция сустава, но следует при этом помнить, что человеческие суставы намного сложнее. • Суставы, которые выполняют только одну функцию, менее сложны, чем те, которые выполняют несколько функций. • Конструкция сустава определяется его функцией и характером компонентов. • Когда сустав построен, структура сустава и характер его компонентов будут определять функцию. Однако функция, которую исполняет сустав, может вызвать изменения в его структуре.
Глава 14 МАТЕРИАЛЫ, ИСПОЛЬЗУЕМЫЕ В СУСТАВАХ ЧЕЛОВЕКА
Тот факт, что материалы, используемые в человеческих суставах, состоят из живой ткани, делает суставы уникальными и трудно воспроизводимыми. Живая ткань способна менять свою структуру в ответ на изменения функциональных запросов или условий окружающей среды. Ей требуется питание, она подвержена болезням, травмам и старению. Таким образом, чтобы понимать строение и функции человеческих суставов, необходимо иметь некоторые представления о характере материалов, которые используются для построения сустава и сил, действующих на суставы.14.1. Строение соединительной ткани
Живая материя, используемая в построении человеческих суставов, — это соединительная ткань в форме костей, суставных сумок, капсул, хрящей, дисков, жировых прослоек, губ, менисков, пластинок и сухожилий (рис. 14.1).
Рис. 14.1. Форма соединительной ткани (заштрихованные области — определенные соединительные ткани): a — коллатеральные связки коленного сустава поддерживают срединные и латеральные части сустава; b — сухожилие соединяет мышцу с костью; c — межпозвоночные диски; d — мениски коленного сустава; e — фиброзно-хрящевые пластинки пястно-фаланговых суставов пальцев рук; f — губа суставной ямки увеличивает площадь поверхности плечевой ямки; g — коленная чашечка (крупнейшая сезамовидная кость организма) и жировая прослойка
Общее анатомическое строение и микроархитектура этих видов соединительной ткани весьма разнообразны, а биомеханические особенности поведения и состав капсул, хрящей, отдельных связок, менисков и сухожилий исследуются до сих пор. В целом, строение соединительной ткани характеризуется широким разбросом клеток (клеточный компонент) и наличием большой внеклеточной матрицы. На микроскопическом уровне внеклеточная матрица обладает как межволоконными (ранее их называли основной субстанцией), так и волоконными компонентами. Состав соединительной ткани в целом приводится в табл. 14.1.
Внеклеточная матрица Межфибриллярный компонент. Межволоконный компонент соединительной ткани состоит из гидратных сетей белков, прежде всего из протеогликанов и гликопротеинов. Протеогликаны (ПГ) состоят из белковой основы, к которой крепятся одна или несколько полисахаридных цепочек, называемых гликозаминогликанами (ГАГ). Основными типами цепочек сульфатированных ГАГ являются хондроитин-4 и хондроитин-6 сульфат, каратан сульфат, гепарансульфат и дерматансульфат. Гиалуронон (ГА), который состоит из очень длинной цепи несульфатированных дисахаридов, является нетипичным ГАГ, так как он не сульфатирован и не крепится к белковой основе. Компактный регион в конце белковой основы связывается с ГА при помощи гликопротеина, называемого связующим белком. Связующими белками соединены с ГА 27 типов сложных типов ПГ, таких как аггрекан и версикан. Аггрекан состоит из большого количества (около 100) цепочек хондроитинсульфата и меньшего количества цепочек кератан сульфата (около 30), которые и крепятся к белковой основе (рис. 14.2).
Рис. 14.2. Схематическое представление протеогликана (ПГ) аггрекана. Цепочки гликозаминогликанов (ГАГ) хондроитин сульфата и кератан сульфата показаны, как прикрепленные непосредственно к белковой основе (на диаграмме — горизонтальная линия).
Неаггрегирующие типы ПГ, такие, как декорин и бигликан, не связываются с ГА и имеют довольно небольшое количество цепочек ГАГ (табл. 14.2).
Таблица 14.2. ПРОТЕОГЛИКАНЫ И ГЛИКОПРОТЕИНЫ
Протеогликаны ∙ Состав и функция Агрегирующие типы ∙ Связаны с гиалуронаном. Связь стабилизируется за счет гликопротеинового связующего белка Аггрекан ∙ Состоит из большого количества (примерно 100) цепочек хондроитин сульфата и меньшего количества (около 30) цепочек кератан сульфата, прикрепленных к белковой основе Версикан ∙ Состоит из небольшого количества цепочек хондроитин сульфата Неагрегирующие типы ∙ Не связаны с гиалуронаном и обладают сравнительно небольшим количеством боковых цепочек ГАГ, по сравнению с хондроитин сульфатом и дерматан сульфатом Декорин ∙ Состоит только из одной цепочки ГАГ, прикрепленной к белковой основе. Связывает между собой коллагеновые фибриллы Бигликан ∙ Состоит из двух цепочек ГАГ. Играет роль в регуляции клеточной активности
Гликопротеины ∙ Состав и функция Фибронектин ∙ Эта большая молекула гликопротеина имеет зоны связи для коллагена и гепарина. Обеспечивает слипание коллагена в тканях эмбриона и облегчает пролиферацию ткани при заживлении ран Ламимин ∙ Эта большая молекула гликопротеина имеет зоны связи для гепарин сульфата и коллагена типа IV. Образует часть базальной пластинки Тенаскин ∙ Тенаскин связан с развитием суставного хряща, а также с остальными постоянными хрящами
Белковая основа крепится к гиалуронанону (на диаграмме — вертикальная линия) не напрямую, а посредством связующего белка От доли ПГ во внеклеточной матрице определенной структуры (кость, хрящ, сухожилие или связка) зависит ее гидратация. Цепочки ГАГ имеют отрицательный заряд, поэтому концентрация отрицательно заряженных ПГ создает давление набухания, вызывающее приток воды во внеклеточную матрицу. Приток воды вызывает давление натяжения в окружающей коллагеновой сети. Коллагеновые волокна сопротивляются набуханию, создавая тем самым жесткость внеклеточной матрицы и способность ее к сопротивлению компрессионным силам. Кроме своей функции связывания воды, ПГ и гликопротеины образуют поддерживающую субстанцию для волоконных и клеточных компонентов. ПГ образуют прикрепления к коллагеновым волокнам и способствуют их усилению. Ткани, которые подвержены высоким компрессионным нагрузкам, обладают богатым содержанием ПГ, тогда как ткани, больше работающие на растягивание, имеют меньшую его концентрацию. Такие гликопротеины, как фибронектин и ламинин играют важную роль во взаимодействии между смежными тканевыми клетками и в присоединении этих клеток к коллагену.
Фибриллярный компонент. Фибриллярный, или фиброзный, компонент внеклеточной матрицы состоит из двух основных классов структурных белков: коллагена и эластина. Коллаген в человеческом организме содержится в изобилии и у млекопитающих составляет до 30 % всего белка. Коллаген обладает пределом прочности на разрыв, близким к показателям стали. Он отвечает за функциональную целостность структур соединительной ткани. Идентифицировано от 15 до 19 (XV–XIX) типов коллагена, однако функции еще всех типов точно не определены. Типы коллагена и их распределение в суставных структурах приведены в табл. 14.3.
Таблица 14.3. ТИПЫ КОЛЛАГЕНА И ИХ РАСПРЕДЕЛЕНИЕ ПО СУСТАВНЫМ СТРУКТУРАМ
Тип ∙ Распределение I. Фибриллообразующий коллаген — наиболее широко распространен в теле ∙ Фиброзное кольцо межпозвоночного диска, кости, губы, связки, мениски, сухожилия и синовий II. Фибриллообразующий коллаген ∙ Фиброзное кольцо и студенистое ядро межпозвоночных дисков, гиалиновые суставные хрящи и мениски III. Фибриллообразующий коллаген, обычно присутствует вместе с типом ∙ Фиброзные суставные капсулы, связки, мениски и сухожилия IV. Коллаген, образующий ячеистую структуру, удерживающий клетки вместе ∙ У молодых взрослых людей — студенистое ядро и сухожилия V. Фибриллообразующий коллаген ∙ Гиалиновые суставные хрящи и сухожилия VI. Фибриллообразующий коллаген ∙ Гиалиновые суставные хрящи и межпозвоночные диски VII. Связующий, или контактный коллаген ∙ Кожа VIII. Коллаген, образующий ячеистую структуру ∙ Неизвестно IX. Коллаген, связанный с фибриллообразующими коллагенами. Облегчает взаимодействие фибрилл с протеогликанами и ковалентно связан с типом II в хрящах ∙ Фиброзное кольцо межпозвоночных дисков, гиалиновые суставные хрящи X. Коллаген, образующий ячеистую структуру ∙ Пластинки роста хряща и межпозвоночные диски с дегенеративными изменениями XI. Фибриллообразующий коллаген, регулирующий размер фибрилл ∙ Гиалиновые суставные хрящи XII. Коллаген, связанный с фибриллами ∙ Хрящи, связки и сухожилия XIII. Не классифицирован ∙ — XIV. Коллаген, связанный с фибриллами ∙ Сухожилия XV. Неизвестен ∙ —
Римские цифры, обозначающие каждый из типов коллагена, например, тип I, тип II, отражают то, в каком порядке их открывали. Наиболее распространенными являются фибрил-образующие коллагены (типы I, II, III, V и XI). Коллаген типа I обнаруживается почти во всех соединительных тканях, в том числе в сухожилиях, синовии, костях, губах и коже. Коллаген типа I — это основной тип коллагена, находящегося в связках, сухожилиях, менисках и фиброзных частях суставных капсул. Коллаген типа II является основным типом, находящимся в гиалиновых суставных хрящах. Также коллаген типа II находится в студенистом ядре в центре межпозвоночных дисков. Типы коллагена I, II и IX содержатся в фиброзном кольце межпозвоночных дисков. Коллаген типа III содержится в коже и в синовиальном слое суставных капсул. Основными строительными «кирпичиками» коллагена являются тройные спирали из трех полипептидных цепочек, которые называются молекулами тропоколлагена. Они синтезируются в грубой эндоплазматической сети фибробластов. Молекулы тропоколлагена притягиваются друг к другу и образуют микрофибриллы. Микрофибриллы образуют субфибриллы, из которых, в свою очередь, уже образуются фибриллы. Фибриллы образуют пучки, а сочетания пучков образуют волокна. Коллагеновые волокна могут быть организованы разными способами и могут значительно различаться по размеру и форме. Волокна коллагена не эластичны, однако их организация в некоторых структурах может давать некоторое количество деформации по эластическому типу. В расслабленном состоянии волокна коллагена принимают волнообразную конфигурацию, называемую «завитки». При натяжении завитки исчезают. Эластин (желтая фиброзная ткань), как видно из названия, обладает эластическими свойствами, которые позволяют эластиновым волокнам деформироваться под действием прилагаемой силы и возвращаться к исходной форме после прекращения действия этой силы. Эластиновые волокна обычно бывают желтоватого цвета и свободно разветвляются. Соотношение эластиновых и коллагеновых волокон в различных соединительных тканях может сильно варьировать, но обычно доля эластиновых волокон в фиброзном компоненте внеклеточной матрицы много меньше, чем содержание коллагеновых волокон. Эластиновые волокна в различных количествах содержатся во всех суставных структурах, а также в коже, трахеобронхиальном дереве и стенках артерий.
14.2. Специфические структуры соединительной ткани
14.2.1. Связки. Сухожилия Связки. Связки — это структуры соединительной ткани, которые соединяют или связывают одну кость с другой, либо в суставе, либо рядом с ним. Некоторые связки являются составными частями или входят в состав капсул. Их бывает трудно распознать, поскольку они тесно интегрированы в капсулу. Другие связки являются отдельными, легко узнаваемыми структурами, часто выглядящими как плотные белые ленты или шнуры из соединительной ткани. Одним заметным исключением является желтая связка, которая окрашена в отчетливый желтый цвет. Связки обычно называют в соответствии с их местонахождением, формой, прикреплением к костям и взаимоотношениями с другими связками. Иногда связкам присваивают имена тех людей, которые впервые их открыли. Передняя продольная связка, которая покрывает большинство передней поверхности позвоночника, служит примером того, как связку называют по расположению (передняя) и по форме (продольная). Медиальная и латеральная коллатеральные связки локтевого и коленного суставов расположены на медиальной и, соответственно, латеральной поверхности этих суставов и являются примерами связок, названных по их расположению. Такие связки, как клювовидно-плечевая связка, соединяющая клювовидный отросток лопатки с плечевой костью, и лучелоктевые связки, соединяющие лучевую и локтевую кости в дистальном лучелоктевом суставе, являются примерами названий по костным прикреплениям. Связка, названная по своей форме, — дельтовидная связка голеностопного сустава. Y-образная связка Бигелоу (Bigelow) в тазобедренном суставе, названа как по своей форме (перевернутая буква Y), так и по имени человека, ее открывшего. Крестообразные связки колена называются так, поскольку пересекают друг друга. Связки, как и другие соединительнотканные структуры, являются образованиями гетерогенными, состоящими из небольшого количества клеток (около 20 %) и крупной внеклеточной матрицы (от 80 до 90 %). Клеточный компонент представлен преимущественно фибробластами. Межфибрилльный компонент состоит из ПГ и гликопротеинов, причем наиболее распространенным ПГ является дерматан сульфат. По сравнению с суставным хрящом, содержание ПГ в связках относительно невелико, порядка 0,2 % сухого веса. Фибрилльный компонент внеклеточной матрицы, как связок, так и сухожилий, содержит больше коллагена, чем эластина. Вместе с тем относительная пропорция волокон коллаген/эластин в разных связках значительно отличается. Некоторые связки, такие как выйная связка и желтая связка, содержат больше эластиновых волокон, чем коллагеновых. Основным типом коллагена, содержащегося в связках, является коллаген типа I, в небольших количествах присутствуют также типы III и VI. Связки построены по типу плотной упаковки волокон коллагена типа I с небольшим количеством рассеянных между ними клеток. Промежуточное вещество связок состоит из пучков фиброзного вещества, разделенных пучками свободной соединительной ткани. Два типа пучков и их взаимное расположение дают возможность сдвига пучков относительно друг друга, что позволяет натягиваться частям связки при различных положениях сустава. По мере приближения к кости внешний вид клеток и архитектура матрицы меняются. Волокна коллагена во время роста и развития цементируются в кость, образуя волокна Шарпи (Sharpey) и зоны связочных прикреплений к кости (вход). Придание жесткости интерфейсу связка/кость уменьшает вероятность того, что связка не выдержит в месте входа, однако это же место является наиболее подверженным дегенеративным изменениям. Организация коллагеновых волокон и соотношение волокон коллаген/эластин в разных связках определяет способности этих структур к обеспечению устойчивости и подвижности конкретного сустава. В целом волокна коллагена в связках имеют различную организацию, которая позволяет связкам сопротивляться силам, действующим одновременно в разных направлениях. Сухожилия. Сухожилия соединяют мышцы с костями и обычно называются по мышце, к которой они прикрепляются, например, сухожилие двуглавой мышцы плеча, сухожилие трехглавой мышцы и т. д. Ахиллово сухожилие в голеностопном суставе названо по имени греческого героя Троянской войны, пораженного стрелой в пятку, единственное уязвимое место в его теле. Сухожилия, как и другие соединительнотканные структуры, состоят из небольшого клеточного компонента (преимущественно фибробластов) и крупной внеклеточной матрицы. Фибрилльный компонент представлен коллагеном и эластином в разных пропорциях. Межфибрилльный компонент внеклеточной матрицы содержит воду, смеси ПГ и ГАГ (преимущественно дерматан сульфат). Как и в связках, основным типом коллагена в сухожилиях является коллаген типа I и небольшие количества типов II, III, IV и V. Фибриллы коллагена состоят из сгруппированных вместе микрофибрилл; эти фибриллы группируются и образуют первичные пучки, т. е. волокна. Группы пучков волокон окружены оболочкой из свободной соединительной ткани и называются эндотендиний. Эндотендон, содержащий коллаген типов I и II, также содержит в себе нервы, лимфатические и кровеносные сосуды, питающие сухожилия. Эндотендиний образует вторичные пучки. Отдельные вторичные пучки связаны с дискретными группами мышечных волокон, или моторными единицами, в месте перехода мышцы в сухожилие. Оболочка, которая покрывает все вторичные пучки, называется эпитендиний. Перитендиний, или паратенон, представляет собой двухслойную оболочку ареолярной ткани, свободно крепящуюся к наружной поверхности эпитендиния. Перитендиний может превращаться в оболочку, наполненную синовиальной жидкостью, называемую тендосиновием (сухожильной оболочкой). Она встречается в сухожилиях лучезапястного сустава и ладони, которые подвергаются высокой степени трения. Паратенон защищает сухожилие и улучшает его движение по прилегающим структурам. Прикрепление сухожилия к кости характеризуется изменениями в его структуре, которые происходят по длине, равной примерно 1 мм. Соединительная ткань в костных концах сухожилия переходит сначала в неминерализованный фиброзный хрящ, затем — в минерализованный фиброзный хрящ, и потом — в кость. Между неминерализованной и минерализованной областями имеется разграничительная отметка. Прикрепление сухожилия к мышце (мышечно-сухожильный переход) образуется при сращении волокон коллагена с актиновыми нитями саркомеров мышц. В отличие от связок, коллагеновые волокна сухожилий имеют параллельную организацию, предназначенную для работы с однонаправленными силами растяжения.
14.2.2. Сумки. Хрящи Сумки. Сумки, которые по строению и функции аналогичны сухожильным оболочкам, представляют собой мешки из синовиальной мембраны, внутри которых находится синовиальная жидкость. Примерами сумок, расположенных между костью и кожей, служат сумки между коленной чашечкой и кожей, или между локтевым отростком локтевой кости и кожей. Такие сумки называются подкожными (рис. 14.3,а). Подсухожильные сумки находятся между сухожилием и костью. Подмышечные сумки — между мышцей и костью (рис. 14.3,b).
Рис. 14.3. Виды сумок и их функции: a — подкожная предчашечная сумка уменьшает трение между костью и покрывающей ее кожей. Подсухожильная глубокая подчашечная сумка уменьшает трение между сухожилием коленной чашечки и большой берцовой костью; b — подмышечная сумка уменьшает трение между икроножной мышцей и бедренной костью
Хрящи. Хрящи обычно делят на следующие типы: белый волокнистый хрящ, желтый эластический хрящ и гиалиновый суставной хрящ. Хрящи могут также отвердевать. Белый волокнистый хрящ образует связующий «цемент» в суставах, которые не позволяют выполнять значительных движений. Из этого же типа хряща образованы межпозвоночные диски, он находится также в гленоидальной и вертлужной губах. В отличие от других типов хрящей, белый волокнистый хрящ содержит в фиброзном компоненте внеклеточной матрицы коллаген типа I. Желтый эластичный волокнистый хрящ представлен в ушах и надгортаннике; он отличается от белого волокнистого хряща более высоким соотношением эластин/коллаген (белый хрящ состоит преимущественно из волокон коллагена). Гиалиновый суставной хрящ, который называют обычно просто суставным хрящом, образует от 2 до 7 мм оболочку на концах костей в большинстве суставов. Эти хрящевые поверхности способны нести и распределять вес в течение всей жизни человека. Однако при повреждении гиалинового хряща выясняется, что механизмы его восстановления несовершенны и весьма ограничены. У суставного хряща примерно такое же строение, как и у любой соединительной ткани, т. е. для него характерно наличие незначительного клеточного компонента и крупной внеклеточной матрицы. Однако состав, как клеточного компонента, так и внеклеточной матрицы, несколько отличается от имеющихся в связках и сухожилиях. Клеточный компонент хряща содержит преимущественно хондроциты и хондробласты. Хондроциты — это специализированные клетки, ответственные за развитие суставного хряща и сохранение внеклеточной матрицы. Эти клетки вырабатывают аггрекан, связующий белок и гиалуронан, которые выбрасываются во внеклеточную матрицу и спонтанно агрегируют. Фибрилльный компонент внеклеточной матрицы включает в себя эластин и коллаген типов II, VI, IX, X, XI и XII. От 90 до 95 % коллагена суставного хряща составляет коллаген типа II. Это единственный тип коллагена, способный блокировать отложение кристаллов гидроксипатита, которые требуются для кальцификации. Коллаген типа XI регулирует размер фибрилл, а тип IX облегчает их взаимодействие с молекулами протеогликанов. Коллаген рассеян повсюду в межфибрилльной составляющей, состоящей из ПГ, неколлагеновых ПГ и 65–80 % воды. Содержание ПГ в суставном хряще больше, чем в других суставных структурах, и большинство ПГ в нем представлено в форме аггреканов, которые связываются с гиалурононом и образуют крупные агрегаты ПГ. Аггрекан является основным ПГ в гиалиновом суставном хряще. Двумя основными типами ГАГ в суставных хрящах являются хондроитин сульфат и кератан сульфат. Соотношение «хондроитин/кератан» может у разных людей отличаться, оно может также зависеть от возраста и места проживания. Чем выше концентрация хондроитин сульфата, тем лучше ткань оказывает сопротивление компрессионным нагрузкам. Концентрация кератан сульфата увеличивается с возрастом, а также в суставах с артритными изменениями; уменьшается она при иммобилизации. Если доля кератан сульфата превышает долю хондроитин сульфата, нарушается способность сустава выдерживать нагрузки. Хрящевой гликопротеин хондронектин играет важную роль в слипании хондробластов в волокна коллагена типа II в присутствии хондроитин сульфата. На концах костных компонентов синовиальных суставов находятся три отдельных слоя, или зоны суставных хрящей (рис. 14.4).
Рис. 14.4. Строение гиалинового хряща
В самом наружном слое (зона I) волокна коллагена организованы параллельно поверхности. Гладкий наружный слой хряща помогает уменьшить трение между противоположными суставными поверхностями и распределить усилия. Во втором и третьем слоях они организованы в случайном порядке и образуют открытую сетку или решетку. Второй слой, с сетью свободно свернутых волокон, может деформироваться и помогает поглотить часть силы, действующей на суставные поверхности. В третьем слое (радиальный слой) некоторые волокна перпендикулярны поверхности и идут через интерфейс между незатвердевшим и затвердевшим хрящом, отыскивая безопасное место в затвердевшем хряще. Затвердевший слой хряща, который иногда называют четвертой зоной, является смежным с субхондральной костью и надежно крепит хрящ к кости. Граница раздела между незатвердевшим и затвердевшим хрящом иногда называется линией ординара. Эта зона очень важна, в силу ее непосредственной связи с ростом, старением, травмами и выздоровлением. В норме, замена затвердевшего слоя суставного хряща происходит при эндохондральном окостенении. Фронт отвердения медленно продвигается к не затвердевшей области хряща, и эта скорость находится в равновесии со скоростью поглощения затвердевшего хряща эндохондральным окостенением. С возрастом замена отвердевшего слоя хряща костью и последующее продвижение линии ординара приводят к утончению гиалинового суставного хряща. При травмах это может приводить к микротрещинам субхондральной кости и к возможной активации центра вторичного окостенения в кости, что приводит к росту новой кости. Этот процесс аналогичен наблюдаемому при старении. Рост кости распространяется в затвердевший слой, линия ординара сдвигается вперед, а незатвердевший слой становится тоньше. Во время движения сустава, или при сжимании хряща, часть его жидкого содержимого выходит через поры наружного слоя. После окончания движения или давления жидкость уходит обратно в хрящ. Скорость потока жидкости зависит от величины силы и продолжительности ее действия. Если действующая сила увеличивается и сохраняется в течение длительного времени, проницаемость хряща снижается, и, соответственно, уменьшается поток жидкости, как из хряща, так и в обратном направлении. Поскольку у взрослых людей хрящ лишен кровеносных сосудов и нервов, его питание обеспечивается исключительно за счет тока жидкости туда и обратно. Свободное движение жидкости необходимо для жизнеобеспечения хряща; кроме того, жидкость значительно уменьшает трение. Тот факт, что в гиалиновом хряще часто наблюдаются дегенеративные изменения после длительной иммобилизации, может быть связан с нарушением питания хряща. Эффекты иммобилизации, при которой компрессия суставных поверхностей уменьшена или отсутствует, аналогичны эффектам длительного воздействия больших компрессионных сил в том плане, что ток жидкости в хряще уменьшается, и, соответственно, ухудшается питание хряща.
14.2.3. Кость Кости являются самой твердой разновидностью соединительной ткани в организме. Как и другие формы соединительной ткани, кость состоит из клеточного компонента и внеклеточной матрицы, делящейся, в свою очередь, на межфибриллярный и фибриллярный компоненты. Однако кость отличается от других соединительных тканей составом всех трех компонентов, и ее, таким образом, следует рассматривать как отдельный вид соединительной ткани. Клеточные компоненты кости состоят из фибробластов, фиброцитов, остеобластов, остеоцитов, остеокластов и костных клеток-предшественников. Фибробласты и фиброциты необходимы для выработки коллагена. Остеобласты являются первичными образующими кость клетками, которые отвечают не только за синтез костной ткани, но также за ее запасы и минерализацию. Остеобласты, кроме того, выделяют коллаген в окружающую матрицу. Когда производительная деятельность остеобластов заканчивается, они превращаются в остеоциты. Остеокласты — это крупные полиморфные клетки с несколькими ядрами. Остеокласты отвечают за резорбцию кости. Межфибриллярный компонент внеклеточной матрицы кости, кроме ПГ, гликопротеинов и воды, содержит минеральные вещества. Минеральное содержимое, которое состоит преимущественно из кристаллов кальция и фосфата, расположенных внутри и между коллагеновыми фибриллами, называют еще неорганическим компонентом кости. Неорганический компонент кости помогает кости обрести ее твердую консистенцию и является основным отличием кости от других соединительных тканей. Фибриллярный компонент внеклеточной матрицы, кроме волокон коллагена (преимущественно типа I) и эластина, содержит ретикулярные волокна. Коллаген типа I, синтезируемый остеобластами, является единственной разновидностью коллагена, способной связывать минеральные вещества. Весьма твердая внеклеточная матрица в костях принимает разные формы: в самом внутреннем слое она называется губчатой или решетчатой костью, а во внешнем слое ее называют компактной костью. В губчатой кости затвердевшая ткань образует тонкие пластинки, называемые трабекулами. Трабекулы расположены так, чтобы они могли реагировать на нагрузку, оказываемую на кость. Они могут самостоятельно регулировать свое расположение так, чтобы не только поддерживать в рабочем состоянии стержень и другие части кости, но также и сохранять такую форму суставной поверхности, которая была бы способна к оптимальному распределению нагрузки. Так называемый «нагрузочный анамнез» трабекул, включающий в себя нагрузки с нескольких направлений, влияет на распределение плотности кости и ориентацию трабекул. Увеличение плотности кости в некоторых областях и уменьшение ее в других местах происходит как реакция на нагрузки, которым подвергается кость. Губчатая кость покрыта твердым слоем плотной компактной кости, которую называют корковой костью. Корковая кость, т. е. оболочка, уложена концентрическими слоями. Корковая кость, которая выглядит весьма твердой, покрыта грубой фиброзной мембраной, которая называется надкостницей. Внутренняя поверхность надкостницы состоит из остеобластов, которые необходимы для роста и восстановления кости. Надкостница имеет хорошую сосудистую сеть, состоящую из капилляров, обеспечивающих питание кости. В матрицу корковой кости часто входят терминальные коллагеновые волокна связок и сухожилий. Во всех синовиальных суставах надкостница на концах костей замещена гиалиновым суставным хрящом. На микроскопическом уровне можно увидеть два отдельных типа организации кости: перепончатая ретикулофиброзная кость и пластинчатая кость. В перепончатой (основной тип) кости волокна коллагена организованы беспорядочно, грубые волокна чередуются с тонкими волокнами таким образом, что это напоминает ткань или плетение. Перепончатая кость является молодой и может формироваться без поддержки или без лежащей в основе структуры. Пластинчатая кость, наоборот, требуется для образования каркаса, это более старая кость, которая составляет большую часть скелета взрослого человека. И корковая, и губчатая кость являются разновидностями пластинчатой кости, только в корковой кости волокна коллагена организованы слоями, в которые встроены остеоциты. Кость обладает способностью к реконструкциям, которые в норме происходят в течение всей жизни, когда кости приходится реагировать на такие внешние силы (или нагрузки), как тяга сухожилий или вес тела. На реконструкцию костей действуют также внутренние влияния: старение или различные метаболические или болезнетворные процессы. Повторное или длительное действие внешних сил (нагрузок) вызывает увеличение активности остеобластов и, в результате, ведет к увеличению костной массы. При отсутствии действия таких сил увеличивается активность остеокластов, и костная масса уменьшается. Если остеокласты распадаются или начинают поглощать кость с большей скоростью, чем остеобласты могут ее восстанавливать илиреконструировать, возникает состояние, известное под названием остеопороз. При остеопорозе снижается плотность костей (масса на единицу объема), по сравнению с нормальными значениями, и кости становятся слабее (более подверженными переломам), чем кости с нормальной плотностью. Кость считается композитным материалом, поскольку ее свойства являются сочетанием свойств различных компонентов, составляющих эту кость, при этом свойства каждого отдельного компонента сильно отличаются от свойств других компонентов. Кость отличается от хряща тем, что она получает питание от кровеносной сети, находящейся непосредственно в самой кости, тогда как к хрящу питание поступает от внешних источников. В предыдущих параграфах дан краткий обзор состава разных соединительных тканей, связанных с суставами. Состав костей, капсул, хрящей, межпозвоночных дисков, менисков, связок и сухожилий приведен в табл.14.4.
Глава 15 ОСНОВНЫЕ СВОЙСТВА СОЕДИНИТЕЛЬНОЙ ТКАНИ
Все структуры, обсуждавшиеся в предыдущей главе, можно рассматривать как гетерогенные в том плане, что они состоят из разных твердых и полужестких компонентов, включающих воду, коллаген и другие композитные материалы. Каждый из этих материалов имеет собственные свойства, и, таким образом, свойства структуры в целом являются сочетанием свойств различных компонентов и различных долей присутствия каждого из компонентов в структуре в целом. Гетерогенный характер соединительных тканей дает возможность тканям варьировать свое механическое поведение в соответствии с тем, какая сила воздействует на соединительнотканную структуру. Структуры с таким типом поведения называются анизотропными. * * *ПРИМЕР 1. В случае с длинной костью, представляющей собой гетерогенное композитное вещество, механическая реакция кости на постоянную силу, действующую вдоль кости (или ее части), будет отличаться от реакции на силу, действующую перпендикулярно костному стержню.* * * Анизотропные материалы отличаются от изотропных материалов тем, что изотропные материалы демонстрируют одинаковые свойства, независимо от того, в каком месте действует на них сила. Соединительные ткани также обладают способностью менять свои структуры и функции при реакциях как на внешнюю, так и внутреннюю силу. Например, соединительные ткани могут отвечать на внешние нагрузки изменением состава внеклеточной матрицы (содержание и тип ПГ). Такое адаптативное поведение иллюстрирует динамический характер соединительной ткани и указывает на сильную взаимосвязь между структурой и функцией.
15.1. Вязкоупругость, временные характеристики, свойства быстродействия
Вязкоупругость. Хотя соединительные ткани существуют в теле во многих видах, все они имеют одно общее свойство, называемое вязкоупругостью. Поведение вязкоупругих материалов представляет собой сочетание свойств упругости (эластичности) и вязкости. Упругость — это способность материала возвращаться к исходному состоянию после деформации (изменения размеров, например длины или формы), при условии прекращения деформирующего воздействия. Когда материал растягивают, совершается определенная работа, и его энергия увеличивается. Эластичный (упругий) материал запасает эту энергию и хранит ее таким образом, что может моментально вернуться к исходным размерам после прекращения действия силы растяжения. Термин «упругость» подразумевает, что изменение длины, или деформация, прямо пропорциональны прилагаемым силам или нагрузкам. Вязкость — это способность материала ослаблять действия сил смещения. Когда сила действует на вязкий материал, ткани показывают свои свойства, зависимые от времени и быстродействия. Временные характеристики: крип (ползучая деформация) и напряжение-расслабление. Вязкоупругие материалы способны подвергаться деформации под действием сил растяжения или сжатия и возвращаться к исходному состоянию после прекращения действия этих сил. Однако в нормальных условиях возвращение к исходному состоянию не происходит мгновенно. Вязкоупругие материалы, в отличие от чисто упругих, обладают определенными временными (зависимыми от времени) свойствами. Иными словами, вязкоупругие материалы чувствительны к продолжительности действия силы. Если вязкоупругий материал подвергается действию постоянной нагрузки растяжения или сжатия, он вначале реагирует быстрой деформацией, а затем продолжает деформироваться в течение всего времени действия нагрузки (это могут быть часы, дни и даже месяцы). Деформация ткани продолжается, пока не будет достигнуто состояние равновесия, и нагрузка уравновешивается. Этот феномен называется крип (ползучая деформация), и в различных материалах происходит за счет разных механизмов (рис. 15.1).
Рис. 15.1. Крип связки или сухожилия в ответ на постоянную нагрузку. Сухожилие или связка сначала быстро деформируется, что видно на участке кривой (a), а затем продолжает деформироваться медленнее (b)
В кости, на микроскопическом уровне, крип при сжимании связан с проскальзыванием пластинок в остеоны (гаверсова система) и током интерстициальной жидкости. В гиалиновых суставных хрящах, на которые действуют компрессионные силы, крип связан с постепенной потерей жидкости тканью. В связках и сухожилиях крип связан с движением длинных цепочек ГАГ в твердой матрице. В целом чем продолжительнее действие силы, тем больше деформация. Увеличение величины нагрузки ведет к увеличению скорости крипа. В некоторых тканях ускорение крипа наблюдается после довольно длительного времени. Изменения температуры также влияют на скорость крипа. Высокие температуры увеличивают его скорость, а низкие — уменьшают. Теоретически, если кто-то захочет растянуть структуру из соединительной ткани, ему нужно нагреть ее и применять большую нагрузку в течение длительного времени — это точно вызовет крип. Напряжение — расслабление происходит, когда вязкоупругий материал подвергается постоянной деформации. Вначале он реагирует быстрым начальным напряжением, которое со временем уменьшается, вплоть до достижения равновесия, т. е. момента, когда напряжение равно нулю. Свойства быстродействия. На разные скорости действия нагрузки вязкоупругие материалы реагируют по-разному. Если нагрузка подается быстро, они дают большее сопротивление деформации, чем в случае медленной нагрузки. В целом, чем выше скорость нагрузки и продолжительнее действие силы, тем больше деформация. Вязкоупругие материалы не запасают энергию, которая передается им при деформации, действующей силой, и, таким образом, такая энергия не может участвовать в восстановлении. Если сила действует, а затем прекращает действие, некоторое количество энергии, возникающей при растягивании или сжимании материала, может рассеиваться (теряться) в виде тепла и, таким образом, материал не может вернуться к исходным размерам. Потеря энергии (разница между потраченной и возвращенной энергией) называется гистерезисом. Гистерезис характерен для вязкоупругих материалов в случае воздействия и последующего прекращения нагрузки (рис. 15.2).
Рис. 15.2. Гистерезис (разница между затраченной и восстановленной энергией): a — типичная кривая, полученная при измерении упругости хряща. Стрелка (L) — цикл нагрузки, кривая — энергия, затраченная во время этого цикла. Стрелка (R) — цикл без нагрузки, кривая — восстановление энергии. Заштрихованная область — потеря энергии, или гистерезис. Расстояние между (L) и (R), обозначенное как (D), — деформация (изменение размеров); b — на этом рисунке, где представлен более упругий материал, количество затраченной энергии (L)равно количеству восстановленной энергии (R), и таким образом материал возвращается к исходным размерам сразу же после снятия нагрузки
15.2. Механическое поведение
Материалы, используемые при строительстве человеческих суставов, каждый день подвергаются воздействию постоянно меняющихся сил, и способность этих материалов выдерживать нагрузки и обеспечивать опору и защиту суставов, исключительно важна. Для того чтобы понимать, как различные материалы и структуры способны создавать опору (механическое поведение этих структур), читателю следует ознакомиться с понятиями и терминами, используемыми для описания такого поведения, например: напряжение, деформация, повреждение, жесткость (ригидность) и пр. Типы тестов, используемых для определения механического поведения строительных материалов тела человека, ничем не отличаются от тестов, используемых для обычных материалов, хотя вязкоупругие материалы могут реагировать по-разному.
15.2.1. Напряжение и усилие Термин «нагрузка» обычно используется для обозначения внешней силы, или сил, действующих на структуру. Многие из примеров внешних нагрузок уже приводились ранее, в ч. I, в том числе силы, действующие на стол со стороны лежащей на нем книги, силы, действующие на кисть и предплечье человека со стороны портфеля, который он несет, и силы, действующие на ногу со стороны привязанного к ней груза. Внешние силы, действующие со стороны книги, портфеля и груза, можно называть нагрузками. Когда такие нагрузки (силы) действуют на структуру или материал, то силы, возникающие в самой структуре, или материале, называются механическими напряжениями. Напряжение можно выразить математически при помощи следующей формулы: S = F/A, где S — стресс (напряжение); F — действующая сила; A — площадь приложения этой силы, т. е. напряжение равно силе, действующей на единицу площади объекта. В твердых или полутвердых материалах напряжение может сопровождаться изменением формы, длины или ширины структуры или материала, которое называется деформацией. Тип напряжения и деформации, которые развиваются в структурах человека, как мы уже говорили, зависит от характера материала, типа нагрузки, точки приложения нагрузки, направления и величины нагрузки, а также ее скорости и продолжительности. Если структура далее не может выдерживать такую нагрузку, то говорят о ее повреждении. Предельное напряжение — это напряжение в точке повреждения материала; предельная деформация — это деформация в точке повреждения. Если две внешних силы равны по величине и действуют по одной линии, но в разных направлениях, они представляют собой нагрузку разрыва или растяжения, создают напряжение растяжения (разрыва) и деформацию растяжения в структуре или материале (рис. 15.3,а).
Рис. 15.3. Деформации растяжения (увеличении длины) (а) и сжатия (уменьшение длины) (b) стержня
Напряжение растяжения = сила растяжения/площадь поперечного сечения (перпендикулярна направлению действующей силы). Когда действует нагрузка растяжения, можно говорить о напряжении, как об интенсивности силы, и о деформации, как о количестве удлинения и сужения структуры. Деформация определяется при сравнении исходных размеров (L0) предмета и их изменением под воздействием силы (рис. 15.3,а). Удлинение структуры, вызванное нагрузкой растяжения, сопровождается пропорциональным утончением материала (боковая деформация). Максимальное (нормальное или основное) напряжение растяжения действует в плоскости, перпендикулярной приложенной силе. Если две внешних силы равны и действуют по одной линии навстречу друг другу, с противоположных концов структуры, в структуре развивается напряжение сжатия (рис. 15.3,b). Напряжение сжатия = сила сжатия/площадь поперечного сечения (перпендикулярна направлению силы). Если действует нагрузка сжатия, напряжение можно рассматривать как меру интенсивности силы, а деформацию — как количество укорочения и расширения, происходящего в структуре. Максимальное компрессионное напряжение наблюдается в плоскости, перпендикулярной нагрузке. Укорочение структуры сопровождается пропорциональным количеством расширения (боковая деформация). Деформация сжатия = уменьшение длины (AL)/исходная длина (L). При возникновении моментов сгибания в такой структуре, как длинная кость, в ней создаются и напряжения, и деформации, как сжатия, так и растяжения. Напряжение и деформация растяжения развиваются на выпуклой стороне, а напряжение и деформация сжатия — на вогнутой стороне продольной оси кости (рис. 15.4).
Рис. 15.4. Напряжение и деформация в длинной кости. Стрелки, идущие друг от друга на выпуклой стороне кости — напряжение и деформация растяжения. Стрелки, указывающие друг на друга на вогнутой стороне, — напряжение и деформация сжатия структуры
Если две внешних силы равны, параллельны и действуют в противоположном направлении, но не находятся на одной линии, они создают нагрузку смещения (срезания), которая вызывает напряжение смещения и деформацию структуры (рис. 15.5).
Рис. 15.5. Напряжение и деформация сдвига
Напряжение смещения = сила смещения/площадь поперечного сечения (параллельна направлению действующей силы)[5].
15.2.2. Кривые «нагрузка-деформация» и «напряжение-деформация» Кривые «нагрузка-деформация» и «напряжение-деформация» используются для определения прочности строительных материалов, в том числе и тех, из которых построено тело человека: костей, связок, сухожилий, суставных капсул и других структур, которые составляют и укрепляют суставы. Кривая «нагрузка-деформация», на которой нагрузка (внешняя сила) сравнивается с деформацией, дает информацию в отношении прочности определенного материала или структуры (рис. 15.6).
Рис. 15.6. Кривая «нагрузка-деформация»: A-B — область упругости; B-C — область пластичности, в которой наблюдается постоянная деформация; C — конечная точка излома, или повреждения; расстояние между A и В2 — количество постоянной деформации, которая наблюдалась бы в случае прекращения действия нагрузки в точке В1
Кривую «нагрузка-деформация» можно преобразовать в график «напряжение-деформация», разделив силу на площадь поперечного сечения ткани и изменение длины (деформацию) на исходную длину (напряжение = сила/площадь поперечного сечения и деформация = увеличение длины/исходная длина). Кривая «напряжение-деформация», в которой напряжение выражается в нагрузке на единицу площади, а деформация — в изменении на единицу длины (или приросте деформации в процентах) используется для сравнения характеристик прочности одного материала по сравнению с другим. Хотя каждый вид материала дает уникальную кривую, некоторые характеристики кривых материалов с одинаковыми свойствами могут быть также одинаковыми. Кривая «нагрузка-деформация», приведенная на рис. 15.6, дает информацию об упругости, пластичности, предельной прочности и жесткости материала, а также о количестве энергии, которую данный материал может запасать до момента излома. Первая область кривой от точки A до точки B является областью упругости. В этой области деформация материала не является устойчивой, и структура после прекращения нагрузки, возвратится в исходное состояние. Точка B является точкой, которая указывает на то, что данный материал перестает упруго реагировать, и после прекращения нагрузки здесь уже будет некоторая остаточная деформация. Таким образом, точка B обозначает конец области упругости, или предел упругости. Следующая область кривой, от B до C, является областью пластичности. В этой области деформация материала уже будет постоянной и сохранится после прекращения нагрузки. Если нагрузку убрать в точке B2, то количество постоянной деформации будет представлено расстоянием от A до B1. Если нагрузка продолжается в диапазоне пластичности, то материал будет деформироваться, вплоть до излома или разрушения в точке C. Материалы считаются хрупкими или эластичными, или сочетаниями первого и второго, в зависимости от количества деформации, которую они могут претерпевать до достижения конечной точки излома. У хрупких материалов, таких как стекло, область деформации до излома очень мала. Пластичные материалы, типа мягких металлов, могут до излома подвергаться значительной деформации. Материалы также обладают такими свойствами, как упругость и прочность. Упругость — это способность материала поглощать и запасать энергию в диапазоне упругости, и высвобождать ее и затем возвращаться в исходное состояние сразу же после прекращения нагрузки. Прочность — это способность материала поглощать энергию в пределах диапазона пластичности. Прочность отражает сопротивление материала излому или способность поглощать значительные количества энергии до разрушения. Модуль Юнга, или модуль упругости материала при нагрузке сжатия или растяжения, характеризуется наклоном кривой в промежутке между точками A и B (см. рис. 15.6). Значение жесткости можно найти, разделив нагрузку на деформацию в любой точке диапазона упругости. Модуль упругости определяет механическое поведение материала и является мерой его жесткости (сопротивления, оказываемого материалом внешней нагрузке). Модуль = Напряжение (нагрузка)/деформация Модуль Юнга = (F/A)/ΔL/L0) Если первая часть графика представляет собой прямую линию, деформация прямо пропорциональна способности материала к сопротивлению нагрузке (см. рис. 15.6). Если угол наклона кривой крутой, и модуль упругости высокий, то этот материал обладает высокой жесткостью. Если подъем, кривой идет постепенно, и значение модуля упругости невелико, то и жесткость материала незначительна. У корковой кости — высокий модуль упругости, а у подкожного жира — низкий. Любой тип материала обладает уникальной кривой, так на рис. 15.7 представлена типичная кривая для сухожилий и связок конечностей при действии нагрузки с постоянной скоростью.
Рис. 15.7. Кривая нагрузки/деформации для сухожилия или связки: 0-A — область подошвы кривой; A-В — область упругости; B-C — область диапазона пластичности; D — конечная точка разрыва
Первая область кривой 0-A называется подошвенной областью. Для связок и сухожилий эта область характеризуется выпрямлением завитков коллагена в состоянии покоя. В этой зоне минимальное усилие вызывает максимальную деформацию (удлинение). Подошвенная область — это зона, в которой исследователь проводит клиническое тестирование целостности связки при помощи растягивающего усилия.
Подошвенная область также представляет собой провисание сухожилия (слабину), которое должно быть выбрано мышцей, прежде, чем она сможет воздействовать через это сухожилие на кость. Вторая линейная область кривой A-B является областью упругости, в которой удлинение (деформация) имеет относительно линейную связь с напряжением. Жесткость, или сопротивление деформации в этой области увеличивается, поэтому для того, чтобы вызвать удлинение, требуется большее усилие. Однако в пределах этой области связка или сухожилие, если убрать нагрузку, возвращаются к размерам, которые они имели до создания напряжения, поскольку в силу вязкоупругости структур, возврат является функцией времени. Эта область показывает тот тип напряжения и деформации, который наблюдается при нормальном физиологическом движении. В третьей области B-C происходит последовательное разрушение волокон коллагена, и связка (сухожилие) теряет способность вернуться к исходной форме. Пластичность можно рассматривать как вариант микроскопического разрыва. При выходе за пределы диапазона пластичности, в точке D начинаются явные разрывы или макроразрывы ткани. В случае с сухожилием или связкой повреждение может произойти в середине структуры, по причине разрушения и разрывов волокон соединительной ткани, это и будет разрывом связки. Если повреждение происходит в виде отрыва костного прикрепления связки или сухожилия, это называют отрывом. Если происходит разрушение костной ткани, оно называется переломом. Каждый вид соединительной ткани может до разрушения выдерживать различную степень деформации. Эта степень различна не только для разных видов соединительной ткани, но может варьировать даже внутри одного типа. В целом связки могут выдерживать большую деформацию, чем хрящи, а хрящи — большую деформацию, чем кости.
15.3. Свойства специфических тканей
Кость. Кривые «напряжение-деформация» кости демонстрируют, что корковая кость жестче губчатой (трабекулярной) кости, соответственно, корковая кость может выдерживать большее напряжение, но меньшую деформацию. Когда корковая кость испытывает нагрузку сжатия, сила продольных отделов кости является наибольшей. В бедренной кости модуль упругости продольных отделов в два раза превышает значение модуля поперечных отделов. Компрессионная нагрузка и деформация, которую может выдерживать корковая кость, выше, чем напряжение и деформация растяжения. Иначе говоря, кость выдерживает сжатие лучше, чем растяжение. Применение сильных нагрузок в течение короткого времени или небольших, но продолжительных нагрузок, вызывает высокое напряжение и деформацию. Как и корковой кости, сопротивление сжатию у трабекулярной кости выше, чем сопротивление растяжению, однако модуль упругости при нагрузках растяжения выше, чем при сжатии. Физиологическая реакция трабекулярной кости на увеличение нагрузки — гипертрофия. Если нагрузка снижена или отсутствует, трабекулы уменьшаются и, как следствие, теряют способность обеспечивать опору. Действие скорости, частоты, продолжительности и типа нагрузки выражается в том, что повторные нагрузки (частое повторение при небольшой нагрузке или редкое повторение, но при высоких нагрузках) могут вызывать постоянную деформацию и приводить к повреждению кости. Деформация по типу крипа происходит тогда, когда на ткань воздействуют повторными нагрузками во время, когда материал подвержен именно крипу. Сухожилия. Крип в сухожилиях происходит, когда они подвергаются действию постоянной или непрерывной циклической нагрузке. Крип наблюдается также, когда сухожилие в напряжении, но длина его при этом не изменяется. Если длина сухожилия не меняется, то наступает расслабление натяжения в самой ткани, известное как «напряжение-расслабление». Если мышца, к которой прикреплено сухожилие, сокращается с достаточной силой, чтобы выпрямить «завитки» волокон в сухожилии, то такое выпрямление наблюдается в подошвенной части кривой «напряжение-деформация». В этой области имеется незначительное увеличение напряжение с удлинением и деформацией только в 1,2–1,5 %. Сила, которая растягивает уже выпрямленные волокна, выводит сухожилие в линейную область кривой, где существует линейная взаимосвязь между прилагаемой силой и возникающей в результате деформации ткани. Однако не все волокна полностью параллельны, и, таким образом, не все они полностью выпрямляются. В результате, первыми будут повреждаться те волокна, которые раньше полностью выпрямились. Основная часть нормальной активности сухожилий происходит в подошвенной части кривой и в первой части линейной области. Когда нагрузка выходит за пределы линейной области, первым повреждением оказывается внутрифибрилльное проскальзывание между молекулами, затем — межфибрилльное проскальзывание (между фибриллами), и, в конце концов, происходит массовое разрушение коллагеновых волокон. Площадь поперечного сечения и длина сухожилия определяют количество силы, с которой может сопротивляться сухожилие и степень удлинения, которое оно способно выдержать. Физиологической реакцией сухожилий на чередующееся натяжение является прирост их толщины и силы. Сухожилия усиливаются при воздействии на них сил растяжения в большей степени, чем при действии сил сжатия и смещения (растяжения). Обычно более крупные сухожилия выдерживают большие усилия, чем сухожилия мелкие. Отличия кривых «напряжение-деформация» разных сухожилий обычно отражают различия пропорций коллагена типов I и II, различия в структуре образования поперечных молекулярных связей, в зрелости волокон коллагена, организации фибрилл, вариации концентрации основной субстанции и уровень гидратации. По мнению Benjamin и Ralphs, самым обычным местом возникновения дегенеративных изменений является энтезис, а мышечно-сухожильное соединение — основное место мышечной тяги и растяжения. В нормальных условиях концы сухожилия являются более уязвимыми, чем его средняя часть. Однако в тех же нормальных условиях разрывы сухожилий наблюдаются редко, и сухожилия могут выдерживать значительные усилия растяжения без каких-либо травматических последствий. При иммобилизации в мышечно-сухожильных соединениях развивается атрофия и наблюдается уменьшение коллагена. Сухожилия, которые подвергаются постоянным нагрузкам сжатия, изменяют структуру и функцию (у них ослабевает сопротивление растяжению). Связки. Тестирование связок аналогично тестированию сухожилий в том плане, что нагрузка растяжения подается на изолированную связку, и затем строится график ее поведения (кривая «нагрузка-деформация»). Вязкоупругое поведение связок характерно наличием области крипа и «напряжения-расслабления». Связки показывают крип при применении фиксированной нагрузки, причем длина связки продолжает увеличиваться либо до точки достижения нового равновесия, либо до точки разрыва. Напряжение-расслабление наблюдается тогда, когда связку растягивают до фиксированной длины и в таком состоянии удерживают; со временем количество нагрузки на связку уменьшается (связка «расслабляется»). Полагают, что нагрузка уменьшается за счет ее ослабления в вязком компоненте связки. Нагрузка ослабевает, пока в связке не достигается новая точка равновесия. Постоянные взаимные подстройки друг под друга поведения вязкого и упругого компонентов позволяют связке функционировать без повреждений в достаточно широком диапазоне нагрузок. Физиологической реакцией связок на переменную нагрузку растяжения является рост толщины и силы связки. Связки являются более изменчивыми, чем сухожилия, так как они выдерживают усилия сжатия и сдвига так же хорошо, как нагрузки растяжения. Хрящ. По Cohen и Mow, в хряще действуют три силы, направленные на уравновешивание нагрузок и ответственные за вязкоупругое поведение хряща. Этими силами являются: 1) напряжение, развивающееся во внеклеточной матрице; 2) давления, развиваемые в жидкой фазе; 3) фрикционная тяга, вызванная током жидкости через внеклеточную матрицу. Сжатие хряща вызывает изменение его объема. Объемные изменения ведут к изменению давления, что создает ток интерстициальной жидкости. Ток жидкости через внеклеточную матрицу создает значительно сопротивление трения току в тканях (фрикционная тяга). Во время крипа, вызванного силой сжатия, выход жидкости сначала идет быстро и вызывает быструю сопутствующую деформацию. Далее ток жидкости и деформация постепенно уменьшаются и прекращаются, когда напряжение в хряще приходит в равновесие с действующей нагрузкой. Исследования с помощью ядерного магнитного резонанса (ЯМР) дали возможность изучения изменений объема и толщины хряща в живых суставах. При ЯМР — исследовании коленных суставов 8 добровольцев, Eckstein и соавторы обнаружили, что в течение 3–7 мин после нагрузки (50 сгибаний колена) хрящ коленной чашечки теряет до 13 % жидкости. В результате усилий сжатия, в хряще возникают и напряжения растяжения, так называемые «напряжения типа обруча». Хотя поведение хряща при растяжении аналогично поведению связок и сухожилий в том, что все эти ткани показывают нелинейные реакции на растяжение, причина такого поведения в хряще несколько иная. Нелинейная деформация в подошвенном регионе кривой вызвана силой тяги, которая требуется для того, чтобы решетка коллагена проскользнула через ПГ. Нелинейное поведение в связках и сухожилиях связано с выпрямлением коллагеновых волокон. В хряще, как и в связках и сухожилиях, волокна коллагена натягиваются в линейной области кривой и демонстрируют линейный характер поведения. Однако образцы, взятые из различных зон хряща (I, II, и III) показывают различия реакций растяжения. Эти различия связывают с разной ориентацией волокон коллагена в этих зонах и считают, что именно они и представляют собой анизотропный эффект. Сопротивление хряща сдвигу зависит от количества имеющегося коллагена, поскольку ПГ оказывают сдвигу незначительное сопротивление. Напряжения сдвига развиваются в зоне перехода между отвердевшим слоем хряща и субхондральной костью. Свойства соединительной ткани, описанные в главе 15, служат для читателя введением в природу компонентов сустава и должны помочь читателю понять основы структуры и функции сустава. Следующие главы 16 и 17 включают в себя традиционную систему классификации суставов человека и подробное описание структуры и функции синовиального сустава.
Глава 16 АРХИТЕКТУРА СУСТАВА ЧЕЛОВЕКА
Понимание того, насколько сложно устроен сустав человека, приходит, когда рассматриваешь структуру его костных компонентов и функции, которые этот сустав должен выполнять. В скелете человека насчитывается около 200 костей, которые должны соединяться суставами. Размер этих костей различен: дистальная фаланга мизинца ноги — размером с горошину, а бедренная кость — свыше 40 см длиной. Форма костей может быть круглой, а может быть плоской, контуры концов костей могут быть как выпуклыми, так и вогнутыми. Задача создания набора суставов для соединения всех этих разнообразных компонентов и создания из них устойчивой структуры может оказаться очень трудной. Задача по проектированию таких суставов, которые могли бы работать вместе, одновременно обеспечивая как устойчивость, так и подвижность всей структуры, представляет собой сложнейшую инженерную проблему. Строение суставов в человеческом организме весьма разнообразно: от простых до сложных. Хотя в целом архитектура суставов достаточно сложна, в них используются те же принципы, что и в шарнирах ножки стола. Более простые по строению суставы обычно предназначены для обеспечения устойчивости, основной функцией более сложных суставов, как правило, является подвижность. Однако большинство суставов человека вынуждено выполнять двойную функцию: обеспечивать как подвижность, так и устойчивость, а также гарантировать еще и динамическую устойчивость. Суставы, предназначенные для обеспечения устойчивости, по строению аналогичны шарнирам ножки стола в том плане, что концы костей в этих суставах имеют такие поверхности, которые либо хорошо «подогнаны» друг к другу по форме, либо являются плоскими, что обеспечивает постоянный хороший контакт. Роль креплений в человеческих суставах выполняют суставные капсулы, связки и сухожилия. Суставы, предназначенные для обеспечения подвижности человека, называются синовиальными суставами. Эти суставы построены так, что концы костных компонентов покрыты гиалиновым хрящом и заключены в синовиальную оболочку (суставная капсула). Капсулы, связки и сухожилия, расположенные вокруг суставов подвижности (синовиальных), не только помогают обеспечивать стабильность сустава, но также направляют, ограничивают и разрешают выполнять движения. «Клинья» из хрящей, которые называют менисками, дисками, пластинками и губами, используются в синовиальных суставах для увеличения стабильности, поглощения ударов, а также для облегчения движений (см. рис. 14.2). Кроме того, во всех синовиальных суставах выделяется смазочная жидкость, называемая синовиальной жидкостью. Она помогает уменьшить трение между суставными поверхностями. При традиционном методе классификации суставов суставы (артрозы или сочленения) человеческого тела делятся на две большие категории, основанные на типе материалов и методов, используемых для соединения костных компонентов. Подразделы этих категорий основываются на используемых материалах, форме и контурах суставных поверхностей и типе допускаемого движения. Этими двумя большими категориями артрозов являются синартрозы (несиновиальные суставы) и диартрозы (синовиальные суставы).16.1. Синартрозы
Материалом, используемым для соединения костных компонентов в синартроидальных суставах, является межкостная соединительная ткань (фиброзная или хрящевая). Синартрозы делятся на две группы, в соответствии с типом соединительной ткани, используемой для соединения кости с костью. Это фиброзные и хрящевые суставы. Соединительная ткань непосредственно соединяет одну кость с другой, образуя твердый соединительный интерфейс «ткань-кость». Фиброзные суставы. В фиброзных суставах фиброзная ткань непосредственно соединяет кость с костью. В человеческом теле имеются три разных типа фиброзных суставов: швы, гомфозы (гроздевидные укрепления) и синдесмозы. Шов — это сустав, в котором два костных компонента соединены коллагеновой шовной связкой или мембраной. Концы костных компонентов имеют такую форму, что они или смыкаются, или перекрывают друг друга. Этот тип суставов встречается только в черепе и на ранних стадиях жизни позволяет выполнять небольшие движения. Далее, с возрастом, происходит сращение двух противоположных костей, которое приводит к образованию костного соединения, называемого синостозом. * * *
ПРИМЕР 1. Венечный шов (рис. 16.1). Зубчатые края теменной и лобной костей соединяются тонкой фиброзной мембраной (шовная связка) и образуют венечный шов. При родах фиброзная мембрана разрешает некоторое движение, облегчающее прохождение через родовой канал. Некоторая подвижность сохраняется и в детском возрасте, что позволяет расти и мозгу, и черепу. Во взрослом возрасте кости срастаются и образуют синостоз, движение в котором уже практически невозможно.
Рис. 16.1. Венечный шов. Лобная и теменная кости черепа соединяются напрямую фиброзной тканью и образуют синартрозный сустав (шов) * * * Гомфоз — это сустав, в котором поверхности костных компонентов подходят друг к другу по типу «шип-отверстие». В этом типе суставов составные части соединяются фиброзной тканью. Единственными гомфозными суставами в теле человека являются соединения зубов с нижней и верхней челюстью. * * *
ПРИМЕР 2. Конический отросток зуба входит в костную лунку нижней или верхней челюсти. У взрослых людей потеря зубов происходит в большинстве случаев из-за болезни, поражающей соединительную ткань, удерживающую зуб в кости. При нормальном состоянии подвижность в этих суставах у взрослых отсутствует.* * * Синдесмоз — это вид фиброзного сустава, в котором костные компоненты соединены напрямую межкостной связкой, фиброзным тяжом или апоневрозной мембраной. Эти суставы обычно обладают небольшой подвижностью. * * *
ПРИМЕР 3. Стержень большой берцовой кости соединен напрямую со стержнем малой берцовой кости при помощи межкостной мембраны (рис. 16.2). Небольшое движение в этом суставе сопровождает движение голеностопного сустава.
Рис. 16.2. Синартроидальный синдесмоз, который образуют стержни большой и малой берцовых костей, соединяющихся напрямую при помощи мембраны
Хрящевые суставы. Материалы, используемые для соединения двух костных компонентов в хрящевых суставах, представлены либо волокнистым, либо гиалиновым хрящом. Эти материалы используются для непосредственного соединения одной костной поверхности с другой, образуя интерфейс типа «кость/хрящ/кость». Есть два типа хрящевых суставов: симфизы и синхондрозы. В симфизе (вторичный хрящевой сустав) два костных компонента покрыты тонкой пластинкой гиалинового хряща и соединены напрямую при помощи волокнистого хряща в форме диска или подушечки. Примеры симфизов: межпозвоночные суставы (между телами позвонков), сустав между рукояткой и телом грудины, лобковый симфиз в тазе. * * *
ПРИМЕР 4. Лонный симфиз (рис. 16.3,а). Две лонные кости таза соединены волокнистым хрящом. Сустав должен работать как несущий вес и отвечать за сопротивление и передачу силы; таким образом, при нормальном состоянии позволительной и желательной является его очень небольшая подвижность. Во время беременности, когда соединительные ткани смягчаются, происходит небольшое расхождение суставных поверхностей, облегчающее прохождение ребенка через родовой канал. Однако лонный симфиз считается прежде всего суставом устойчивости, с толстым диском из волокнистого хряща, формирующим устойчивое соединение двух костных компонентов.
Рис. 16.3. Хрящевые суставы: две лонные кости таза напрямую соединяются волокнистым хрящом и образуют симфиз, называемый лонным симфизом, или лонным сращением, (а) и первое ребро и грудина соединяются напрямую гиалиновым хрящом и образуют синхондроз, называемый первым реберно-грудинным суставом (b) * * * Синхондроз (первичный хрящевой сустав) — это тип сустава, в котором материалом, используемым для соединения двух компонентов, является гиалиновый хрящ. Хрящ образует связь между двумя окостеневшими центрами кости. Функция этого типа сустава в том, чтобы позволять кости расти, сохраняя при этом устойчивость и допуская лишь небольшую подвижность. Некоторые из таких суставов обнаруживаются в черепе и других областях тела, в зонах роста костей. Когда рост кости заканчивается, некоторые из таких суставов окостеневают и превращаются в костные соединения (синостозы). * * *
ПРИМЕР 5. Первый реберно-грудинный сустав (рис. 16.3,b). Смежные суставные поверхности первого ребра и грудины соединяются напрямую суставным хрящом.
16.2. Диартрозы
Метод построения сустава в диартрозах или синовиальных суставах отличается от используемого в синартрозах. В синовиальных суставах концы костных компонентов свободно движутся относительно друг друга, так как смежные костные поверхности никакой соединительной тканью не связаны. Они соединены друг с другом не напрямую, а посредством суставной капсулы, которая охватывает сустав. Все синовиальные суставы построены по схожему принципу и имеют следующие общие признаки: 1) суставную капсулу, состоящую из двух слоев; 2) суставную полость, окруженную суставной капсулой; 3) синовиальную ткань, которая выстилает внутреннюю поверхность капсулы; 4) синовиальную жидкость, образующую пленку на суставных поверхностях; 5) гиалиновый хрящ, покрывающий поверхности соприкасающихся костей (рис. 16.4).
Рис. 16.4. Типичный синовиальный сустав (диартроз)
Кроме этого, синовиальные суставы связаны с такими вспомогательными структурами, как диски из волокнистого хряща, пластинки или мениски, губы, жировые прокладки, а также связки и сухожилия. Суставные диски, мениски и синовиальная жидкость помогают предотвратить избыточное сжатие суставных поверхностей. Суставные диски и мениски часто встречаются между суставными поверхностями, плохо совпадающими друг с другом. Суставные диски могут занимать всю площадь между суставными поверхностями и, по сути, делить сустав на две раздельные полости (суставной диск в дистальном лучелоктевом суставе). Мениски обычно не разделяют сустав, но обеспечивают смазку и увеличивают степень совместимости. Связки и сухожилия, связанные с этими суставами, играют важную роль, удерживая суставные поверхности вместе и направляя движение. Избыточное расхождение суставных поверхностей ограничивается натяжением связок, фиброзной суставной капсулы и сухожилий. Его ограничивает также активное натяжение мышц. Суставная капсула. Суставные капсулы сильно различаются как по толщине, так и по составу. Капсулы такого типа, которые охватывают плечевой сустав, являются тонкими, свободными, просторными и, таким образом, жертвуют стабильностью в пользу подвижности. Другие капсулы, такие как капсула тазобедренного сустава, являются толстыми и плотными и в большей степени благоприятствуют устойчивости, чем подвижности. Сам факт того, что толщина, ориентация волокон и даже состав капсулы в большой степени зависят от нагрузок, которые приходятся на сустав, указывает на динамический характер капсулы. Например, в тех частях, в которых капсула подвержена действию сил сжатия, она может состоять из волокнистого хряща. Капсулы плечевого сустава у пациентов с неустойчивостью сустава (например, у которых капсулы постоянно подвергаются деформации растяжения), имеют значительно большее количество волокон коллагена среднего диаметра и повышенную плотность волокон эластина, по сравнению с обычными капсулами. Эти изменения фибрилл коллагена и плотности эластина интерпретируют, как адаптацию капсулы, ориентированную на увеличение силы капсулы и сопротивление ее деформациям растяжения. Фиброзная капсула может быть усилена и в некоторых случаях включает в себя в качестве составных частей связки или сухожилия. Например, капсула проксимального межфалангового сустава пальцев рук усилена на поверхности коллатеральными связками и, по поверхности и кзади, сухожилием разгибателя. Суставная капсула состоит из двух слоев, внешнего слоя, называемого фиброзным (волокнистым) и внутреннего, называемого синовиальным (см. рис. 16.4). Волокнистый слой, который иногда называют фиброзной капсулой, состоит из плотной фиброзной ткани. Примерно 90 % сухого веса, 70 % сырого веса приходится на воду. Основным типом волокон коллагенаявляются волокна типа I, организованные по типу параллельных пучков. По мере приближения капсулы к месту прикрепления к кости, пучки коллагена переходят в неотвердевший волокнистый хрящ (это начальное изменение). Далее, неотвердевший волокнистый хрящ переходит в отвердевший хрящ, а затем — в кость. Фиброзный слой имеет слабую сосудистую сеть, но зато богатую иннервацию суставными рецепторами. Рецепторы располагаются по всей капсуле. Внутренний (синовиальный) слой — это ткань, выстилающая капсулу. Он также состоит из двух слоев, интимы и субсиновиальной ткани. Интима — это слой клеток, выстилающих суставное пространство. Он состоит из слоя особых фибробластов, известных под названием синовиоцитов, которые организованы слоем от одной до трех клеток в глубину и скомпонованы с безволоконной межклеточной матрицей. Обычно различают два типа синовиоцитов: тип A и тип B. Синовиоциты типа A — это клетки, напоминающие макрофаги с выдающимся аппаратом Гольджи, но с редким гранулярным эндоплазматическим ретикулюмом. Синовиоциты типа B, наоборот, обладают богатым гранулярным эндоплазматическим ретикулюмом и в нормальном синовии их в два раза больше, чем клеток типа A. Основной обязанностью клеток типа A является удаление «мусора» из полости сустава. Во время фагоцитоза клетки типа A синтезируют и выделяют растворяющие энзимы, которые, потенциально, могут вызывать повреждения суставных тканей. Клетки типа B синтезируют и выделяют ингибиторы энзимов, угнетающие действие энзимов-растворителей. Клетки типа B также отвечают за начало иммунной реакции путем секреции антигенов. В части своей функции сохранения сустава, оба типа клеток синтезируют такой компонент синовиальной жидкости, как гиалуроновую кислоту, а также — составные элементы матрицы, в которые встраиваются клетки. Клетки типов A и B также выделяют значительное количество цитокинов, таких как фактор некроза опухоли — а, интерферон — у, фибронектин и различные факторы роста. Взаимодействие цитокинов, действующих в качестве стимуляторов или ингибиторов синовиоцитов, направлено на структурное восстановление синовия, реакции на чужеродные или аутологичные антигены и на разрушение тканей. Субсиновиальная ткань находится снаружи интимы и представляет собой свободную сеть из сильно васкулризованной соединительной ткани. Она прикрепляется к краям суставного хряща через переходную зону волокнистого хряща и соединяется с надкостницей, покрывая части костей, находящиеся в пределах капсулы. Ее клетки слегка отличаются от клеток интимы: их форма ближе к веретену, и они более широко рассеяны между фибриллами коллагена, чем клетки интимы. Они также вырабатывают матричный коллаген. Субсиновиальная ткань обеспечивает поддержку интимы и сливается своей внешней поверхностью с фиброзной капсулой. Субсиновиальная ткань насыщена капиллярными, лимфатическими сосудами и нервными волокнами. По сосудам субсиновиальной ткани к суставу переносится кислород, питательные вещества и иммунологические клетки. В фиброзную суставную капсулу входят ветви примыкающих периферических нервов и ветви нервов, идущих от мышц. В фиброзной капсуле присутствуют сенсорные эфферентные нервы большого диаметра и тонкие миелинизированные нервы; немиелинизированные волокна типа С обнаруживаются с синовии. Суставные рецепторы, находящиеся в фиброзной суставной капсуле, чувствительны к растяжению или сжатию капсулы, а также к повышению внутреннего давления, связанному с повышенной выработкой синовиальной жидкости. Большинство суставных рецепторов колена расположено в субсиновиальном слое капсулы, в непосредственной близости от прикрепления передней крестообразной связки (ПКС). Механорецепторы (преимущественно рецепторы Руффини) в субсиновиальной капсуле и ПКС реагируют прежде всего на растяжение при предельном разгибании и в меньшей степени на сжатие при движении сгибания частично разогнутого колена. Рецепторы Пачини встречаются реже, считается, что они активируются при сжатии. Свободные нервные окончания более многочисленны, чем механорецепторы и действуют как ноцицепторы, реагирующие на воспаление и болевые стимулы. Афферентные свободные нервные окончания в суставах не только передают информацию, но также играют роль локальных эффекторов, выделяющих нейропептиды. Рецепторы, находящиеся в суставных капсулах, перечислены в табл. 16.1.
Синовиальная жидкость. Тонкая пленка синовиальной жидкости, которая покрывает поверхности внутреннего слоя суставной капсулы и суставные хрящи, смазывает суставные поверхности и уменьшает трение между костными компонентами. Жидкость, покрывающая суставные поверхности, также обеспечивает питание гиалинового хряща. Состав синовиальной жидкости схож с плазмой крови, за одним исключением: синовиальная жидкость содержит гиалуронат (гиалуроновую кислоту) и гликопротеин, называющийся любрисин. Гиалуронат в синовиальной жидкости отвечает за ее вязкость и необходим для смазки синовия. Гиалуронат снижает трение между синовиальными складками капсулы и суставными поверхностями. Предполагается, что любрисин в синовиальной жидкости оказывает влияние на смазку между хрящами. Изменения концентрации гиалуроната и любрисина в синовиальной жидкости влияют на смазку в целом и, соответственно, степень трения. Многими экспериментами подтверждено, что суставные коэффициенты трения (СКТ) в синовиальных суставах ниже, чем при использовании промышленных смазочных веществ. Чем ниже СКТ, тем ниже сопротивление при скольжении. Нормальная синовиальная жидкость — это прозрачная вязкая жидкость бледно-желтого цвета, находящаяся в небольших количествах в синовиальных суставах. Имеется прямой обмен за счет диффузии между сосудистой сетью синовиального слоя и внутрикапсульного пространства, куда доставляются питательные вещества и удаляются продукты обмена. Обычно из больших суставов, таких как коленный, можно извлечь не более 0,5 мл синовиальной жидкости. Однако в случае повреждения или заболевания сустава, объем жидкости может увеличиваться. Свойства синовиальной жидкости — такие же, как у всех вязких жидкостей: они могут сопротивляться нагрузкам смещения. Вязкость жидкости изменяется обратно пропорционально скорости сустава или степени смещения. Таким образом, синовиальная жидкость относится к разряду тиксотропных. Когда костные компоненты сустава движутся быстро, вязкость жидкости уменьшается, и она создает меньшее сопротивление движению. При медленном движении костных компонентов вязкость возрастает, и жидкость оказывает большее сопротивление. Вязкость также зависит от изменения температуры. Высокая температура уменьшает вязкость, низкая — увеличивает. Смазка сустава. Для объяснения того, как диартроидальные суставы смазываются в состояниях разной нагрузки, было предложено множество моделей. Было достигнуто некоторое согласие в том плане, что ни одна из предложенных моделей не является адекватной для объяснения того, как происходит смазка человеческого сустава, и что суставы смазываются двумя, а то и более способами, известными в механике. Двумя основными способами являются граничная смазка и жидкая смазка. Граничная смазка наблюдается в тех случаях, когда каждая нагружаемая поверхность покрыта или пропитана тонким слоем крупных молекул, образующих гель, не позволяющий контактным поверхностям касаться друг друга (рис. 16.5,а). Молекулы скользят по противоположной поверхности легче, чем сдвигаются по поверхности, которую они покрывают. В диартроидальных суставах человека эти молекулы состоят из находящегося в синовиальной жидкости особого гликопротеина, называемого любрисином. Молекулы любрисина прилипают к суставным поверхностям. Этот тип смазки считается наиболее эффективным при небольших нагрузках.
Рис. 16.5. Модели смазки сустава. Схематическое представление: a — молекул любрисина, покрывающих суставные поверхности при граничной смазке; b — жидкостной пленки, разделяющей суставные поверхности при гидростатической смазке
Модели жидкой смазки включают в себя гидростатическую смазку (смазка выделением), гидродинамическую смазку, смазку по типу пленки под давлением, упруго-гидродинамическую смазку и форсированную смазку. В целом все модели жидкой смазки подразумевают наличие пленки, находящейся между суставными поверхностями. Гидростатическая смазка (смазка выделением) — это форма жидкой смазки, при которой несущие нагрузку поверхности разделены пленкой смазочного материала, которая постоянно находится под давлением (рис. 16.5,b). В механике такое давление обычно создается при помощи внешнего насоса. В человеческом теле роль насоса выполняют сокращения мышц, окружающих сустав. Сжатие суставного хряща вызывает его деформацию и «выпотевание» жидкости, образующей жидкую пленку на суставной поверхности. Это возможно потому, что герметичный слой отвердевшего хряща не пропускает жидкость в субхондральную кость. Когда нагрузка заканчивается, жидкость впитывается обратно в суставной хрящ. Этот тип смазки оказывается наиболее эффективным в условиях больших нагрузок, однако он может быть эффективным, в принципе, в большинстве случаев. Гидродинамическая смазка — это форма жидкой смазки, при которой между двумя непараллельными поверхностями, скользящими друг по другу, создается клин из жидкости. Возникающее в жидкостном клине давление и вязкость самой жидкости не позволяет сблизиться суставным поверхностям. При смазке пленкой под давлением давление в жидкой пленке создается за счет движения перпендикулярных друг другу суставных поверхностей. При сближении суставных поверхностей они выдавливают пленку из площади возможного контакта. Возникающее вследствие вязкости жидкости давление не дает поверхностям сблизиться. Этот тип смазки хорош для высоких нагрузок, которые надо выдерживать в течение короткого времени. При упруго-динамической модели, необходимая толщина защитной жидкой пленки сохраняется за счет упругой деформации суставных поверхностей. При форсированной смазке (ее еще называют смазкой нагнетанием) пулы сконцентрированных молекул гиалурона фильтруются из синовиальной жидкости и захватываются естественными неровностями и областями упругой деформации суставной поверхности при сближении противоположных поверхностей. Представленные модели смазки сустава дают разнообразные возможности объяснения того, как смазываются диартроидальные суставы. Разнообразие условий, в которых приходится функционировать суставам человека, подсказывает, что работает, вероятнее всего, сразу несколько моделей смазки. До тех пор, пока не будет предложена, доказана и принята единая модель смазки суставов, точные механизмы, обеспечивающие такую смазку, остаются предметом для обсуждения.
16.2.1. Подклассификации диартроидальных суставов Традиционно, синовиальные суставы делились на три основных категории, основанные на количестве осей, по которым совершается «общее видимое» движение. Дальнейшее подразделение суставов основано на форме и конфигурации концов костных компонентов. Три основные традиционные категории: одноосные, двухосные и трехосные суставы. Одноосный сустав построен так, что видимое движение костных компонентов допускается только в одной плоскости и вокруг одной оси. Ось движения обычно располагается около центра сустава или в одном из костных компонентов. Поскольку одноосные суставы допускают видимое движение только в одной плоскости, или вокруг одной оси, они описываются как имеющие 1° степени свободы движения. В теле человека находятся два типа одноосных диартроидальных сустава: это блоковидные суставы и шарнирные суставы. Блоковидный сустав — это такой тип сустава, который напоминает дверную петлю. * * *
ПРИМЕР 6. Межфаланговый сустав пальцев рук (рис. 16.6,а). Эти суставы образуются между дистальным концом одной фаланги и проксимальным концом другой. Суставные поверхности имеют такую форму, что движение может выполняться только в сагиттальной плоскости (сгибание и разгибание) вокруг венечной оси (рис. 16.6,b).
Рис. 16.6. Одноосный блоковидный сустав: a — межфаланговые суставы пальцев рук являются примерами простых блоковидных суставов. Суставная капсула и вспомогательные суставные структуры удалены, чтобы показать костные компоненты при виде сустава сверху; b — движение выполняется в одной плоскости вокруг одной оси * * * Одноосные суставы. Шарнирный (трохоидный) сустав — это тип сустава, построенного так, что один из компонентов имеет форму кольца, а второй — такую форму, что может вращаться внутри этого кольца. * * *
ПРИМЕР 7. Атлантоосевой сустав (рис. 16.7). Часть сустава, представляющая собой кольцо, образована атлантом и поперечной связкой. Зубовидный отросток (зуб) осевого позвонка, находящийся в кольце, вращается внутри этого костно-связочного кольца. Движение происходит в поперечной плоскости вокруг продольной оси.
Рис. 16.7. Шарнирный сустав. Сустав между атлантом, поперечной связкой и зубом осевого позвонка является одноосным диартроидальным суставом, называемым срединным атлантосевым суставом. Вращение происходит в поперечной плоскости вокруг вертикальной оси
Двухосные суставы. Двухосные диартроидальные суставы — это суставы, костные компоненты которых могут двигаться в двух плоскостях вокруг двух осей. Таким образом, такие суставы имеют 2° свободы. Существуют два типа двухосных суставов: мыщелковый и седловидный. Суставные поверхности мыщелкового сустава имеют такую форму, которая позволяет вогнутой поверхности одного костного компонента скользить по выпуклой поверхности другого компонента в двух направлениях. * * *
ПРИМЕР 8. Пястно-фаланговый сустав (рис. 16.8,а). Пястно-фаланговый сустав образован выпуклым дистальным концом пястной кости и вогнутым проксимальным концом проксимальной фаланги. Сгибание и разгибание этого сустава выполняются в сагиттальной плоскости вокруг горизонтальной оси (рис. 16.8,b). Отведение — это движение от среднего пальца, приведение — движение по направлению к нему. Отведение и приведение выполняются во фронтальной плоскости вокруг переднезадней (ПЗ) оси (рис. 16.8,с).
Рис. 16.8. Мыщелковый сустав: а — пястно-фаланговые суставы пальцев являются двухосными мыщелковыми суставами. Суставная капсула и вспомогательные структуры удалены, чтобы были видны костные компоненты. Движение в этих суставах происходит в двух плоскостях вокруг двух осей; b — сгибание и разгибание происходят в сагиттальной плоскости вокруг венечной оси; с — отведение и приведение выполняются во фронтальной плоскости вокруг ПЗ оси * * * Седловидный сустав — это сустав, в котором обе суставные поверхности являются выпуклыми в одной плоскости и вогнутыми в другой, и эти поверхности стыкуются друг с другом наподобие всадника в седле. * * *
ПРИМЕР 9. Пястно-запястный сустав большого пальца. Пястно-запястный сустав большого пальца образован дистальным концом запястной кости и проксимальным концом пястной кости. Возможные движения — это сгибание-разгибание и приведение-отведение.* * * Трехосные суставы. Трехосные или многоосные диартроидальные суставы — это суставы, в которых костные компоненты свободно движутся в трех плоскостях вокруг трех осей. Движение в этих суставах также может происходить в косых плоскостях. Эти суставы имеют 3° свободы. Основными типами этих суставов являются плоские суставы и суставы по типу шарового шарнира. Плоские суставы имеют очень разные конфигурации поверхностей и допускают скольжение между двумя и более костями. * * *
ПРИМЕР 10. Запястные суставы. Эти суставы находятся между смежными поверхностями запястных костей. Прилегающие поверхности могут скользить друг по другу или вращаться по отношению друг к другу в любой плоскости.* * * Шаровые шарнирные суставы образуются шарообразной выпуклой поверхностью, которая входит в соответствующее гнездо. Допустимые движения — сгибание/разгибание, отведение/приведение и ротация. * * *
ПРИМЕР 11. Тазобедренный сустав. Он образован головкой бедренной кости и гнездом, называемым вертлужной впадиной (рис. 16.9,а). Движения сгибания/ разгибания происходят в сагиттальной плоскости вокруг венечной оси (рис. 16.9,b). Отведение/приведение происходит во фронтальной плоскости вокруг ПЗ оси (рис. 16.9,с), а ротация бедренной кости осуществляется в поперечной плоскости вокруг продольной оси (рис. 16.9, d).
Рис. 16.9. Шаровой шарнирный сустав: a — сустав между головкой бедренной кости и вертлужной впадиной, т. е. тазобедренный сустав, является трехосным диартроидальным суставом. Движение выполняется в трех плоскостях вокруг трех осей; b — сгибание/разгибание происходит в сагиттальной плоскости вокруг венечной оси; c — отведение/приведение выполняется во фронтальной плоскости вокруг ПЗ оси; d — ротация выполняется в поперечной плоскости вокруг продольной оси
Глава 17 ФУНКЦИЯ СУСТАВА
Строение суставов в человеческом теле отражает функции, для которых они предназначены. Синартроидальные суставы довольно просты и действуют прежде всего как суставы устойчивости, хотя движение в них и происходит. Диартроидальные суставы более сложны и предназначены в основном для обеспечения подвижности, хотя все они служат в определенной степени, и для поддержания устойчивости. Эффективное функционирование всей структуры зависит от интегрального действия многих суставов; одни создают стабильность, другие обеспечивают подвижность. В целом, если нужно поддерживать нормальную функцию, то стабильность должна быть более приоритетной.17.1. Кинематические цепи
Некоторые из суставов в организме человека последовательно связаны таким образом, что движение в одном из них сопровождается движением в соседнем. Например, когда стоящий прямо человек сгибает оба колена и должен при этом оставаться в вертикальном положении, то одновременное движение происходит в голеностопном и тазобедренном суставе (рис. 17.1,а). Однако, когда одна нога отрывается от земли, то колено может сгибаться, не вызывая движения ни в тазобедренном, ни в голеностопном суставе (рис. 17.1,b).
Рис. 17.1. Закрытая и открытая кинематическая цепь: a — в закрытой кинематической цепи сгибание коленей сопровождается сгибанием в тазобедренном суставе и тыльным сгибанием в голеностопном суставе; b — сгибание колена в открытой кинематической цепи может происходить как с движением в тазобедренном и голеностопном суставах, так и без него. На рисунке сгибание колена показано без одновременного движения в других суставах
Тип движения, возникающий в суставах нижних конечностей стоящего человека, можно объяснить, используя понятие кинематической цепи. Кинематические цепи в инженерном смысле состоят из последовательности жестких звеньев, соединенных серией шарнирных соединений. В механике система шарниров и звеньев построена так, чтобы движение одного звена в одном из шарниров вызывало движение всех других шарниров и звеньев цепи, причем вполне предсказуемым образом. В механике и инженерном деле кинематические цепи образуют закрытую систему или закрытую кинематическую цепь. В человеческом организме (как системе суставов и звеньев) суставы нижних конечностей и таза работают как закрытая кинематическая цепь в том случае, если человеку надо остаться в вертикальном, несущем вес положении. Закрытой эта цепь оказывается потому, что нижние концы конечностей фиксированы на земле, а верхние концы — виртуально фиксированы в тазе. Однако концы человеческих конечностей часто не закреплены и движутся совершенно свободно, никоим образом не затрагивая другие суставы. Если человеку надо помахать рукой, он вполне может сделать это только кистью, не двигая ни пальцами, ни локтем или плечом. Если концы конечностей или части тела движутся свободно, не вызывая движения в других суставах, эту систему рассматривают как открытую кинематическую цепь. В открытой кинематической цепи движение не столь предсказуемо, так как суставы могут действовать как в унисон, так и совершенно независимо. * * *
ПРИМЕР 12. Можно взмахнуть всей верхней конечностью, двигая рукой в плечевом суставе (рис. 17.2,а), а можно совершать движения только в лучезапястном суставе. В первом случае для дистального сегмента (кисть) доступны все степени свободы всех суставов от плечевого до лучезапястного. Однако если человек двигает только кистью в лучезапястном суставе, то для нее будут доступными только степени свободы движения данного сустава, и движение кисти в пространстве будет более ограниченным, чем в первой ситуации (рис. 17.2,b).
Рис. 17.2. Движение в открытой кинематической цепи: a — когда вся верхняя конечность движется в плечевом суставе, кисти предоставляется 7° свободы движения (сумма степеней свободы движения в плечевом, локтевом и лучезапястном суставах; b — кисть имеет только 2° свободы, и ее движение в пространстве ограничено * * * Концепция кинематических цепей, которая полезна для анализа человеческих движений и последствий травм и заболеваний, будет нам постоянно встречаться в этой книге. Хотя суставы человека, как в открытых, так и в закрытых цепях, не всегда ведут себя предсказуемо, они все же являются взаимозависимыми. Изменение функции или структуры одного сустава в системе обычно вызывает изменение функции сустава, либо непосредственно примыкающего к нему, либо дистального. Например, если ограничена амплитуда движения (АД) коленного сустава, тазобедренный и голеностопный суставы будут вынуждены компенсировать это ограничение таким образом, чтобы при движении стопа отрывалась от опоры, и человек не спотыкался.
Глава 18 ДВИЖЕНИЕ В СУСТАВЕ
18.1. Артрокинематика
Движение в суставе происходит в результате перемещения одной суставной поверхности по отношению к другой. Термин «артрокинематика» используется для характеристики движений суставных поверхностей. Обычно одна из суставных поверхностей оказывается более устойчивой, чем другая, и служит основой движения, а другая поверхность перемещается по этой относительно фиксированной основе. Для описания типа движения подвижной части применяются такие термины, как «качение», «скольжение» и «вращение». «Качение» — это движение одной суставной поверхности по другой, подобное перемещению колеса по дороге. В коленном суставе, например, мыщелки бедренной кости катятся по фиксированной поверхности большой берцовой кости. Скольжение, которое является чистым поступательным движением, напоминает движение того же автомобильного колеса, только при резком торможении. Термин «вращение» относится к движению подвижного компонента, схожему с вращением волчка, — это чисто ротационное движение. В локтевом суставе, в частности, во время пронации и супинации предплечья, головка лучевой кости вращается на головке плечевой кости. Тип движения, который наблюдается в конкретном суставе, зависит от формы суставных поверхностей. Большинство суставов имеют либо яйцеобразную форму (овоид), либо форму седла. В яйцеобразных суставах одна поверхность выпуклая, другая — вогнутая (рис. 18.1,а). В седлообразных суставах каждая суставная поверхность одновременно и выпуклая, и вогнутая (рис. 18.1,b).
Рис. 18.1. Яйцеобразные и седлообразные суставы: a — в яйцеобразном суставе одна суставная поверхность является выпуклой, а другая — вогнутой; b — в седлообразном суставе каждая суставная поверхность является и выпуклой, и вогнутой
В яйцеобразных суставах, когда выпуклая суставная поверхность двигается по устойчивой вогнутой поверхности, скольжение выпуклой поверхности идет в направлении, противоположном движению костного рычага (рис. 18.2,а). Если вогнутая поверхность движется по устойчивой выпуклой поверхности, скольжение идет в том же направлении, что и движение костного рычага (рис. 18.2,b).
Рис. 18.2. Движения в яйцеобразных суставах: a — когда выпуклая поверхность движется по фиксированной вогнутой поверхности, она идет в направлении, противоположном движению стержня костного рычага; b — когда вогнутая поверхность движется по фиксированной выпуклой поверхности, она идет в том же направлении, что и остальная часть костного рычага (проксимальная фаланга движется по фиксированной пястной кости)
Скольжение, наблюдаемое между суставными поверхностями, является необходимым компонентом движения в суставе и должно происходить, если сустав функционирует нормально. Если суставной конец кости не может двигаться (скользить) в нужном направлении, то не следует ожидать и перемещения ее дистального конца. * * *
ПРИМЕР 13. Отведение дистального конца плечевой кости должно сопровождаться скольжением вниз (нижнее движение) проксимальной выпуклой головки плечевой кости по вогнутой поверхности суставной ямки; в противном случае подъем дистального конца приведет к травме сустава (рис. 18.3,а). Скольжение головки плечевой кости вверх должно происходить, когда дистальный конец плечевой кости идет обратно в приведение (рис. 18.3,b).
Рис. 18.3. Скольжение суставных поверхностей. Отведение плечевой кости должно сопровождаться скольжением книзу ее головки в суставной ямке (а), приведение — скольжением ее головки кверху (b) * * * Необходимо отметить следующее: для того чтобы при движении костного рычага, суставные поверхности могли свободно двигаться в соответствующем направлении, сустав должен обладать определенной степенью так называемой «игры сустава». Это движение одной суставной поверхности по другой обычно не управляется сознательно, и тестировать его следует при помощи внешней силы. В оптимальной ситуации сустав имеет достаточную степень свободы, чтобы допускать необходимое движение своих суставных поверхностей. Если поддерживающие сустав структуры являются вялыми, степень игры сустава может чрезмерно увеличиться, и сустав станет неустойчивым. Если же суставные структуры слишком жестки, то между суставными поверхностями остается слишком небольшой допуск, соответственно движение костного рычага тоже будет ограничено. Движения суставов обычно являются результатом сочетания скольжения, вращения и качения. Эта комбинация создает не только криволинейное движение, но и подвижные оси движения. Ось вращения в любой отдельной точке движения называется мгновенной осью вращения (МОВ). Наиболее заметны МОВ тогда, когда противоположные суставные поверхности имеют разный размер. В некоторых суставах, таких как плечевой, суставная поверхность подвижной кости больше, чем поверхность устойчивого компонента. В других суставах, таких как пястно-фаланговые и межфаланговые суставы пальцев рук, суставные поверхности движущихся костей меньше, чем поверхность неподвижного компонента. Когда суставная поверхность подвижного компонента больше, чем неподвижного (головка плечевой кости больше, чем суставная ямка лопатки), то чистое движение, такое, как качение, приводит к тому, что более крупный подвижный компонент скатывается с меньшей суставной поверхности еще до того, как движение закончится (рис. 18.4).
Рис. 18.4. Качение и скольжение суставных поверхностей.
Таким образом, комбинированные движения, когда подвижный компонент катится в одном направлении и скользит в противоположном, помогают достичь в суставе большей АД, сохраняя при этом контакт между суставными поверхностями. Другим способом увеличения АД является одновременное движение обоих компонентов. Такие артрокинематические движения суставных поверхностей, как качение и скольжение, обычно не определяются зрительно, и поэтому никогда не описывались в традиционных системах классификации движений суставов. Однако эти движения рассматриваются в модели с 6° свободы, предложенной White и Panjabi. Авторы предположили, что движения в межпозвоночных симфизах (суставы между телами позвонков) выполняются в шести плоскостях, вокруг трех осей. Модель с 6° свободы позволяет более тщательно анализировать и описывать движения суставов. Более крупная головка плечевой кости при чистом качении «выкатывается» из суставной ямки. Головка остается в контакте с суставной ямкой при сочетании качения и скольжения Для всех синовиальных суставов есть некоторое плотно упакованное состояние, при котором суставные поверхности максимально совпадают, связки и капсулы максимально натянуты. Обычно положение плотной упаковки наблюдается в конечной точке АД. В плотно упакованном состоянии сустав обладает наибольшей устойчивостью и сопротивляется силам натяжения, которые стараются вызвать расхождение суставных поверхностей. Для плечелоктевого, коленного и межфаланговых суставов положением плотной упаковки является положение разгибания. В положении свободной упаковки суставные поверхности довольно свободно могут двигаться относительно друг друга. Положение свободной упаковки сустава — это любое положение вне плотной упаковки, хотя этот же термин повсеместно используется для обозначения положения, в котором суставные структуры расслаблены, и полость сустава имеет больший объем, чем в других положениях. В свободно упакованном положении сустав обладает определенной степенью внутренней свободы (игра сустава). Внешнее усилие, например, со стороны врача, может вызывать движение одной суставной поверхности по другой и позволяет, таким образом, оценить степень имеющейся игры сустава. Движения туда-сюда в положении плотной упаковки оказывает благоприятное влияние на питание сустава, так как при каждом сжатии жидкость выдавливается в сустав, а при каждом растягивании впитывается обратно.
18.2. Остеокинематика
Остеокинематика рассматривает не столько движение суставных поверхностей, сколько движение костей. Нормальную АД сустава иногда называют анатомической или физиологической АД, поскольку она относится к количеству движения в суставе, допустимому в пределах его анатомического строения. Степень анатомической амплитуды определяется многими факторами, в частности, формой суставных поверхностей, суставной капсулой, связками, мышечной массой и строением окружающих мышечно-сухожильных и костных компонентов. В некоторых суставах нет костных ограничений движения, и ограничение АД связано только с особенностями мягких тканей. Например, костных ограничителей движения нет в коленном суставе. Другие суставы, кроме ограничений со стороны мягких тканей, имеют еще и выраженные костные ограничения. Например, плече-локтевой сустав ограничен в разгибании (плотно упакованное положение) костным контактом локтевой кости и локтевой ямки плечевой кости. АД считается патологической, если количество движения в суставе выходит за анатомические пределы или, наоборот, оказывается значительно меньшим, чем этими пределами предусмотрено. Когда АД оказывается большей, чем допускается его строением, сустав является гипермобильным. Когда АД оказывается меньшей, чем допускается его строением, сустав является гипомобильным. Гиперподвижность, или гипермобильность сустава, может быть вызвана невозможностью ограничить движение либо со стороны кости, и либо со стороны мягких тканей, что приводит к нестабильности сустава. Гипомобильность может быть связана либо с костными или хрящевыми блоками, либо с неспособностью капсулы, связок или мышц к достаточному удлинению. Одной из причин гипомобильности может быть контрактура — этим термином обозначают укорочение мягких тканей, окружающих сустав. Как гипермобильность, так и гипомобильность могут вызывать совершенно нежелательные последствия, причем не только в отношении пораженных суставов, но и соседних суставных структур.
Глава 19 ОБЩИЕ ЭФФЕКТЫ ЗАБОЛЕВАНИЙ, ТРАВМ И ИММОБИЛИЗАЦИИ
Суставы человеческого организма устроены так, что каждая структура, являющаяся частью сустава, имеет одну или несколько особых функций, которые необходимы для работоспособности сустава в целом. Следовательно, любой процесс, который нарушает функционирование одной из частей сустава, нарушает и функцию всего сустава. Сложные суставы более подвержены травмам, болезням или старению, чем простые суставы. В сложных суставах больше составных частей, соответственно, они больше подвержены износу, чем простые суставы. Кроме того, функция сложных суставов зависит от многих взаимосвязанных факторов. Например, капсуле необходимо вырабатывать синовиальную жидкость, жидкости — иметь соответствующий состав и быть достаточной по количеству для того, чтобы обеспечивать смазку и питание сустава. Гиалиновый хрящ должен быть гладким (обеспечивать легкое перемещение суставных поверхностей) и проницаемым, чтобы получать достаточное питание от внутрисуставной жидкости. Хрящу также необходимо периодически испытывать сжатие и растягивание, которые облегчают движение этой жидкости. Связки и капсулы должны обеспечивать достаточную поддержку в целях стабильности, но при этом быть достаточно гибкими, чтобы сохранять нормальную подвижность. Болезнь. Общие эффекты болезни, травмы, иммобилизации, перегрузки и старения можно предполагать, взяв за основу для анализа нормальное функционирование сустава. Например, если синовиальная мембрана сустава поражена таким заболеванием коллагена, как ревматоидный артрит, можно предположить следующее: поскольку нормальной функцией синовиальной мембраны является выработка синовиальной жидкости, то при этом заболевании изменяется как собственно ее выработка, так и состав. Можно также предположить, что поскольку жидкость изменена, изменяется и характер смазки сустава. Болезненный процесс и изменения структуры сустава, наблюдаемые при ревматоидном артрите, на самом деле гораздо сложнее, чем только изменение синовиальной жидкости, но при этом болезнь все же вызывает изменение как ее состава, так и количества. При другом типе артрита, остеоартрите, который считается системным заболеванием, в фокусе болезнетворного процесса оказывается не столько синовий, сколько хрящи и мягкие ткани. Основываясь на нормальной функции хряща, можно предполагать, что хрящи в суставах, пораженных остеоартритом, будут неспособны выдерживать нормальную нагрузку. И в самом деле, при нагрузке происходит эрозия и расщепление хряща. В результате между суставными поверхностями увеличивается трение, что ведет к дальнейшему усилению процесса эрозии. Травма. В случае травмы, например, такой как разрыв связки, можно предположить, что поддержка сустава будет недостаточной. В примере со столом и непрочным шарниром между ножкой и крышкой стола, результатом неустойчивости конструкции будет ее повреждение и нарушение функции. Если на поврежденную ножку стола положить что-нибудь тяжелое, поверхности шарнира под давлением разойдутся, и ножка может подогнуться. Ранее стабильный шарнир теперь допускает подвижность, и ножка может вихлять из стороны в сторону. Дальнейшее движение может привести к тому, что винты выскочат, или согнутся гвозди, и, в конечном счете, вся нормальная структура окажется нарушенной. В случае со связкой, подобные изменения вызовут аномальное отклонение сустава в сторону порванной связки. В результате другие связки, сухожилия и суставная капсула подвергаются избыточному растяжению и становятся неспособны защитить сустав. Целая сторона сустава подвергается аномальному сжатию при действии веса или движения. В экспериментах на собаках, в которых нестабильность коленного сустава создавалась путем перерезки передней крестообразной связки, вскоре после операции начинали возникать морфологические, биохимические, биомеханические и метаболические изменения в суставном хряще. В дальнейшем, суставной хрящ становился толще, более волокнистым, и в нем начинали обнаруживаться остеофиты. В нем также обнаруживали большее содержание воды, чем в хряще здорового колена, увеличивалось и количество синовиальной жидкости. Более того, происходило резкое ускорение обновления кости и утолщение субхондральной кости. По мнению Van Osch и соавт., нестабильность сустава — это известная причина вторичного остеоартрита, в частности коленного сустава. Иммобилизация (лишение подвижности). В принципе, любой процесс или событие, нарушающее нормальное функционирование отдельной суставной структуры, порождает цепочку событий, которая, в конечном счете, затрагивает все части сустава и окружающие его структуры. Иммобилизация в этом отношении является особенно вредной как для структуры, так и функции сустава. Иммобилизация может быть продиктована внешними условиями: гипс, постельный режим, невесомость, а может быть и собственной реакцией на боль и воспаление. Поврежденный или воспаленный и отекший сустав принимает положение свободной упаковки, при котором давление в суставной полости будет минимизировано. Это положение назовем положением комфорта, потому что в нем уменьшается боль. Каждый сустав имеет положение минимального давления. У коленного и тазобедренного сустава положение комфорта — это сгибание между 30° и 45°, для голеностопного сустава это положение подошвенного сгибания на 15°. Если сустав иммобилизован в положении комфорта на несколько недель, в окружающих мягких тканях развиваются контрактуры. Впоследствии возобновление движений с нормальной амплитудой будет невозможным. Эффекты иммобилизации не ограничиваются окружающими мягкими тканями, они могут оказывать влияние на суставные поверхности и находящиеся под ними кости. Биохимическими и биомеханическими эффектами иммобилизации являются следующие: пролиферация волокнисто-жировой соединительной ткани в полость сустава, слипание складок синовия, атрофия хряща, местный остеопороз, ослабление связок и мест их прикрепления вследствие остеокластической ресорбции кости и волокон Шарпи, уменьшение содержания протеогликана и увеличение содержания воды в суставном хряще. Также происходит потеря ПГ связками, сухожилиями и суставными капсулами. Иммобилизация, в частности, очень вредная для менисков коленного сустава. Например, в эксперименте на собаках с наложением гипса на 4 недели в положении сгибания на 90°, было отмечено снижение экспрессии гена аггрекана и содержания ПГ в менисках; увеличилось содержание воды в тканях. Была также отмечена общая атрофия менисков. В результате структурных изменений в суставах, вызванных иммобилизацией, возникает очевидное уменьшение АД сустава, времени между нагрузкой и повреждением, и способности костно-связочного комплекса к поглощению энергии. Отек или иммобилизация сустава также угнетают и ослабляют окружающие сустав мышцы. Таким образом, сустав теряет способность к нормальному функционированию, и возникает серьезный риск дополнительной травмы. Эффекты продолжительной иммобилизации сведены в табл. 19.1.Таблица 19.1 ИЗМЕНЕНИЕ СТРУКТУРЫ И ФУНКЦИИ СУСТАВОВ ВСЛЕДСТВИЕ ДЛИТЕЛЬНОЙ ИММОБИЛИЗАЦИИ (СНИЖЕНИЕ НАГРУЗОК)
Структура ∙ Изменения Кости ∙ Региональный остеопороз Хрящи ∙ Уменьшение синтетической активности хондроцитов и снижение количества гликозамигликанов и хондроитин сульфата. ∙ Уменьшение содержания протеогликана и увеличение содержания воды. Уменьшение толщины, твердости, проницаемости и способности выдерживать нагрузку Связки ∙ Остеокластическая активность в месте прикрепления связки ослабляет прочность прикрепления. Дезорганизация волокон коллагена и быстрое ухудшение биомеханических и механических свойств. ∙ Уменьшение матричных компонентов Мениски ∙ Уменьшение содержания протеогликанов и экспрессии гена аггрекана. Увеличение содержания воды, атрофия и снижение способности выдерживать нагрузку Сухожилия ∙ Распад белка преобладает над синтезом и ведет к уменьшению содержания коллагена и снижению концентрации поперечных связей. В мышечно-сухожильном соединении возникает атрофия, уменьшается размер фибрилл коллагена Синовий ∙ Пролиферация волокнисто-жировой ткани в полость сустава и образование склеек
Понимание негативных эффектов иммобилизации привело к развитию следующих стратегий для минимизации ее последствий: 1) использования устройств непрерывного пассивного движения (НПД) после операций на суставе; 2) уменьшения продолжительности наложения гипса после переломов и вывихов; 3) разработке динамических шин. НПД — это механическое устройство, выполняющее пассивные повторные движения сустава в определенном диапазоне физиологической АД. В этих устройствах можно контролировать как скорость, так и амплитуду движения. Такие аппараты могут создавать движение в суставе без потенциально опасных компрессионных/растягивающих нагрузок, характерных для активного мышечного сокращения. Перегрузки. При всейвредности иммобилизации следует отметить, что постоянные или повторные нагрузки на суставные поверхности тоже могут иметь негативные последствия. Постоянные нагрузки, такие, которые наблюдаются, например, при продолжительном стоянии, сидении или нахождении в приседе, могут нести в себе риск травмы суставов и поддерживающих их структур. Если структура, находящаяся в состоянии крипа, подвергается постоянной нагрузке, действующей на уже деформированную ткань, то у нее может не хватить времени на восстановление, и в тканях будут образовываться микротрещины, а сама ткань выйдет в диапазон упругости. Если постоянной нагрузке на растяжение подвергать связки, произойдет крип (первичная деформация), а затем, при дальнейшем действии нагрузки в фазе крипа, может возникнуть увеличение их длины, имеющее постоянный характер. Если в той же фазе крипа подвергать постоянным компрессионным нагрузкам хрящи, то в них возникнет постоянная избыточная деформация. Постоянное давление в фокусной точке ведет к отмиранию клеток, что уменьшает проницаемость хряща. Суставы и поддерживающие их структуры, подвергающиеся, повторным нагрузкам, могут быть травмированы и выйти из строя, потому что им не хватает времени на восстановление исходных размеров до начала другого цикла нагрузки, т. е. повторная нагрузка действует на эти структуры, пока они находятся во все еще деформированном состоянии. Травму, получаемую вследствие повторных нагрузок растяжения, действующих на соединительные ткани, можно назвать травмой перегрузки, нарушением вследствие повторного движения, или травмой повторного растяжения. Такие травмы часто наблюдаются у спортсменов, артистов балета, фермеров, музыкантов, некоторых рабочих и офисных работников, причем женщины травмируются чаще, чем мужчины. Вместе с тем причина более частых травм у женщин пока еще является вопросом дальнейшего исследования. Hart и соав. предположили, что могут существовать половые различия в регуляции соединительнотканных структур. Хорошо известно, что гормональный уровень женщин во время беременности и менструального цикла подвержен значительным колебаниям. Исследования сухожилий у крольчих показали, что во время беременности содержание коллагена типа I значительно снижается, а содержание коллагеназы, наоборот, возрастает. Представляется, что гормональные половые рецепторы сухожилий крольчих реагировали на изменение гормонального уровня. При взятии биопсии из сухожилий людей во время операций после травм перегрузки было обнаружено, что в одних сухожилиях идет отчетливый воспалительный процесс, а в других — наблюдаются явные дегенеративные изменения. В свете результатов современных исследований, представляется, что простая усталость ткани не является достаточным и удовлетворительным объяснением причин травм перегрузки, а это значит, что требуются дополнительные исследования для оценки причин, последствий, профилактики и лечения подобных травм.
Резюме
В настоящей главе были представлены элементарные принципы построения сустава, система классификации суставов человека, введение в материалы, из которых состоят суставы и свойства этих материалов, а также последствия заболеваний, иммобилизации и перегрузки суставных структур. Здоровье и сила суставных структур, а соответственно, и их функция зависят от определенного количества сжатия и растяжения. Питание костей и хрящей во многом определяется движениями суставов и мышечными сокращениями. Для питания хрящей нужно движение сустава по полной амплитуде, только в этом случае хрящ получает необходимое для собственной жизни количество питательных веществ. Для того чтобы связки и сухожилие сохраняли и наращивали силу, им тоже нужно определенное количество как нагрузки, так и натяжения. Управляемые нагрузки и движения в ранних стадиях процесса реабилитации стимулируют синтез коллагена и способствуют правильной организации коллагеновых фибрилл. При отсутствии давления и растяжения плотность и прочность костей, наоборот, уменьшается. Таким образом, для сращивания костей при лечении переломов рекомендуются микродвижения и компрессия. Однако в силу недостатков механизмов восстановления хряща и значительной продолжительности процесса восстановления костей, связок и сухожилий, наиболее важным делом является предотвращение травм суставных структур. В последующих главах будут подробно рассматриваться строение и функции всех основных суставов тела. Знание основных элементов нормального строения и функций сустава поможет читателю распознать аномалии функций, проанализировать эффекты, оказываемые как на структуру, так и на функцию сустава травмами, болезнями или старением и по достоинству оценить сложную природу суставов человека, взаимосвязи структуры и функции и необходимость защиты суставов.
Контрольные вопросы
Опишите 1. Строение типичного диартроидального сустава. 2. Тип движения, допустимого в шарнирном суставе и приведите, как минимум, два примера шарнирных суставов. 3. Состав межфибрилльного компонента внеклеточной матрицы в соединительной ткани. 4. Как происходит смазка диартроидальных суставов? 5. Движения костного рычага при движении в яйцеобразном суставе (овоиде). 6. Что означает термин «подошвенная область»?
Объясните 1. Что такое крип, и как он влияет на структуру и функцию? 2. Как влияет на суставные структуры иммобилизация? 3. Что происходит с материалом при гистерезисе? 4. Как может произойти травма перегрузки?
Сравните 1. Структуру и функцию синартрозов и диартрозов. 2. Закрытую и открытую цепь и дайте примеры каждой из них. 3. Состав, свойства и функции связок, сухожилий, хряща и кости. 4. Давление и растяжение. Приведите как минимум один пример с использованием кривой «нагрузка-деформация».
V. СТРУКТУРА И ФУНКЦИИ МЫШЦ
Задачи
После изучения этой главы, читатель должен уметь: Описывать 1. Структуру и функцию сократительной единицы (саркомера). 2. Структуру и функцию функциональной (моторной) единицы. 3. Соединительные ткани мышц. 4. Различные типы мышечных волокон. 5. Как длина волокна и площадь поперечного сечения влияют на экскурсию и силу сокращения. 6. Влияние угла перистости на силу мышечного сокращенияДавать определение 1. Мышечного напряжения, в том числе напряжения активного и пассивного. 2. Активной и пассивной недостаточности. 3. Концентрического, эксцентрического и изометрического мышечного действия. 4. Обратного (реверсивного) действия. 5. Агонистов, антагонистов и синергистов.
Помнить 1. Факторы, влияющие на мышечное сокращение. 2. Характеристики различных типов мышечных волокон. 3. Характеристики моторных единиц. 4. Факторы, влияющие на угловую скорость и вращающий момент. 5. Эффекты иммобилизации.
Различать 1. Односуставные и многосуставные мышцы. 2. Антагонисты, агонисты и синергисты. 3. Активную и пассивную недостаточность. 4. Активное и пассивное напряжение. 5. Концентрическое сокращение от эксцентрического. 6. Нормальное мышечное действие от реверсивного.
Сравнивать 1. Относительное влияние длины волокон и момента плеча рычага при определении вращающего момента сустава. 2. Архитектуру различных мышц, и выдвигать предположения о возможном влиянии архитектуры на функцию мышцы. 3. Развитие напряжения при эксцентрическом и концентрическом сокращении. 4. Изокинетические упражнения с упражнениями с постоянным динамическим внешним сопротивлением. Изоинерционные упражнения с упражнениями с постоянным динамическим внешним сопротивлением. 5. Эффекты иммобилизации при удлиненном и укороченном положении.
Введение
В данной части будут рассматриваться мышцы, их структура и функции: подвижность и устойчивость. Скелетные мышцы, как и суставы, предназначены для того, чтобы отвечать требованиям организма в отношении устойчивости и подвижности. Мышечные силы, как и все остальные силы, действующие на тело, имеют вращательный (подвижность) и поступательный (обычно устойчивость) компоненты. Выполнение функции подвижности мышцами происходит за счет создания или управления движением костного рычага вокруг суставной оси; стабильность обеспечивается за счет сопротивления внешнему движению суставных поверхностей и их сближения. Тело, само по себе, без мышечной деятельности, неспособно ни противостоять силе тяжести, ни создавать движение. Если человеческий скелет без мышц поставить в вертикальное положение, он попросту обрушится. Люди с повреждениями спинного мозга, утратившие в результате травмы мышечную функцию нижних конечностей, не могут ни стоять, ни ходить без посторонней помощи. Суставные структуры у человека с такой травмой не повреждены, но они лишены способности противодействия гравитационным вращающим моментам в положении гравитационной нагрузки. Таким образом, когда травмированный человек хочет встать, или пойти, для стабилизации суставов нижних конечностей должна использоваться внешняя поддержка, играющая роль «распорки». Она замещает некоторые функции неработающих мышц и использует вариант замка, похожего на тот, который применяют в столе со складными ножками. Когда замок защелкнут, он обеспечивает устойчивость сустава, или шарнира. В нормальных условиях скелетная мускулатура создает силы, которые позволяют человеческим суставам легко переходить из плотно упакованного положения в положение свободной упаковки и обратно. Если сустав находится в плотно упакованном состоянии, стабилизирующая роль мышц уменьшается. Не сокращающиеся структуры (связки и суставные капсулы) натягиваются и могут содействовать устойчивости сустава. Однако если сустав находится в свободном положении, мышцы должны выполнять более значимую стабилизирующую функцию, так как пассивные опорные структуры расслаблены, и их способности — обеспечивать устойчивость — снижены. Количество силы, которое мышцы выделяют на поддержание либо стабильности, либо подвижности сустава, есть функция их структуры, сократительной способности и биомеханических характеристик. Для понимания взаимосвязей, определяющих человеческие функции, нам надо исследовать эти факторы. Биомеханические особенности мышечной системы. Основная функция мышц состоит в преобразовании химической энергии в механическую работу или силу. Мышца как физическое тело обладает рядом механических свойств (упругость, вязкость, ползучесть, релаксация), а как живой орган также и биологическими свойствами (возбудимость, сократимость), играющими важную роль при выполнении движений. Упругость мышцы проявляется в напряжении, когда мышца растягивается под действием нагрузки. По мере увеличения нагрузки мышца удлиняется и при этом растет ее напряжение. Отсюда следует: 1) нагрузка растягивает мышцу, удлиняя ее, т. е. для растягивания мышцы необходимо приложить силу; 2) по мере удлинения мышцы ее напряжение увеличивается; следовательно, чтобы вызвать напряжение мышцы (без дополнительного возбуждения), необходимо ее растянуть; 3) приложенная нагрузка определяет величину напряжения мышцы, таким образом, чтобы получить большое напряжение, надо приложить большую нагрузку (сопротивление тяге мышцы) — действие равно противодействию; 4) упругость мышцы нелинейна; следовательно, по мере значительного растягивания одинаковые приращения длины мышцы дают все большие приращения напряжения; 5) при отсутствии нагрузки длина мышцы является наименьшей («свободная длина» мышцы) — нерастянутая мышца не напряжена; 6) в условиях организма длина мышцы больше «свободной длины» и мышца несколько напряжена, т. е. всегда обладает «тонусом» покоя. Таковы особенности упругих свойств невозбужденной мышцы. Вязкость мышцы проявляется в запаздывании деформации мышцы при изменении нагрузки. При меньшей вязкости мышцы изменение ее длины отстает от изменения напряжения как при растягивании мышцы, так и при ее сокращении. В этом случае мышца, хотя и не сразу, но все же возвращается к исходному состоянию. При большей вязкости замедление еще больше и мышца дольше не возвращается к прежнему состоянию — обнаруживается остаточная деформация. При этом неизбежна потеря энергии. Считают, что вязкость мышц увеличивается при быстрых движениях и при значительном возбуждении, т. е. как раз в условиях соревновательной борьбы спортсмена. Однако разогревание мышц при разминке снижает вязкость, уменьшает торможение при сокращении и растягивании мышц. Следовательно, на соревнованиях и тренировках важно для снижения вязкости сохранять в разогретых мышцах тепло. Ползучесть мышцы проявляется в удлинении мышцы со временем, несмотря на то что напряжение ее не изменяется. Это свойство характеризует изменчивость соотношения «длина-напряжение» мышцы, не зависящую непосредственно от ее возбуждения, т. е. от управления мышцей как живым органом. Так, например, нагруженная (напряженная) мышца, имея соответствующую длину; через некоторое время при тех же нагрузке и напряжении может начать увеличиваться. Остаточная деформация, упомянутая выше, тоже может быть рассмотрена как проявление ползучести. Релаксация мышцы проявляется в уменьшении ее напряжения, несмотря на то, что длина ее не изменяется. Релаксация заключается в том, что растянутая мышца, сохраняя длину, постепенно с течением времени уменьшает свое напряжение, расслабляется. Проявления ползучести и релаксации мышцы рассматриваются вне прямой зависимости от ее возбуждения. Для живого организма такой подход чисто условен. Смысл его заключается в том, что даже с позиций механики не следует понимать связь напряжения и длины мышцы как постоянные соотношения. Совокупность механических свойств (упруговязких, ползучести и релаксации) во всевозможных сочетаниях в различных условиях, в сущности, и есть то, что называется эластичностью мышцы. Высокоэластичной мышце свойственны значительная растяжимость, большая жесткость при большом растягивании (нелинейная упругость) и малые потери энергии (небольшая вязкость) при деформациях. И хотя механизм, обеспечивающий названные свойства, еще не полностью объяснен, их проявления очень важно учитывать, при изучении способов повышения эффективности действия мышц в движениях. К биологическим свойствам мышц относят их возбудимость и сократимость. Возбудимость мышцы — ее свойство переходить в состояние возбуждения, которое проявляется в изменении ее напряжения, упругости, вязкости и др. Сократимость мышцы — ее свойство при возбуждении сокращаться, т. е. при той же нагрузке и напряжении изменять длину, укорачиваться. При одном и том же напряжении мышцы и одинаковой нагрузке длина мышцы вследствие возбуждения становится меньше — мышца сокращается. Если уменьшить возбуждение или же увеличить нагрузку, мышца растягивается. Следовательно, изменения длины мышцы — ее сокращение и растягивание (удлинение) — определяются степенью ее возбуждения и величиной нагрузки. Все это говорит о том, что проявление активности (режим работы) мышцы определяется изменением ее длины, либо ее напряжения, либо того и другого одновременно. Различают следующие режимы работы мышцы: • изотонический (напряжение одинаково — изменяется длина мышцы); • изометрический (длина мышцы постоянна — напряжение меняется); • ауксотонический (и длина и напряжение изменяется). В чистом виде в движениях человека изотонический режим работы мышцы не наблюдается, так как всегда имеется сопротивление, изменяющее напряжение. Изометрический режим характерен не для движений, а для статических положений. А в реальных движениях обычно наблюдается ауксотонический режим, когда сокращение и растяжение мышцы сочетаются с увеличением и уменьшением ее напряжения. Механическое действие мышц проявляется как тяга, приложенная к месту их прикрепления. Величина силы тяги мышцы и ее проявление в движениях человека обусловлены рядом причин и зависят от совокупности механических, анатомических и физиологических условий. Основным механическим условием, определяющим тягу мышцы, служит нагрузка. Без нагрузки для мышцы не может быть ее напряжения, не может быть ее силы тяги. Нагрузка может быть представлена весом отягощения, а также его силой инерции и другими силами. Из анатомических условий проявления тяги мышцы надо назвать строение мышцы и ее расположение (в данный момент движения). Физиологический поперечник мышцы определяет суммарную тягу всех волокон с учетом их взаимного расположения. От расположения волокон зависит и величина их упругой деформации при растягивании всей мышцы, а значит, и величина возникающих упругих сил. Расположение мышцы относительно оси сустава и звена в данный момент движения влияет, во-первых, на величину плеча силы, а стало быть, и величину момента силы тяги. При острых (менее 45°) и тупых (более 135°) углах вращающая тяга меньше укрепляющей. Во-вторых, расположение мышцы влияет на направление тяги мышцы. Физиологические условия, определяющие величину тяги мышцы, в основном сводятся к условиям возбуждения мышцы и его изменения, в частности при утомлении. Как известно, от количества возбужденных мионов в основном зависит сила тяги мышцы. Максимальное возбуждение наибольшего количества мионов обеспечивает наибольшую силу тяги мышцы. В связи с утомлением существенно изменяется работоспособность мышцы. Это следует учитывать при биомеханическом исследовании спортивной техники. Чтобы определить результат тяги мышцы, недостаточно установить величину и направление этой тяги. При различных условиях закрепления звеньев одна и та же тяга приводит к неодинаковому результату — разным движениям звеньев в суставе. Поэтому следует помнить, что результат приложения тяги мышцы в кинематической цепи зависит от: а) закрепления звеньев; б) соотношения сил, вызывающих движение, и сил сопротивления; в) начальных условий вращения. При этом в каждом конкретном случае лишь совокупность всех факторов определяет результат работы мышц в целом. Разновидности работы мышц определяются сочетанием изменений их силы тяги и длины. Общеизвестные виды работы мышц (преодолевающая, уступающая и удерживающая) определяются только направлением изменения длины мышцы: укорочением, удлинением, сохранением длины. Для этих трех видов работы (первые два — динамическая, последний — статическая) существует возможность, по меньшей мере, трех вариантов изменения силы тяги мышц по сравнению с изометрическим: его нарастание, уменьшение, сохранение без изменений. Хотя работа мышц и проявляется только через их тягу, разновидности работы различны и результаты тяги в зависимости от конкретных условий очень разнообразны. В результате схематически можно выделить девять типичных разновидностей работы мышц. В приведенной таблице (с. 386) названия разновидностей условные, поскольку в практике не сложилось еще определенной терминологии. Кроме того, не все разновидности одинаково часто встречаются. При сохранении положения тела чаще встречается постоянная фиксация. В движениях наиболее обычны, разгон и торможение. В точных движениях характерно притормаживание. Силовая работа выполняется с напряжениями в движениях «до отказа» и усилением фиксации. При выполнении одного и того же действия могут иметь место смены (иногда неоднократные) разновидностей работы у одной и той же мышцы. Мышцы, влияющие на движения биокинематических цепей, как правило, функционируют не изолированно, а группами. Взаимодействие осуществляется между мышцами внутри групп, а также между группами мышц. В результате рабочие тяги мышц (динамическаяработа) обусловливают выполнение движений, а опорные тяги мышц (статическаяработа) создают необходимые для этого условия. Как известно, через каждый сустав проходит не одна мышца, а несколько. Движение в суставе есть результат группового взаимодействия мышц, проходящих через него. Принято различать два вида взаимодействия мышц — синергизм и антагонизм. Мышцы, которые выполняют общую работу, принимая участие в одном и том же движении, т. е. мышцы, расположенные по одну сторону данной оси сустава, называются синергистами. Мышцы, принимающие участие в различных движениях, противоположных одно другому, называются антагонистами. Необходимо иметь в виду следующие два обстоятельства: во-первых, какого-либо истинного антагонизма в работе мышц нет, так как не только мышцы содружественного (синергического), но и противоположного (антагонистического) действия работают согласованно, совместно обеспечивая выполнение данного движения. Особенно велика роль возбуждения антагонистов в регулировке движения. Посредством точной дозировки напряжения антагонистов регулируется скорость движения и развиваемая при этом результирующая сила, производится торможение движения перед его окончанием, достигается плавный переход движения из одной фазы в другую. В основе точного регулирования противодействия антагонистических мышц лежит автоматически действующий врожденный рефлекс на растягивание: чем больше размах движения, тем больше растягиваются мышцы-антагонисты, тем сильнее раздражаются их проприорецепторы, тем больше возрастает в них рефлекторное напряжение. Этот спинальный рефлекс тонко регулируется высшими отделами центральной нервной системы и дополняется специальными воздействиями центров на мышцы-антагонисты, в соответствии с характером двигательного задания и условиями его выполнения. Во-вторых, необходимо помнить, что синергетические и антагонистические отношения между мышцами не являются постоянными. Функциональная анатомия дает многочисленные примеры того, что многие мышцы изменяют свою функцию с изменением исходного положения и при движении по переходящим осям многоосных суставов. Мышцы, являющиеся для данного движения синергистами, для другого движения могут становиться антагонистами. Изменение характера взаимодействия между мышцами является важным фактором использования сустава со многими степенями свободы, как полносвязного механизма, работающего в направлении той или иной, но определенной степени свободы. Перестройка использования мышц достигается благодаря координирующей работе нервных центров. Распределение усилий в группе мышц данного сустава по ходу движения изменяется. Следует добавить, что практически невозможна совершенно точная дозировка величины тяги каждой мышцы, быстроты нарастания тяги, времени «включения» и «выключения» мышцы. Поэтому всегда в той или иной степени возникают рассогласования тяг мышц, что является одной из главных внутренних помех в управлении движениями. Научиться преодолевать рассогласования тяг мышц очень непросто. Это одна из главных задач при овладении движениями, путь к наибольшей экономичности и точности движений. Механические свойства мышц. Основная функция мышц состоит в преобразовании химической энергии в механическую работу или силу. Главными биомеханическими показателями, характеризующими деятельность мышцы, являются: а) сила, регистрируемая на ее конце (эту силу называют натяжением или силой тяги мышцы)1, и б) скорость изменения длины. При возбуждении мышцы изменяется ее механическое состояние; эти изменения называют сокращением. Оно проявляется в изменении натяжения и (или) длины мышцы, а также других ее механических свойств (упругости, твердости и др.). Механические свойства мышц сложны и зависят от механических свойств элементов, образующих мышцу (мышечные волокна, соединительные образования и т. п.), и состояния мышцы (возбуждения, утомления и пр.). Понять многие из механических свойств мышцы помогает упрощенная модель ее строения — в виде комбинации упругих и сократительных компонентов. Упругие компоненты по механическим свойствам аналогичны пружинам: чтобы их растянуть, нужно приложить силу. Работа силы равна энергии упругой деформации, которая может в следующей фазе движения перейти в механическую работу. Различают: а) параллельные упругие компоненты (ПарК) — соединительнотканные образования, составляющие оболочку мышечных волокон и их пучков, и б) последовательные упругие компоненты (ПосК) — сухожилия мышцы, места перехода миофибрилл в соединительную ткань, а также отдельные участки саркомеров, точная локализация которых в настоящее время неизвестна. Сократительные (контрактильные) компоненты соответствуют тем участкам саркомеров мышцы, где актиновые и миозиновые миофиламенты перекрывают друг друга. В этих участках при возбуждении мышцы происходит механическое взаимодействие между актиновыми и миозиновыми филаментами, приводящее к изменению натяжения и длины мышцы. Поскольку каждая миофибрилла состоит из большого числа (n) последовательно расположенных саркомеров, то величина и скорость изменения длины миофибриллы в два раза больше, чем у одного саркомера. Сила, развиваемая каждым из них, одинакова и равна силе, регистрируемой на конце миофибриллы (подобно тому, как равны силы в каждом из звеньев цепи, к концам которой приложены растягивающие силы). Эти же самые n саркомеров, соединенные параллельно (что соответствует большему числу миофибрилл), дали бы и кратное увеличение в силе, но при этом скорость изменения длины мышцы была бы той же, что и скорость одного саркомера. Поэтому при прочих равных условиях увеличение физиологического поперечника мышцы привело бы к увеличению ее силы, но не изменило бы скорости укорочения, и наоборот, увеличение длины мышцы сказалось бы положительно на скорости сокращения, но не повлияло бы на ее силу. Покоящаяся мышца обладает упругими свойствами: если к ее концу приложена внешняя сила, мышца растягивается, длина увеличивается, а после снятия внешней нагрузки восстанавливает свою исходную длину. Зависимость между величиной нагрузки и удлинением мышцы непропорциональна (не подчиняется закону Гука). Сначала мышца растягивается легко, а затем даже для небольшого удлинения надо прикладывать все большую силу (иногда мышцу в этом отношении сравнивают с вязаными вещами: если растягивать, скажем, трикотажный шарф, то вначале он легко изменяет свою длину, а затем становится практически нерастяжимым). Если мышцу растягивать повторно через небольшие интервалы времени, то ее длина увеличится больше, чем при однократном «содействии». Это свойство мышц широко используется в практике при выполнении упражнений на гибкость (пружинистые движения, повторные махи и т. п.). Длина, которую стремится принять мышца, будучи освобожденной, от всякой нагрузки, называется равновесной (или свободной). При такой длине мышцы ее упругие силы равны нулю. В живом организме длина мышцы всегда несколько больше равновесной и поэтому даже расслабленные мышцы сохраняют некоторое натяжение. При растягивании мышцы больше равновесной длины появляются упругие силы в параллельных, упругих компонентах. Если при длине, превышающей равновесную, мышца сокращается, то сила, которую проявляют контрактильные элементы, складывается с силой упругой деформации ПарК, и суммарная сила тяги мышцы увеличивается. Поэтому при длине выше равновесной, сила мышцы при сокращении больше. Чем больше в мышце соединительнотканных образований, тем раньше при ее растягивании возникают упругие силы ПарК и тем больше их вкладе в суммарное напряжение возбужденной мышцы. Так, например, большинство мышц нижних конечностей, где соединительнотканных образований и перистых мышц с угловым расположением волокон существенно больше. С уменьшением длины мышцы сила ее тяги падает, а сила контрактильных компонентов падает также и при значительном удлинении мышцы. Это происходит потому, что максимальную силу контрактильные компоненты проявляют при наибольшей величине перекрытия активных участков актиномиозиновых филаментов. При уменьшении или увеличении длины мышцы площадь перекрытия и соответственно число поперечных мостиков, образующихся между миозиновыми и актиновыми нитями, уменьшается, соответственно падает и сила. Длину мышцы, при которой сила контрактильных компонентов максимальна, называют длиной покоя. Если к возбужденной мышце, длина которой меньше равновесной, прикладывается большая внешняя сила (например, при постановке ноги на опору в беге), то мышца растягивается, и в ней возникают упругие силы. Так как длина ПарК не превышает при этом равновесной длины, основной вклад в данном случае вносит последовательная упругая компонента (ПосК). Из-за наличия в мышце параллельных и последовательных упругих компонент упругие силы в ней могут возникать при любой ее длине (например, при отталкивании в беге или взятии штанги на грудь, хотя длина мышц-разгибателей ног при этом далека от максимально возможной). Для мышц характерно также такое свойство, как релаксация — снижение силы упругой деформации с течением времени. При отталкивании в прыжках с места сразу после быстрого приседания прыжок будет выше, чем при отталкивании после паузы в низшей точке подседа: после паузы упругие силы, возникшие при быстром приседании, вследствие релаксации не используются. Сила тяги мышцы зависит от совокупности механических, анатомических и физиологических условий. Основным механическим условием, определяющим тягу мышцы, является нагрузка. Без нагрузки на мышцу не может быть ее силы тяги. Нагрузка растягивает мышцу при ее уступающей работе. Против нагрузки мышца выполняет преодолевающую работу. С нарастанием нагрузки сила тяги мышцы увеличивается, но не беспредельно. Нагрузка может быть представлена весом отягощения, а также его силой инерции и другими силами. Большее ускорение отягощения вызывает большую силу инерции. Следовательно, и при не очень большом отягощении, увеличивая его ускорение, можно увеличивать нагрузку, а значит, и силу тяги мышцы. Движение звеньев в кинематической цепи как результат приложения тяги мышцы зависит также от: а) закрепления звеньев; б) соотношения сил, вызывающих движение, и сил сопротивления; в) начальных условий движения. При различных условиях закрепления звеньев в паре одна и та же тяга приводит к неодинаковому результату — разным движениям звеньев в суставе. В биокинематической паре может быть закреплено одно или другое звено, либо оба свободны, либо оба закреплены. Соответственно возникнут ускорения одного из звеньев, либо обоих вместе (встречные движения), либо соединение будет фиксировано. Для двусуставной мышцы, не говоря уже о многосуставных, возможных вариантов намного больше. Наконец, особо важны для эффекта тяги мышцы начальные условия движения — положение звеньев пары и их скорость (направление и величина) в момент приложения силы тяги мышцы. Из анатомических условий проявления тяги мышцы надо назвать строение мышцы и ее расположение (в данный момент движения). Физиологический поперечник мышцы (площадь сечения через все волокна перпендикулярно к их продольным осям) определяет, суммарную тягу всех волокон с учетом их взаимного расположения. От расположения волокон зависит и величина их упругой деформации при растягивании всей мышцы, а значит, и величина возникающих упругих сил. Расположение мышцы в каждый момент движения определяет угол ее тяги относительно костного рычага и величину растягивания, что влияет на величину момента силы тяги мышцы. При углах, отличающихся от прямого, как уже говорилось, кроме вращающей, имеется и укрепляющая составляющая тяги мышцы; с увеличением укрепляющей уменьшается вращающая. Физиологические условия проявления тяги мышцы в основном можно свести к ее возбуждению и утомлению. Эти два фактора отражаются на возможностях мышцы, повышая или снижая ее силу тяги. Величина силы тяги мышцы связана с быстротой ее продольной деформации. С увеличением скорости сокращения мышцы при преодолевающей работе ее сила тяги уменьшается. При уступающей же работе увеличение скорости растягивания мышцы увеличивает ее силу тяги. Это очень важно для оценки силы тяги мышцы при быстрых движениях. В биокинематических цепях действуют те же факторы, определяющие результат тяги каждой мышцы. Но так как в биокинематической цепи все звенья так или иначе взаимосвязаны, то в каждом конкретном случае лишь совокупность всех факторов определяет результат работы мышц в целом. Разновидности работы мышц определяются сочетанием изменений их силы тяги и длины. Виды работы мышц (преодолевающая, уступающая) определяются только характером изменения длины всей мышцы: укорочением, удлинением или же сохранением длины. Для каждого из этих трех случаев существует возможность, по меньшей мере, трех вариантов изменения силы тяги: увеличения, уменьшения или сохранения ее постоянной. Таким образом, схематически можно выделить девять типичных разновидностей работы мышц:Во время сохранения положения тела имеет место постоянная фиксация (5), но могут быть случаи, когда необходимо ее усиление (4) или возможно ослабление (6). Изотонический режим при движениях (2 и 8) практически не встречается. В начале каждого активного движения всегда имеет место разгон, увеличение скорости (3). Прекращение движения работой мышц — следствие их тормозящей работы (7). Последние две разновидности самые распространенные в движениях и заслуживают особого внимания. В физических упражнениях (особенно скоростно-силового характера) уступающая работа одной и той же мышцы переходит в преодолевающую. В этом случае более полно используются силы упругой деформации. В сложных действиях одна и та же мышца может не раз включаться в работу, изменяя при этом ее особенности (разновидности). Хотя работа мышц и проявляется только через их тягу, разновидности работы в зависимости от конкретных условий очень разнообразны.
Глава 20 ЭЛЕМЕНТЫ СТРОЕНИЯ МЫШЦ
В скелетной мускулатуре есть два вида материалов: мышечная (сократительная) и соединительная (не обладающая сократительными свойствами) ткани. Свойства этих тканей и способы их взаимосвязей придают мышцам их уникальные характеристики. Основными свойствами мышечной ткани являются сократимость и возбудимость. Сократимость характеризует способность мышцы к развитию напряжения. Возбудимость — это способность мышцы реагировать на химические, электрические и механические стимулы. Кроме того, мышечная ткань, как и любая другая живая ткань, при пассивной нагрузке демонстрирует вязкоупругие свойства.20.1. Состав мышечного волокна
Скелетная мышца состоит из многих тысяч мышечных волокон. В состав изолированной мышцы входит множество пучков, групп мышечных волокон, окруженных соединительной тканью (рис. 20.1,а). Организация, количество, размер и тип этих волокон может в различных мышцах варьировать, но при этом каждое волокно является отдельной мышечной клеткой, окруженной клеточной мембраной, называемой сарколеммой (рис. 20.1,b). Как и остальные клетки тела, мышечное волокно состоит из цитоплазмы, которая в мышце называется саркоплазма. В саркоплазме находятся структуры, называемые миофибриллами (рис. 20.1,с), являющиеся сократительными структурами мышечного волокна, и не относящиеся к миофибриллам структуры: рибосомы, гликоген и митохондрии, необходимые для клеточного метаболизма. Миофибрилла состоит из толстых и тонких нитей, называемых миофиламентами (рис. 20.1,d).
Рис. 20.1. Состав мышечного волокна: a — группы мышечных волокон образуют связки (пучки); b — мышечное волокно обернуто в клеточную мембрану (сарколемму); с — мышечное волокно содержит структуры (миофибриллы); d — миофибрилла состоит из толстых миозиновых и тонких актиновых миофиламентов
Тонкие миофиламенты состоят из белка актина, толстые — из белка миозина. Взаимодействие этих двух миофиламентов необходимо для сокращения мышцы. Тонкие миофиламенты образованы двумя напоминающими цепочки, перевитыми нитями молекул актина. В выемках между двумя актиновыми нитями находятся компактные молекулы белка тропонина, и к каждой молекуле тропонина прикреплен белок тропомиозин (рис. 20.2,а). Молекулы тропонина и тропомиозина контролируют связь миофиламентов актина и миозина. Толстые миофиламенты состоят из крупных молекул миозина, которые организованы так, что образуют длинные молекулярные нити (рис. 20.2,b).
Рис. 20.2. Миофиламенты: a — молекулы актина показаны на рисунке кружочками. Молекулы тропонина имеют сферическую форму; показано их расположение в выемках между двумя нитями молекул актина. Молекулы тропомиозина тонкие, и лежат вдоль бороздок в актиновых нитях; b — миофиламент миозина с головными группами или шаровидными утолщениями
Диаметр миофиламентов, образованных молекулами миозина, не одинаков по всей их длине, в средней части они шире. Каждая молекула миозина имеет сферические утолщения, называемые головными группами. Головные группы, которые могут поворачиваться, как шарниры, и являются местами связи для прикрепления актина, играют важнейшую роль в сокращении и расслаблении мышцы. Если рассматривать под микроскопом миофибриллу целиком, то видно, что чередование толстых (миозиновых) и тонких (актиновых) миофиламентов, образует отчетливый полосатый паттерн, что хорошо видно на (рис. 20.1,d). Поэтому скелетные мышцы часто называют поперечнополосатыми. Схематическое представление порядка чередования миофиламентов в миофибрилле показано на (рис. 20.3).
Рис. 20.3. Расположение миофибрилл в мышце в состоянии покоя. Саркомер — часть миофибриллы, расположенная между полосами (или линиями) Z. Полоса А саркомера — наложение нитей миозина и актина. Часть полосы А, содержащая только нити миозина, без наложения, называется зоной H. Полоса М, расположенная в центральной части зоны H, содержит поперечно ориентированные нити миозина, соединяющие одну нить миозина с другой. Полоса 1 представлена только волокнами актина
Мышечное волокно состоит также из нескольких структурных белков. Некоторые из этих белков (промежуточные нити) создают как бы структурный каркас для мышечного волокна, а другие (например, десмин) могут участвовать в передаче силы по волокну и к соседним волокнам. Один из белков, титин, играет особо важную роль, сохраняя положение толстой нити при мышечном сокращении и при развитии пассивного напряжения. Титин — это крупный белок, который крепится вдоль толстой нити и заполняет промежуток между толстой нитью и линиями Z (рис. 20.4). Дальнейшее обсуждение титина будет во время рассмотрения взаимосвязи «пассивная длина/напряжение».
Рис. 20.4. Саркомер. Взаимосвязь между титином, толстыми и тонкими нитями
20.2. Единица сокращения
Как видно из рис. 20.3, часть миофибриллы, расположенная между двумя линиями Z, называется саркомером. Линии Z, расположенные по всей миофибрилле с равными интервалами, не только служат границами саркомера, но также связывают нити. Области саркомера, называемые полосами или зонами, помогают идентифицировать расположение толстых и тонких нитей. Часть саркомера, которая захватывает как толстые нити, так и часть тонких нитей, называется анизотропной полосой или полосой А. Области, в которые входят только тонкие нити, называются изотропными, или полосами I. Термины «анизотропный» и «изотропный» относятся к поведению этих частей волокон при освещении. Центральная часть толстой нити (область полосы А), в которой нет наложения толстых и тонких нитей, называется зоной H. Центральная часть зоны H, состоящая из широких средних отделов толстых нитей, называется полосой M. В полосе M небольшие молекулы структурного белка соединяют центральную часть толстой нити с нитью выше или ниже. Взаимодействие между толстыми и тонкими нитями саркомера, ведущее к сокращению мышцы, инициируется приходом нервного импульса к двигательной концевой пластинке, где возникает электрический импульс, или потенциал действия, распространяющийся по мышечному волокну. Потенциал действия инициирует высвобождение ионов кальция, которые вынуждают тропонин перемещать молекулы тропомиозина так, что рецепторные зоны на актине освобождаются, и головные группы миозина могут связываться с актином. Эта связь нитей называется поперечным мостиком, и рассматривается как основная единица активного мышечного напряжения (рис. 20.5).
Рис. 20.5. Образование перекрестного мостика. Головные группы миозина прикрепляются к зонам связи на актине, которые открываются во время сдвига тропомиозина. Тонкие актиновые нити протягиваются вдоль нитей миозина за счет движения головных групп. Хотя на рисунке показаны только два поперечных мостика, во время мышечного сокращения они образуются во многих зонах
Механизм, при помощи которого создается активное напряжение мышцы, назван циклом поперечного мостика. В состоянии покоя поперечные мостики не прикрепляются к тонким нитям. В ответ на поток ионов кальция, вызывающий сдвиги тропомиозина, головная группа миозина прикрепляется к открытой зоне связи на тонкой нити. Миозин обладает высокой степенью притяжения к актину в тонкой нити. Причиной этого является комплекс аденозиндифосфата (АДФ) и неорганического фосфата (Pi), связанный с головной группой. В головной группе миозина содержится фермент (миозин АТФаза), катализирующий гидролиз аденозинтрифосфата (АТФ) на АДФ и Pi. Когда АДФ и Pi высвобождаются из головной группы миозина, головная группа заставляет тонкую нить скользитьпо толстой. В целом это напоминает действие шарнира или вертлюга. После этого действия в головной группе возникает сильное притяжение к АТФ, и последующее соединение АТФ с головной группой опять вызывает выпуск перекрестного мостика. Такой цикл возникновения перекрестных мостиков продолжается до тех пор, пока сохраняются начальный стимул (потенциал действия), подача кальция и снабжение АТФ. Скольжение тонких нитей относительно толстых нитей, сопровождаемое образованием и повторным образованием перекрестных мостиков в каждом саркомере, приводит к укорочению мышечного волокна и генерации напряжения. Мышечное волокно укорачивается (сокращается), если активно укорачивается достаточное количество саркомеров, и если один или оба конца мышцы могут свободно двигаться. Активное укорочение мышцы называется концентрическим сокращением, или сокращением укорочения. По контрасту с сокращением укорочения, при котором тонкие нити тянутся в направлении толстых, мышца может производить эксцентрическое сокращение, или сокращение удлинения. При сокращении удлинения тонкие нити оттягиваются от толстых, перекрестные мостики рвутся и образуются снова, по мере удлинения мышцы. Напряжение в мышце создается, когда происходит повторное образование перекрестных мостиков. Эксцентрические сокращения наблюдаются, когда мышца активно сопротивляется движению, создаваемому внешней силой (такой, как сила тяжести, или, что бывает реже, сила, создаваемая другой мышцей). Если сила, развиваемая в цикле перекрестных мостиков, равна внешней силе, изменения длины мышечного волокна не происходит. Сокращение мышечного волокна без изменения длины называется изометрическим сокращением. Кратко суммируем важные факты, касающиеся мышечного сокращения на уровне саркомера: • напряжение создается при образовании перекрестных мостиков; • инициатором мышечного сокращения является поток ионов кальция; • топливом для цикла поперечных мостиков является гидролиз АТФ; • при концентрическом сокращении тонкие миофиламенты втягиваются в направлении толстых миофиламентов, образуются, рвутся и вновь образуются поперечные мостики; • при эксцентрическом сокращении тонкие миофиламенты оттягиваются от толстых, поперечные мостики рвутся, вновь образуются и опять рвутся; • при изометрическом сокращении длина мышечного волокна является постоянной.
20.3. Единица движения
Хотя саркомер является основной единицей напряжения мышцы, он на самом деле является только частью большого комплекса, называемого двигательной единицей. Стимул, который получает мышца, и который запускает сократительный процесс, передается по нерву, называемому моторным альфа-нейроном (рис. 20.6).
Рис. 20.6. Моторный альфа-нейрон. Тело нейрона показано черной точкой в переднем роге
Тело нейрона находится в переднем роге серого вещества спинного мозга. Аксон идет от тела нейрона к мышце, где он может разделяться как на несколько, так и на тысячи мелких веточек. Каждая из этих веточек заканчивается в двигательной концевой пластинке, находящейся в непосредственной близости к сарколемме отдельного мышечного волокна. Все мышечные волокна, на которых заканчивается веточка аксона, являются частями двигательной (моторной) единицы, в которую также входят тело нейрона и аксон. Нервный импульс, передающийся от тела клетки по аксону к моторной концевой пластинке, вызывает деполяризацию сарколеммы мышечного волокна и генерирует потенциал действия, распространяющийся как по внешней поверхности сарколеммы, так и внутри волокна, по узким трубчатым инвагинациям, которые называются поперечными канальцами (Т-канальцы). Проводниками такого рода в каждом саркомере служат два поперечных канальца, расположенные на уровне соединения полос A и I. Саркоплазматический ретикулум, хранящий большие запасы кальция, состоит из образующих анастомозы мембранных каналов, которые заполняют пространство между миофибриллами и образуют большие мешки (терминальные цистерны) в зонах, где мембранные каналы подходят близко к Т-канальцам. Сочетание двух терминальных цистерн и Т-канальца называется мышечной триадой, соединение между терминальными цистернами и Т-канальцем называется «синаптической ножкой». Когда потенциал действия проходит до Т-канальцев, свободные ионы кальция из саркоплазматического ретикулума высвобождаются в миофибриллы. Вместе с тем точный механизм, при помощи которого потенциал действия в Т-канальцах вызывает выброс кальция из саркоплазматического ретикулума, неизвестен. Высвобождение ионов кальция инициирует образование перекрестных мостиков между актином и миозином и вызывает напряжение мышцы. Когда, после деполяризации, сарколемма становится электрически стабильной, ионы кальция всасываются обратно в саркоплазматический ретикулюм за счет особых белков в мембране саркоплазматического ретикулюма (фермент «активируемая кальцием АТФаза»), и мышечное волокно расслабляется. После разряда моторная единица проходит через латентный и рефракторный периоды, необходимые для восстановления перед повторным циклом деполяризации и напряжения. Таким образом, частота разрядов моторной единицы ограничена необходимостью требующего определенного времени периода восстановления перед повторной активацией. Моторная единица состоит из моторного альфа-нейрона и всех мышечных волокон, которые он иннервирует. Сокращение целой мышцы — это результат асинхронных и повторных разрядов многих моторных единиц. Величина сокращения может меняться за счет изменения количества активируемых моторных единиц или частоты их активации. Количество моторных единиц в мышце, равно, как и их структура, различны, в зависимости от мышцы. Моторные единицы различаются по размеру тела нейрона, диаметру аксона, количеству мышечных волокон и их типу. Каждое такое различие структуры отражается на функции моторной единицы. В некоторых моторных единицах клеточные тела имеют небольшой размер, в других тела нейронов могут быть крупными. Единицы с маленькими клеточными телами имеют аксоны меньшего диаметра. По аксонам с меньшим диаметром нервные импульсы идут дольше, чем по аксонам большого диаметра. Таким образом, в единицах с маленьким диаметром стимулу требуется большее время, чтобы дойти до мышечных волокон. Размер моторной единицы определяется количеством содержащихся в ней мышечных волокон (рис. 20.7).
Рис. 20.7. Размер моторной единицы определяется количеством мышечных волокон, содержащихся в ней. В больших моторных единицах может быть несколько тысяч мышечных волокон, тогда как мелкие единицы могут включать в себя не более трех. Как видно из диаграммы, мышечные единицы, иннервируемые одним и тем же аксоном, не обязательно должны располагаться по соседству
Количество волокон может варьировать от 2–3 до нескольких тысяч. Мышцы, которые либо контролируют тонкие движения, либо используемые для тонкой подстройки, имеют мышечные единицы небольшой величины. Как правило, такие моторные единицы имеют небольшие тела клеток и аксоны малого диаметра. Мышцы, которые должны развивать значительные усилия и производить движения по большой амплитуде, обычно имеют моторные единицы большой величины, с крупными телами нейронов и аксонами большого диаметра. Моторные единицы мелких мышц, таких, как глазодвигательные мышцы, могут включать в себя всего шесть волокон, тогда как моторные единицы икроножной мышцы насчитывают до 2000 волокон. Мышцы с большим содержанием волокон в моторной единице обычно имеют меньшее общее число моторных единиц, чем мышцы, в моторных единицах которых всего несколько волокон. С одной стороны, довольно небольшие моторные единицы платизмы, подкожной мышцы шеи, состоят из примерно 25 мышечных волокон, но общее их количество в мышце — около 1000. Икроножная мышца, с другой стороны, содержит мышечные единицы, в которых порядка 2000 волокон, однако этих единиц в мышце всего около 600. В большинстве случаев в мышцах содержатся смесь из нескольких мелких и крупных моторных единиц. Обычно при желании выполнить какое-либо мышечное действие нервной системой автоматически первыми выбираются моторные единицы с небольшими телами нейронов и малым числом мышечных волокон. Мелкие моторные единицы создают меньшее напряжение, чем крупные и требуют меньших затрат энергии, поэтому считается, что такая стратегия является энергосберегающей. Если задачу способны выполнить несколько мелких моторных единиц, вовлечение в процесс крупных единиц необязательно. Если предъявляемые требования таковы, что только мелкие моторные единицы задачу решить не могут, то в этом случае к процессу привлекаются крупные моторные единицы. Однако стратегия вовлечения различных моторных единиц может быть основана не только на сохранении энергии, но и на предшествующем опыте; характере задачи (насколько быстро должны срабатывать мышцы, или насколько велика должна быть предположительная развиваемая сила); типе мышечного действия (концентрическое, эксцентрическое или изометрическое). Стратегия зависит также от механизма, учитывающего все действия окружающих сустав мышц, в том числе механического преимущества мышцы в конкретной точке амплитуды движения (АД). Также, для решения конкретной задачи, стратегия запуска может подразумевать выбор моторных единиц не одной, а нескольких мышц, окружающих сустав. На модуляцию силы также оказывает влияние частота разрядов моторной единицы. Участие стратегии привлечения или частоты разрядов может быть различным при развитии мышечного усилия, в зависимости от мышцы. Мелкие, дистальные, мышцы больше используют увеличение частоты разрядов, а большие, проксимальные, мышцы отталкиваются в большей степени от привлечения дополнительных моторных единиц. Итак, на напряжение мышцы в целом оказывают влияние следующие факторы: • количество мышечных волокон (влияет на величину реакции на стимул); • диаметр аксона (определяет скорость проведения импульса); • количество моторных единиц, одновременно дающих разряд (влияет на ответ мышцы в целом); • частота разрядов моторной единицы (влияет на ответ мышцы в целом). Кроме этого, на мышечную реакцию будет оказывать влияние тип мышечных волокон, содержащихся в моторной единице. Все волокна в пределах одной единицы однотипны, однако тип мышечных волокон в пределах мышцы может быть разным в различных моторных единицах.
20.4. Структура мышцы
20.4.1. Типы волокон В скелетной мускулатуре человека содержатся, в различных пропорциях, три основных типа мышечных волокон. Они отличаются друг от друга гистохимически, метаболически, морфологически и механически. Так как в разных книгах встречаются разные типы номенклатуры, в табл. 20.1. нами показаны не только характеристики волокон, но и различные названия, используемые для их обозначения.
В настоящем тексте мы будем обозначать три основных типа мышечных волокон следующим образом: тип I (медленные), тип IIA (промежуточные) и тип IIB (быстрые). В данной классификации волокон скелетной мускулатуры человека (которая является наиболее распространенной) за основу различия типов волокон берется активность миофибриллярной АТФазы в разных состояниях ацидоза и алкалоза. Однако при использовании этой схемы обнаруживаются несколько промежуточных типов волокон. В другой схеме применяется реакция мышц на метаболические ферменты. Эта схема классифицирует три основных типа волокон: быстрые гликолитические, быстрые окислительно-гликолитические и медленные окислительные. Эта классификация основана на комбинации реакций клеточных ферментов с субстратами для идентификации активности миофибриллярной АТФазы (быстрая или медленная), активности сукцинатдегидрогеназы (окислительный потенциал) и активности α-глицерофосфат дегидроденазы (гликолитический потенциал). Часто предполагается, что обе схемы взаимозаменяемы, однако это отнюдь не всегда так. В частности в типах IIA и IIB наблюдается значительное взаимное перекрытие метаболической активности. Тот факт, что активность метаболических ферментов зависит от уровня тренированности мышц, говорит за то, что эти схемы не могут являться аналогами. Существует еще одна схема, в которой на основе иммуногистохимического анализа (идентификация частей молекулы миозина с антителами) было обнаружено, что типы I, IIA и IIB соответствуют различным типам молекул миозина (тяжелая цепочка миозина, ТЦМ) — ТЦМ I, ТЦМ IIA и ТЦМ IIB. При использовании любой из схем классификации следует помнить, что на самом деле существует континуум типов волокон с четкими межтиповыми различиями. Каждая скелетная мышца состоит из моторных единиц из всех трех типов волокон, но при этом в одних и тех же мышцах имеются существенные индивидуальные различия в количестве моторных единиц с каждым из типов волокон. Представляется, что индивидуальные различия типов волокон генетически детерминированы. В посмертных исследованиях широкой боковой мышцы, прямой мышцы бедра, дельтовидной мышцы и икроножной мышцы было обнаружено индивидуальное сходство в том плане, что во всех мышцах содержалось примерно по 50 % волокон типа I и II; при этом в мышцах задней поверхности бедра содержалось около 55 % волокон типа II и 45 % волокон типа I. В исследованиях проб биопсии, взятых у молодых испытуемых, в широкой боковой мышце было обнаружено около 54 % волокон типа II и 46 % волокон типа I. Несмотря на то что различия могут показаться мизерными, очевидно, что с возрастом тип волокон изменяется: уменьшается количество и размер волокон типа II. Это, в частности, может объяснять различия, наблюдаемые во многих документированных исследованиях процентного содержания мышечных волокон разных типов. Важно уточнить, что камбаловидная мышца содержит в два раза больше волокон типа I, чем типа II. Мышцы, в которых довольно велико содержание волокон типа I, по сравнению с типом II, такие как камбаловидная мышца, могут работать очень долго, поскольку волокна типа I не подвержены быстрому утомлению. Эти мышцы часто называют мышцами устойчивости, постуральными или тоническими мышцами, поскольку они помогают сохранять устойчивость тела. Довольно мелкие, медленные моторные единицы камбаловидной мышцы (с маленькими клеточными телами, аксонами малого диаметра и небольшим числом волокон в моторной единице) в положении стоя почти постоянно активны и все время выполняют небольшие подстройки мышечного напряжения, требуемые для поддержания равновесия и противодействия влиянию силы тяжести. Мышцы с большим содержанием волокон типа II, такие как двуглавая мышца плеча, иногда называют мышцами подвижности, не постуральными или фазическими мышцами. Эти мышцы участвуют в создании большой АД для костных компонентов. Волокна типа II быстрее отвечают на стимул, но и утомляются скорее, чем волокна типа I. После выполнения серийных нагрузок высокой интенсивности мышцы с высоким содержанием волокон типа II, выдающие мощную начальную реакцию, показывают существенно большие признаки утомления и восстанавливаются медленнее, чем мышцы с высоким содержанием волокон типа I.
20.4.2. Архитектура мышц: размер, организация и длина Во многих мышцах человека быстрые и медленные волокна присутствуют почти в равных пропорциях. Таким образом, определение мышечной функции не должно основываться исключительно только на этой характеристике. Фактически архитектура всей мышцы при определении ее функции может быть много важнее, чем тип волокон. Описание архитектуры скелетной мышцы включает в себя организацию волокон относительно осей силы (перистость), длину мышечных волокон, длину самой мышцы, ее массу и ее физиологическую площадь поперечного сечения (ФППС). Эти структурные вариации влияют не только на форму и размер мышцы в целом, но и на ее функции. Каждое мышечное волокно способно к укорочению примерно до половины своей исходной длины. Соответственно, длинное мышечное волокно, с большим количеством расположенных последовательно саркомеров, способно к укорочению на большее расстояние, чем волокно короткое. Например, мышечное волокно длиной в 6 см, способно укорачиваться на 3 см, а волокно длиной в 4 см — только на 2 см. Значимость этого примера становится очевидной, если понимать, что гипотетическая мышца с длинными волокнами имеет большую экскурсию и может перемещать костный рычаг, к которому она прикреплена, на большее расстояние, чем мышца с короткими волокнами. Однако связь между длиной мышечного волокна и расстоянием, на которое она способна перемещать костный рычаг, не всегда оказывается прямо пропорциональной. Следует учитывать также такие факторы, как организацию мышечных волокон и длину плеча момента (ПМ), которые также влияют на отношение «длина-укорочение». Количество силы, развиваемой мышцей, прямо пропорционально количеству параллельно расположенных саркомеров. Иначе говоря, если волокно увеличивается в размерах (становится больше миофибрилл), или рядом друг с другом уложено больше волокон, способность мышцы развивать усилие возрастает. ФППС является мерой площади поперечного сечения мышцы, перпендикулярного ориентации волокон. Рассчитывают его по нескольким измеряемым архитектурным параметрам. Расположение пучков (групп мышечных волокон), как и длина волокон, варьирует в зависимости от мышцы. Пучки могут быть параллельны продольной оси мышцы (рис. 20.8,a), могут идти по спирали вокруг оси (рис. 20.8,b), или могут располагаться под углом к оси (рис. 20.8,с).
Рис. 20.8. Расположение пучков в мышце: a — параллельное; b — спиральное; c — двуперистое
Мышцы с параллельным расположением волокон (как относительно оси, так и друг друга), называются ленточными или веретенообразными мышцами. В ленточных мышцах, таких как грудино-ключично-сосцевидная мышца, пучки длинные и вытянуты по всей ее длине. Однако в прямых мышцах живота, которые тоже считаются ленточными, пучки разделены на короткие сегменты фиброзными перехватами. В веретенообразных мышцах основная часть мышечных волокон, хоть и не все, вытянуты по длине мышцы. В целом, мышцы с параллельной организацией волокон создают большую АД костного рычага, чем мышцы с перистым расположением и такой же площадью поперечного сечения. Мышцы, волокна которых расположены косо относительно продольной оси, могут называться одноперистыми, двуперистыми или многоперистыми мышцами, поскольку расположение волокон в них напоминает волоски в пере птицы. Волокна, которые составляют пучки в перистых мышцах, обычно короче и многочисленнее, чем волокна во многих ленточных мышцах. В одноперистых мышцах, таких как длинный сгибатель первого пальца кисти, косо расположенные пучки идут только в одну сторону от центрального мышечного сухожилия. В двуперистых мышцах, таких как икроножная, пучки расходятся в обе стороны от центрального сухожилия. В многоперистых мышцах, таких как дельтовидная, косые пучки сходятся к нескольким сухожилиям. Косой угол между мышечными волокнами в перистой мышце нарушает прямую связь между длиной мышечного волокна и расстоянием, на которое эта мышца может переместить костную часть, а также уменьшает количество силы, которое направлено вдоль продольной оси мышцы. Только часть силы перистой мышцы идет на собственно движение костного рычага. По сути, чем под более косым углом расположено волокно относительно продольной оси мышцы, тем меньшее усилие способна эта мышца оказать на сухожилие. Это уменьшение мышечной силы является функцией косинуса угла перистости. Многие мышцы человека в покое имеют угол перистости менее 30°. Таким образом, мышечная сила, действующая на сухожилие, будет уменьшена, как максимум, на 13 % (cos 30° = 0,87). В некоторых новых работах говорится, что при изменении суставного угла, или во время мышечного сокращения угол перистости становится еще более косым, что потенциально влияет на усилие сухожилия даже в большей степени. Это потенциальное уменьшение усилия, действующего на сухожилие, вместе с тем компенсируется тем, что в перистых мышцах обычно содержится большое количество волокон в силу их плотной упаковки, что, в свою очередь, увеличивает ФППС. Таким образом, несмотря на потерю силы, вызываемую перистостью, перистая мышца, такая, как икроножная, способна передавать сухожилию, к которому она крепится, значительное количество силы.
20.5. Соединительные ткани мышц
Мышцы и мышечные волокна, как и другие мягкие ткани тела, окружены и поддерживаются соединительной тканью. Сарколемма отдельных мышечных волокон окружена соединительной тканью, которая называется эндомизий, или внутренний перимизий, а группы мышечных волокон покрыты соединительной тканью, называемой перимизием. Эндомизий и перимизий соединены с наружной соединительной тканью, которая называется эпимизий, и в который «завернута» вся мышца (рис. 20.9).
Рис. 20.9. Соединительная ткань мышц. Схематичный поперечный разрез показывает, как перимизий переходит в наружный слой эпимизия
Продолжение наружной оболочки образует сухожилия, которые прикрепляют каждый конец мышцы к костному компоненту. Сухожилия прикрепляются к костям волокнами Шарпи, которые неразрывно соединены с надкостницей. Другие соединительные ткани, связанные с мышцами, существуют в форме фасций, апоневрозов и оболочек. Фасции могут быть разделены на две зоны: поверхностную и глубокую. Зона поверхностной фасции, состоящая из свободной ткани, находится непосредственно под дермой. Эта зона способствует подвижности кожи, действует как изолятор и может включать в себя кожные мышцы, такие как подкожная мышца шеи. Зона глубокой фасции состоит из компактных и регулярно расположенных коллагеновых волокон. Глубокие фасции прикрепляются к мышцам и костям и могут образовывать тракты, ленты и уздечки. Например, глубокая фасция бедра образует тракт, известный как подвздошно-большеберцовый тракт. Этот тракт передает тягу двух мышц нижних конечностей к костям ноги (рис. 20.10).
Рис. 20.10. Подвздошно-большеберцовый тракт. Вид сбоку на левую нижнюю конечность, на котором показан подвздошнобольшеберцовый тракт глубокой фасции, простирающийся от бугра гребня подвздошной кости к латеральной части колена. Правая стрелка указывает на тягу большой ягодичной мышцы, левая стрелка — на тягу мышцы, напрягающей широкую фасцию
Уздечки образованы локализованными поперечными утолщениями фасций, которые создают петлю, прикрепляющуюся к обоим концам кости (рис. 20.11,а). Туннели, или костно-фиброзные каналы, образованные уздечками, удерживают или предохраняют сухожилия от смещений при мышечной деятельности (рис. 20.11,b).
Рис. 20.11. Уздечка: a — верхние и нижние уздечки показаны в нормальном положении, в котором они образуют туннель для сухожилий, идущих от мышц-разгибателей нижней части ноги; b — если уздечки порваны, или удалены, сухожилия движутся кпереди
Иногда глубокие фасции неотличимы от апоневрозов, которые представляют собой листки плотных, компактных белых коллагеновых волокон, которые непосредственно, или не напрямую прикрепляются к мышцам, фасциям, костям, хрящам и другим мышцам. Апоневрозы распределяют усилия, создаваемые мышцами, между структурами, к которым они прикрепляются. Все соединительные ткани в мышцах взаимосвязаны и составляют их пассивный упругий компонент. Соединительные ткани, которые окружают ткани, плюс сарколемма, эластичный белок титин, и другие структуры (нервы и кровеносные сосуды), образуют параллельный упругий компонент мышц. Когда мышца удлиняется или укорачивается, эти ткани также удлиняются или укорачиваются, поскольку они функционируют параллельно с мышечными сократительными единицами. Например, волокна коллагена в перимизии веретенообразных мышц, когда саркомеры находятся в покое, находятся в расслабленном состоянии, но они напрягаются и натягиваются при увеличении длины саркомера. Когда удлиняется перимизий, он также становится жестче (сопротивление нарастанию удлинения). Повышенное сопротивление перимизия удлинению может предотвращать излишнее растяжение пучков мышечных волокон и может способствовать натяжению сухожилия. Когда саркомеры укорачиваются из состояния покоя, вялые волокна коллагена в параллельном упругом компоненте еще сильнее выгибаются (завиваются). Какое бы напряжение не существовало в коллагене в покое, оно уменьшается при укорочении саркомера. Принимая во внимание множество параллельных упругих компонентов мышц, увеличение или уменьшение пассивного натяжения может существенно влиять на общее натяжение мышцы. Сократительные элементы мышцы и ее сухожилие функционируют последовательно. Это означает, что сухожилие будет натягиваться, когда мышца активно создает натяжение. Если сократительные элементы мышцы активно укорачиваются, они создают тягу, действующую на сухожилие. Тяга должна быть достаточной, чтобы выбрать слабину свободного сухожилия так, чтобы оно могло передавать это тяговое усилие костному рычагу (рис. 20.12).
Рис. 20.12. Последовательные упругие компоненты: a — мышца в расслабленном состоянии, сухожилие свободно (наблюдаются изгибы волокон коллагена). В саркомере, показанном над мышцей, виден минимальный перехлест толстых и тонких нитей, образуется мало поперечных мостиков; b — при активном укорочении мышцы сухожилия натягиваются, и никаких изгибов не наблюдается. В саркомере, показанном над мышцей, видны отчетливые наложения нитей и образование поперечных мостиков
К счастью, такой «провис» сухожилия весьма незначителен (в мышцах человека — около 3 %). Таким образом, большая часть мышечной силы может использоваться для движения костного рычага и не рассеиваться на натягивание сухожилия. Сухожилие также находится в натяжении, когда мышца контролирует или тормозит движение рычага при эксцентрическом сокращении. Натяжение сухожилия ослабевает только тогда, когда мышца полностью расслаблена, и оно находится в относительно укороченном состоянии.
Глава 21 ФУНКЦИИ МЫШЦ
21.1. Напряжение мышц
Самой важной характеристикой мышцы является ее способность развивать напряжение и при помощи силы, созданной этим напряжением, приводить в движение костный рычаг. Напряжение может быть или активным, или пассивным; общее же напряжение, которое может развить мышца, включает в себя как активный, так и пассивный компоненты. Общее напряжение, которое мы обозначили в части I как Fms, является величиной векторной и характеризуется: 1) величиной; 2) двумя точками приложения (в проксимальном и дистальном прикреплении мышцы); 3) линией действия; 4) направлением тяги. Точка приложения, линия действия и направление тяги являлись основной частью обсуждения мышечной силы в части I, однако теперь нам надо обратить внимание на детерминанты компонента, называемого величиной мышечной силы или общим мышечным напряжением. Пассивное напряжение. Пассивное напряжение — это напряжение, развиваемое в пассивных, не сократительных компонентах мышцы. Пассивное напряжение в параллельных упругих компонентах создается за счет удлинения мышцы за границы длины «слабины» тканей. Параллельный упругий компонент может прибавляться к активному напряжению, создаваемому мышцей при ее удлинении, или при укорочении мышцы может оставаться в состоянии «слабины» и никак в общем напряжении не участвовать. Общее напряжение, которое развивается во время активного сокращения мышцы, это комбинация несократительного (пассивного) напряжения и сократительного (активного) напряжения. Активное напряжение. Активное напряжение — это напряжение, развиваемое сократительными элементами мышцы. Активное напряжение в мышце инициируется за счет образования поперечных мостиков и движения тонких и толстых нитей. Количество активного напряжения, которое может генерировать мышца, зависит от нервных факторов и механических свойств мышцы. Нервные факторы могут модулировать такие параметры активного напряжения, как частота разрядов, количество и размер работающих моторных единиц. Механическими свойствами мышцы, определяющими активное напряжение, являются изометрическое отношение «длина-напряжение» и отношение «сила-скорость».
21.1.1. Изометрическое отношение «длина — напряжение» Одной из наиболее фундаментальных концепций в физиологии мышечной деятельности является прямая зависимость между развитием изометрического напряжения в мышечном волокне и длиной саркомеров в нем. Наличие этой связи было и продолжает являться основным доказательством, поддерживающим теорию скольжения нитей (филаментов) при мышечном сокращении. Изометрическое отношение «длина-напряжение» саркомера было определено экспериментальным путем, с использованием изолированных одиночных мышечных волокон в строго контролируемых условиях. Существует оптимальная длина саркомера, при которой мышечное волокно может развивать максимальное изометрическое напряжение (рис. 21.1).
Рис. 21.1. Отношение «длина-напряжение» саркомера скелетной мышцы. Показаны кривые активного, пассивного и общего напряжения. Плато на кривой активного напряжения означает оптимальную длину саркомера, где развивается максимальное активное напряжение. Изометрическое напряжение снижается при удлинении мышцы, так как образуется меньшее количество поперечных мостиков. Напряжение снижается также при укорочении мышцы по причине встречно-штыревого движения тонких нитей. Увеличение пассивного напряжения при удлинении мышцы показано пунктирными линиями. Пассивное и активное напряжение вместе дают общее напряжение, развиваемое мышечным волокном
Мышечные волокна развивают максимальное изометрическое напряжение при оптимальной длине саркомера, потому что тонкие и толстые филаменты располагаются так, что в пределах саркомера может образовываться максимальное количество поперечных мостиков. Если длина мышечного волокна больше или меньше оптимальной, то количество активного напряжения, которое оно способно генерировать, уменьшается (см. рис. 21.1). Если длина мышечного волокна больше оптимальной, то получается меньший перехлест между тонкими и толстыми нитями и, соответственно, имеется меньше возможностей для образования поперечных мостиков. Вместе с тем, если мышца вытянута, может возрастать пассивное упругое напряжение в параллельном компоненте. Это пассивное напряжение добавляется к активному напряжению, давая, в результате, общее напряжение (см. рис. 21.1). Похожая потеря изометрического напряжения или способности к развитию напряжения наблюдается при укорочении мышечного волокна ниже границ оптимальной длины. Когда саркомер короче оптимума, расстояние между полосами Z уменьшается, и происходит так называемое встречно-штыревое действие филаментов. Встречноштыревое положение толстых и тонких нитей может мешать образованию поперечных нитей из молекул миозина, уменьшая тем самым активную силу. Диапазон длины, при которой мышечное волокно может развивать максимальное напряжение, очень мал, и отклонение от оптимальной длины может быть не более 0,2–0,4 μm. Следует помнить, что отношение «длина-напряжение» саркомера определялось при использовании изометрических сокращений, и, таким образом, работает, строго говоря, только при изометрических сокращениях. Кроме того, как мы узнаем далее, полный диапазон удлинения или укорочения саркомера может быть возможным только в экспериментах с изолированной мышцей. Длина саркомера, что совершенно очевидно, изменяется при динамических сокращениях (концентрические и эксцентрические сокращения), тем самым, оказывая влияние на напряжение, развивающееся в мышце. Однако во время динамических сокращений отношение «длина-напряжение» следует комбинировать с отношением «сила-скорость», чтобы определить воздействие на мышечное напряжение, как силы, так и скорости. Применение отношения «длина-напряжение». Применение отношения «длина-напряжение» в целой мышце и, в конечном счете, в мышечно-суставных системах — дело непростое. Например, длина саркомеров неоднородна в пределах одной мышцы, не говоря уже о различиях саркомеров в разных мышцах со схожими функциями. Это означает, что для длины любой отдельной мышцы, при конкретном положении сустава, в ней могут быть саркомеры различной длины, соответствующей разным точкам отношений «длина-напряжение». Кроме этого, когда мышца действует на сустав, создаваемый момент вращения является функцией не только мышечной силы (которая зависит от длины мышцы), но также и функцией плеча момента мышцы. Это значит, что при определенном угле сустава мышца может быть укороченной (развиваемая ей сила будет малой), но плечо момента может быть довольно длинным, что позволяет сохранять крутящий момент. Из таких примеров становится ясно, что если отношение «длина-напряжение» саркомера важно для нашего понимания физиологии мышечной деятельности, то при анализе деятельности систем целых мышц и суставов важны другие факторы. Известно всего несколько экспериментов, в которых пытались определить изометрическое отношение «длина-напряжение» саркомера в целостной мышце. В этих экспериментах на мышцах человеческой кисти и бедра было показано, что разброс длины саркомеров, наблюдаемый при нормальных движениях суставов, очень мал, и все значения близки к оптимальным. Это представляется весьма благоприятным в том плане, что мышца исходно не находится в невыгодном положении в силу излишнего удлинения или укорочения. Одним из эмпирических вариантов применения отношения «длина-напряжение» является наблюдение, свидетельствующее, что в конечных положениях диапазона подвижности сустава способность мышцы к созданию и удержанию изометрического напряжения уменьшается (так называемая активная недостаточность). На уровне саркомера такое состояние может наблюдаться либо когда мышца слишком укорочена, либо потенциально, когда мышца вытянута до такой степени, что в среднем имеется уменьшение перекрытия миофиламентов. С одной стороны, во многих случаях, когда мышцы пересекают сустав, они располагаются вокруг сустава так, что их избыточное вытягивание или укорочение попросту невозможно. С другой стороны, мышцы, которые проходят более, чем через один сустав (двухсуставные или многосуставные мышцы), могут показывать большие изменения длины при движении по полной амплитуде всех суставов, которые они пересекают. При попытке одновременно достичь полной АД во всех суставах, через которые проходит многосуставная мышца, может возникнуть снижение момента вращения. Таким образом, когда многосуставная мышца находится в укороченном состоянии, она не может развить максимального изометрического сокращения. Уменьшение крутящего момента, связанное с изменением длины мышцы, может наблюдаться и в односуставной мышце, хотя подобное встречается не так уж часто. Хотя уменьшение изометрического крутящего момента можно разумно объяснить изменениями длины мышцы, здесь могут существенное значение иметь и другие факторы, такие как изменение плеча момента и пассивное сдерживание со стороны удлиненных антагонистов. Во время движений сустава длина саркомера остается близкой к оптимальной, поэтому эти иные факторы могут оказаться гораздо более важными, чем предполагалось ранее. * * * ПРИМЕР 1. Сгибатели пальца пересекают запястье, пястно-запястный, пястно-фаланговый и межфаланговый суставы (рис. 21.2,а). Когда сгибатели пальца укорачиваются, они вызывают одновременное сгибание во всех суставах, через которые проходят. Если позволить всем суставам согнуться одновременно, то сгибатели пальца станут еще короче и, вероятно, будут развивать меньшее напряжение. В норме, при сокращении сгибателей пальца запястье удерживается в легком разгибании мышцами-разгибателями запястья (рис. 21.2,b). Разгибатели запястья не дают сгибателям пальца согнуть запястье и, таким образом, поддерживается оптимальная длина сгибателей.
Рис. 21.2. Снижение активного напряжения при укорочении мышцы: a — человек пытается сжать кулак, но не может этого сделать, потому что сгибатели пальца укорочены и пересекают как согнутое запястье, так и пальцы. Кроме этого, разгибатели пальцев удлиняются, потенциально ограничивая движение; b — отношение «длина-напряжение» как сгибателей, так и разгибателей улучшено за счет стабилизации запястья в положении небольшого разгибания, соответственно, человек может крепко сжать кулак
21.1.2. Отношение «сила-скорость» Еще одним фактором, который влияет на развитие напряжения в мышце, является скорость внутреннего укорочения миофиламентов. Скорость внутреннего укорочения — скорость, с которой миофиламенты могут скользить друг относительно друга и образовывать и повторно образовывать перекрестные мостики. Отношение «сила-скорость» описывает взаимосвязь между скоростью мышечного сокращения и развиваемой силой, объясняя тем самым, что происходит во время концентрического и эксцентрического мышечного сокращения. На основании экспериментов с изолированной мышцей, отношение «сила-скорость» говорит, что скорость мышечного сокращения — функция от поднимаемого веса, но, с клинической точки зрения, можно говорить и в обратном смысле (генерируемая сила — функция скорости мышечного сокращения, рис. 21.3).
Рис. 21.3. График «сила-скорость» скелетной мышцы. При максимальной скорости укорочения сила не развивается (иначе говоря, максимальной скорости укорочения можно достичь только при полном отсутствии нагрузки на мышцу). При уменьшении скорости укорочения, сила, развиваемая мышцей, увеличивается. При нулевой скорости происходит изометрическое сокращение мышцы. При активном удлинении мышцы сила резко возрастает, а затем достигает плато
Максимальная скорость внутреннего сокращения наблюдается тогда, когда скольжению нет сопротивления, как, например, происходит, если мышечное волокно отделено от костного прикрепления. Однако в такой ситуации (отсутствия максимальной скорости укорочения сила не развивается (иначе говоря, максимальной скорости укорочения можно достичь только при полном отсутствии нагрузки на мышцу). При уменьшении скорости укорочения, сила, развиваемая мышцей, увеличивается. При нулевой скорости происходит изометрическое сокращение мышцы. При активном удлинении мышцы сила резко возрастает, а затем достигает плато сопротивления в мышце) не развивается и напряжение. И наоборот, напряжение может развиваться, когда сопротивление движению костного рычага не позволяет мышце укоротиться, что наблюдается при изометрическом сокращении. При концентрическом сокращении, напряжение в мышце нарастает со снижением скорости укорочения. При изометрическом сокращении скорость укорочения равняется нулю, но напряжение — больше, чем при концентрическом сокращении. При эксцентрическом сокращении, когда увеличивается скорость удлинения, нарастает и напряжение. Эти явления наблюдаются не только в экспериментальных условиях с изолированной мышцей, поднимающей вес, они в определенной степени просматриваются и на целостной мышце, движущей костный рычаг. Ранее мы говорили, что во время динамического сокращения отношение «длина-напряжение» следует комбинировать с отношением «сила-скорость», потому что на развитие мышечного напряжения влияют как длина саркомера, так и скорость сокращения. Нельзя упрощать, допуская, что при укорочении мышцы развиваемое в ней напряжение строго следует изометрическому отношению «длина-напряжение». Например, при высоких скоростях укорочения мышечное напряжение будет низким, несмотря на длину саркомера. Тот факт, что для большинства человеческих движений не характерна постоянная скорость сокращения, еще более усложняет ситуацию, поскольку и при изменении длины, и при изменении скорости будет меняться сила. Итак, влияние на активное напряжение могут оказывать следующие факторы: • напряжение может увеличиваться за счет нарастания частоты разрядов моторных единиц или увеличением количества посылающих импульсы моторных единиц; • напряжение может увеличиваться при помощи втягивания в процесс моторных единиц с большим числом волокон; • чем больше образуется поперечных мостиков, тем больше напряжение; • мышцы с большой физиологической площадью поперечного сечения могут создавать большее напряжение, чем мышцы с небольшим поперечным сечением; • напряжение увеличивается при снижении скорости активного укорочения и нарастании скорости активного удлинения. Это основное понимание двух важнейших механических свойств мышц, отношения «длина-напряжение» и отношения «сила-скорость» может применяться в клинической практике.
21.1.3. Типы мышечного действия Мышечные действия (или сокращения) описываются как сокращение изометрическое (при постоянной длине) или сокращения динамические, которые делятся на концентрическое сокращение (сокращение с укорочением) и эксцентрическое сокращение (с удлинением). Такой термин как «изотоническое сокращение» здесь не применяется, поскольку он относится к равному или постоянному напряжению, которое не является физиологическим. Напряжение, генерируемое в мышце, нельзя контролировать или удерживать все время постоянным. Таким образом, типы мышечных действий, которые будут рассматриваться в данном параграфе, следующие: изометрическое, концентрическое и эксцентрическое. Еще два типа мышечного сокращения, изокинетическое и изоинерционное, будутрассматриваться далее (п. 21.1.5). Ранее концентрическое, изометрическое и эксцентрическое мышечные сокращения рассматривались в связи с движением, происходящим на уровне саркомера. Когда мышца прикреплена к костям, которые могут двигаться свободно, и сила, генерируемая мышцей, может создавать достаточный крутящий момент, чтобы преодолеть нагрузку, то мышца будет выполнять концентрическое сокращение, или сокращение укорочения, и будет тянуть обе кости по направлению друг к другу и к центру мышцы (рис. 21.4).
Рис. 21.4. Концентрическое сокращение мышцы. Когда мышца развивает напряжение, она передает тягу на оба своих костных прикрепления
Обычно во время функциональной деятельности, одно прикрепление мышцы стабилизировано, а другое — может двигаться свободно. Если фиксировано проксимальное прикрепление, но свободно дистальное, мышца будет тянуть дистальный компонент кости (рис. 21.5,а) по направлению к проксимальной части. При фиксации дистальной части, но свободном проксимальном компоненте (рис. 21.5,b), тяга будет осуществляться по направлению к дистальной части.
Рис. 21.5. Обычное и реверсивное действие при концентрическом сокращении: a — движение свободного дистального рычага происходит при фиксированном проксимальном рычаге, и крутящий момент мышечной силы (Осм) достаточен для преодоления крутящего момента гравитационного сопротивления; b — при реверсивном действии происходит движение проксимального костного рычага, если дистальный конец кости фиксирован
Во время концентрического сокращения мышца выполняет работу по перемещению костного рычага на некоторое расстояние в направлении мышечной тяги. Формула такой работы: W = F х d. Если фиксированы как дистальный, так и проксимальный прикрепления мышцы, и крутящий момент, создаваемый мышцей, равен крутящему моменту сопротивления, то видимая длина мышцы остается неизменной, хотя на уровне миофибрилл наблюдается укорочение. При отсутствии видимых изменений суставного угла, такое мышечное действие называется изометрическим сокращением (рис. 21.6).
Рис. 21.6. Изометрическое сокращение. Фиксированы как дистальный, так и проксимальный костные рычаги, и когда мышца развивает активное напряжение, никакого видимого движения не наблюдается
При изометрическом сокращении механической работы не выполняется, поскольку сила (F) не перемещает рычаг на какое-либо расстояние (d). Понятие расстояния при изометрическом сокращении попросту отсутствует, поскольку оба костных компонента фиксированы, и во время сокращения ни один из них не движется. Однако на цикл создания поперечных мостиков при этом расходуется энергия. Когда сила мышцы и создаваемый ей момент вращения слишком малы для преодоления противодействующего крутящего момента рычага, мышца будет удлиняться, и здесь ее сокращение будет эксцентрическим. При таком сокращении мышца действует как тормоз, пытаясь контролировать движение костного компонента во время ходы рычага в направлении, противоположном ее тяге. Когда рука, держащая стакан, движется в направлении от лица к столу, мышцы-сгибатели локтевого сустава выполняют эксцентрическое сокращение, контролируя опускание руки, вызванное силой тяжести. При таком действии концы мышц движутся в противоположных направлениях, т. е. расходятся (рис. 21.7).
Рис. 21.7. Эксцентрическое сокращение. Мышца удлиняется, продолжая создавать активное напряжение
Мышца оказывает сопротивление гравитации, при этом, в сегменте предплечье/ кисть, движущемся вокруг локтевого сустава, создается рычаг второго рода. Эксцентрическое мышечное действие, подобно концентрическому, может происходить как движение либо дистального, либо проксимального костного рычага. Механическая работа, выполняемая мышцей во время эксцентрического сокращения, называется отрицательной, поскольку выполняется она не столько собственно мышцей, сколько относительно нее. Расход энергии при эксцентрическом сокращении значительно меньше (при условии использования равных нагрузок), чем при концентрическом, поскольку здесь активируется гораздо меньшее количество двигательных единиц. Напряжение, которое может развиваться в мышце, варьирует в зависимости от типа сокращения. При изометрическом сокращении, развиваемое напряжение больше, чем при концентрическом. В целом, напряжение, развиваемое при эксцентрическом сокращении, может быть больше, чем при изометрическом. Однако эти взаимоотношения не могут рассматриваться как единственно правильные для всех мышц и во всех точках АД. Причиной большего напряжения при эксцентрическом сокращении, чем при концентрическом может быть связан, в какой-то части, с механическими факторами при прикреплении и откреплении поперечных мостиков, или с изменениями нервной активации мышцы.
21.1.4. Угловая скорость и крутящий момент Скорость — величина векторная, она, кроме величины, имеет направление. Когда предмет движется по линейной траектории в определенном направлении, скорость его можно рассчитать, определив расстояние, которое он прошел за определенный период времени. Иначе говоря, скорость — это показатель изменения положения в пространстве. Когда предмет совершает вращательное движение, такое, как мы наблюдаем при движении костного компонента вокруг оси сустава, показатель изменения положения костного компонента называют круговой или угловой скоростью. Угловая скорость, которую развивает костный рычаг при динамическом мышечном сокращении (эксцентрическом или концентрическом) — функция величины чистого крутящего момента, прикладываемого к рычагу. Если общая мышечная сила (Осм) и сила тяжести или внешняя нагрузка (Fext), либо обе они действуют в противоположных направлениях (что обычно и происходит), то чистый крутящий момент (ЧКМ) можно определить при помощи следующего уравнения: ЧКМ = (ОСм x MA) — (Fext х MA). Однако если внимательно рассмотреть компоненты и субкомпоненты формулы, это уравнение представляется слишком упрощенным. Этими компонентами и субкомпонентами являются: I. Крутящий момент мышцы А. Общее мышечное напряжение (ОСм). 1. Активное напряжение: а) число вовлеченных двигательных единиц; б) тип волокон участвующих двигательных единиц; в) тип выполняемого сокращения; г) частота разрядов двигательных единиц. 2. Пассивное упругое напряжение: а) параллельное упругое напряжение; б) последовательное упругое напряжение. Б. ПМ (плечо момента) мышцы II. Крутящий момент внешней силы. А. Величина силы тяжести и/или внешней силы (R) Б. ПМ (плечомомента) гравитационной или внешней нагрузки Заметим, что как в упрощенной, так и в концептуально расширенной формуле положительным чистым моментом — концентрическое сокращение, отрицательным чистым моментом будет эксцентрическое сокращение, а нулевым чистым моментом — сокращение изометрическое. Изменение любого из вышеприведенных компонентов может и будет изменять результат формулы, а соответственно, и величину или направление чистого крутящего момента и угловой скорости. Во время обычной деятельности многие, а иногда все, компоненты изменяются одновременно. Влияние изменения одного компонента или субкомпонента можно определить при условии постоянства других компонентов. Далее, когда мы станем в качестве исходной точки отсчета использовать эту формулу, будет единовременно изменяться только один из факторов. Компонент активного напряжения в общем напряжении мышцы в большой степени находится под волевым контролем человека, хоть и в некоторых границах физиологических ограничений (скорость проведения по аксону, скорость укорочения саркомеров). При увеличении числа вовлеченных двигательных единиц или частоты их разрядов, общая генерируемая мышцей сила может увеличиваться. Увеличение мышечной силы увеличивает чистый момент и угловую скорость, что предполагает концентрическое сокращение. Если требуется более медленное движение, человек может уменьшить число вовлекаемых двигательных единиц и частоту разрядов, что уменьшает как силу мышцы, так и чистый крутящий момент. Если движение вообще нежелательно, как при изометрическом сокращении, силу, создаваемую мышцей, можно уменьшать, вплоть до достижения равновесия мышечного крутящего момента с гравитационным, или моментом, создаваемым нагрузкой. Если человек хочет переместить вес вниз, причем контролируя это (эксцентрическое сокращение), мышечную силу можно минимизировать так, что момент внешней нагрузки будет больше момента, создаваемого мышцей. В этом случае ЧКМ будет иметь отрицательное значение, указывая на то, что направление угловой скорости противоположно направлению мышечной тяги. Чем больше будет отрицательный ЧКМ, тем быстрее будет двигаться конечность, преодолевая мышечное сопротивление. Когда величина нагрузки, действующей на костный рычаг, увеличивается во время концентрического сокращения, увеличивается крутящий момент внешней силы, и если остальные факторы остаются без изменения, ЧКМ и угловая скорость уменьшаются. Уменьшение нагрузки снижает крутящий момент внешней силы и вызывает прирост угловой скорости. Если величина внешней силы увеличивается до такой точки, где ее момент сравнивается с моментом, создаваемым мышцей, то величина ЧКМ станет равна нулю, и сокращение превратится в изометрическое. Когда внешний крутящий момент начинает превышать момент мышечной силы, мышца переходит к эксцентрическому сокращению. В любом из случаев преобладания мышечной или внешней силы меняются еще ПМ (плечи моментов), поскольку рычаг движется, а плечо момента зависимо от его положения в пространстве. ПМ мышцы и ПМ внешней нагрузки могут меняться в одинаковом направлении (в сторону увеличения или уменьшения) или, наоборот, в противоположных направлениях. Только по этой причине ЧКМ движущегося рычага будет переменным, даже если все остальные компоненты останутся постоянными. Если надо сохранять постоянную скорость, меняющиеся ПМ будут требовать постоянной подстройки активного мышечного напряжения. Должно изменяться активное напряжение, поскольку пассивное мышечное напряжение не находится под волевым управлением. Хотя изменение позиции сустава будет влиять на ПМ как мышечной, так и внешней силы, мышечная сила будет также находиться под воздействием изменений длины мышцы, сопутствующих движению сустава. Изменение длины мышцы изменяет доли участия как активного, так и пассивного напряжения. Фактическая угловая скорость, развиваемая рычагом, находится под влиянием многих постоянно меняющихся переменных. Соответственно, изменения скорости рычага по мере его прохождения в пределах АД являются общими.
21.1.5. Мышечная деятельность в управляемых условиях Изокинетические упражнения и тестирование. Одним из достижений технологического прогресса стала разработка оборудования для тестирования и упражнений, позволяющего производить манипуляции и контролировать некоторые переменные, влияющие на мышечную функцию. При изокинетических упражнениях и тестировании, или изокинетическом мышечном сокращении, угловая скорость костного компонента устанавливается заранее и сохраняется неизменной по всей АД сустава при помощи механического устройства. Понятие «изокинетическое сокращение» может быть не столько собственно мышечным действием, сколько заданной переменной. Для сохранения постоянной скорости, сопротивление, создаваемое изокинетическим устройством, прямо пропорционально крутящему моменту, создаваемому мышцей во всех точках АД. Таким образом, когда крутящий момент мышцы увеличивается, пропорционально увеличивается и крутящий момент сопротивления. Контроль сопротивления можно выполнять механически, при помощи изокинетических устройств, таких как Biodex, Cybex, KIN-COM, Orthotron и т. п. Опытные исследователи функций человека могут попытаться контролировать угловую скорость костного компонента вручную, оказывая сопротивление, пропорциональное крутящему моменту мышцы, по всей АД. При ручном тестировании мышцы исследователь может вручную оказывать сопротивление концентрическому сокращению мышц пациента по всей АД. Исследователь должен постоянно подстраивать свое сопротивление так, чтобы оно было пропорциональным крутящему моменту мышцы в любой точке АД. Если исследователь успешно уравновешивает крутящий момент исследуемого, достигается постоянная угловая скорость. Однако ручной контроль угловой скорости и соответствующая подстройка сопротивления не могут иметь ту же степень точности, какую дают механические устройства. Более того, количественная оценка ручного сопротивления гораздо менее точна, чем механического. Преимуществом изокинетических упражнений над свободным подъемом тяжести по всей АД является то, что изокинетическая нагрузка приспосабливается к изменениям крутящих моментов, создаваемым мышцей на протяжении всего движения. Как только достигается заранее заданная скорость, изокинетическое устройство создает сопротивление, пропорциональное крутящему моменту мышцы во всех точках АД. Например, наименьшее сопротивление будет оказываться устройством в той точке АД, где мышца обладает наименьшей способностью к созданию крутящего момента. И наоборот, там, где мышца обладает наибольшей способностью, сопротивление также будет наибольшим. Максимальные изокинетические крутящие моменты при концентрических сокращениях, наблюдаемые при высоких угловых скоростях, ниже этих же показателей, регистрируемых при низких угловых скоростях. Такое снижение крутящего момента при увеличении скорости сокращения является вполне ожидаемым и основанным на отношении «сила-скорость». Фактически значения изометрических крутящих моментов выше, чем изокинетических концентрических КМ при любой скорости и в любой точке АД. Таким образом, чем ближе угловая скорость изокинетического концентрического сокращения к нулю, тем выше изокинетический КМ. Изокинетическое оборудование широко используется для определения значений крутящего момента, который мышца может создавать при разных скоростях, для силовой тренировки, а также для сравнения относительной силы разных групп мышц. Некоторые изокинетические устройства дают возможность проводить количественное определение при тестировании эксцентрического мышечного КМ. При сравнении изометрического и изокинетического тестирования силы мышц спины и рук во время подъема тяжестей, были обнаружены значительные различия между пиковыми изометрическими и изокине тическими силовыми возможностями мышц на протяжении всего расстояния подъема. Было выявлено, что изометрическая сила значительно выше силы изокинетического мышечного концентрического сокращения, и что изокинетичееская сила уменьшается при увеличении скорости подъема. Нормальный повседневный подъем тяжестей никогда не делается в изокинетическом режиме, поэтому изокинетическое тестирование или упражнения, например, для тренировки силы в тяжелой атлетике, и для решения ряда других задач могут быть неприемлемыми, однако — это область концентрации усилий в современных исследованиях. В частности, в ряде работ говорится, что изокинетическое тестирование или упражнения могут дифференцировать результативность при ряде функциональных задач, или могут расширять тренировочный эффект; некоторые работы это отрицают. Изоинерционные упражнения и тестирование. Изоинерционные тесты и упражнения были разработаны для количественной оценки динамической мышечной работы. Изоинерционное мышечное действие определяется как такой тип мышечной деятельности, при котором мышцы преодолевают постоянную нагрузку или сопротивление, а измеряемый крутящий момент определяется в момент ускорения или замедления нагрузки. Считается, что, с точки зрения имитации, это ближе к функциональной деятельности системы «мышца-сустав», чем изокинетические упражнения и нагрузки. Если крутящий момент, создаваемый мышцей, равен моменту сопротивления, сокращение мышцы является изометрическим. Если момент, создаваемый мышцей, больше сопротивления, то мышца укорачивается, и сокращение является концентрическим. И наоборот, если момент, создаваемый мышцей, меньше, чем момент сопротивления, сокращение мышцы будет эксцентрическим. Изоинерционная мышечная деятельность похожа на нормальную работу мышц, при которой изометрические и либо ускоряющиеся, либо замедляющиеся сокращения используются в ответ на постоянную нагрузку. * * *
ПРИМЕР 2. Когда человек начинает поднимать постоянный вес (внешняя нагрузка), инерцию груза должны преодолевать выполняющие подъем мышцы. В начальный момент подъема мышцы выполняют изометрическое сокращение, пытаясь развить момент, необходимый для соответствия инерционному сопротивлению. Как только инерционное сопротивление преодолевается, мышцы переходят к концентрическому сокращению, крутящий мышечный момент увеличивается, и вес начинает двигаться (ускорение). Во время движения может понадобиться эксцентрическое сокращение антагонистов «поднимающих» мышц для замедления скорости подъема.* * * Преимущества как изокинетических, так и изоинерционных устройств в том, что с их помощью можно проводить количественную оценку мышечной активности. Основным вопросом здесь является следующий: с какой степенью точности каждый из методов тестирования может определять уровень мышечной эффективности тестируемого человека? Пока что ответ выглядит так: с помощью обоих методов можно установить разницу между теми, кто может выполнить функциональную задачу, и теми, кто ее неспособен выполнить, учитывая к тому же, что любое такое тестирование зависит от заданной постановки двигательной задачи. Итоговый обзор факторов, влияющих на активное мышечное напряжение. Активное мышечное напряжение является одним из компонентов общего мышечного напряжения, а общее мышечное напряжение — одним из компонентов способности мышцы к перемещению костного рычага. Активное напряжение, однако, является наиболее вариабельным компонентом общего мышечного напряжения. На то, насколько быстро мышца может развивать максимальное напряжение, влияют следующие факторы: • порядок задействования двигательных единиц. Первыми обычно задействуются единицы с низкими скоростями проведения; • тип мышечных волокон в моторных единицах. Единицы с волокнами типа II могут развивать максимальное напряжение быстрее, чем единицы с волокнами типа I; скорость образования поперечных мостиков, их разрыва и повторного образования могут меняться; • длина мышечных волокон. Длинные волокна обладают большей скоростью укорочения, чем короткие. На величину активного напряжения влияют следующие факторы: • размеры моторных единиц. Более крупные единицы создают большее напряжение; • количество и размер мышечных волокон в площади поперечного сечения мышцы. Чем больше площадь поперечного сечения, тем большее напряжение может создать мышца; • количество выдающих разряды моторных единиц. Чем большее количество единиц выдает разряд, тем выше напряжение; • частота разрядов моторных единиц. Чем частота разрядов выше, тем больше напряжение; • длина саркомера. Чем ближе его длина к оптимальной, тем большее изометрическое напряжение может быть создано; • организация волокон. Перистое расположение волокон дает большее их количество, соответственно, в перистой мышце развивается большее напряжение, чем в мышце с параллельной организацией; • тип мышечного сокращения. При изометрическом сокращении развивается большее напряжение, чем при концентрическом сокращении; напряжение при эксцентрическом сокращении может оказаться выше, чем при изометрическом; • скорость. При увеличении скорости сокращения при концентрическом сокращении, напряжение уменьшается. При увеличении скорости удлинения при эксцентрическом сокращении напряжение увеличивается.
21.2. Классификация мышц
Отдельные мышцы могут быть названы по их форме (ромбовидные, дельтовидные мышцы), по местонахождению (двуглавая мышца плеча или передняя большеберцовая мышца), либо по комбинации расположения и функции (длинный разгибатель пальца или короткий сгибатель пальца). Группы мышц разбиваются на категории на основании выполняемого ими действия или определенной роли, которую они играют во время определенных действий. Если мышцы классифицируются по действиям, то мышцы, вызывающие сгибание сустава, называются сгибателями. Мышцы, вызывающие разгибание или ротацию, называются разгибателями или, соответственно, ротаторами. Если мышцы классифицируются по их роли, то отдельные мышцы или мышечные группы описываются в терминах, указывающих на их специфическую роль, которую они играют во время действия. При использовании такого типа ролевого обозначения выполняемое действие (сгибание, разгибание) никакого значения не имеет, во внимание принимается только роль, которую играет мышца. Термин «первичный двигатель» (агонист) используется для обозначения мышцы, роль которой состоит в том, чтобы создать желательное движение сустава. Если желательным действием является сгибание, первичными двигателями будут сгибатели, а мышцы, которые выполняют действие прямо противоположное желаемому движению (разгибатели), называют антагонистами. Антагонисты не обязательно противодействуют желаемому движению, но потенциально могут это сделать. Обычно, когда агонисту требуется выполнить желаемое движение, антагонисты находятся в состоянии торможения (реципропное торможение). Если, однако, агонист и потенциальный антагонист сокращаются одновременно, происходит так называемое совместное сокращение (рис. 21.8).
Рис. 21.8. Совместное сокращение агониста и антагониста
Совместное сокращение мышц вокруг сустава может помочь в создании стабильности и представляет собой форму синергии, которая, в некоторых ситуациях, может оказаться необходимой. Совместное сокращение мышц с противоположными функциями может оказаться нежелательным, если желаемое движение блокируется непроизвольным сокращением антагонистов. Подобное наблюдается при заболеваниях с нарушениями контроля мышечной функции. Мышцы, которые помогают агонистам в совершении желаемого действия, называются синергистами. * * *
ПРИМЕР 3. Если желательным действием является сгибание лучезапястного сустава, то лучевой сгибатель запястья и локтевой сгибатель запястья будут «агонистами», или «первичными двигателями», так как они вызывают сгибание. Сгибатели пальцев являются синергистами, поскольку могут непосредственно помогать сгибателям запястья. Разгибатели запястья являются потенциальными антагонистами.* * * Синергисты могут содействовать агонистам в выполнении желательного действия непосредственно, как в приведенном выше примере, или косвенно, либо за счет стабилизации какой-либо части, либо за счет предотвращения нежелательного действия. * * *
ПРИМЕР 4. Если желательным действием является сгибание пальца, такое, как мы наблюдаем при сжатии кулака, сгибатели пальцев, которые проходят через как лучезапястный сустав, так и пальцы, не могут действовать эффективно (кулак крепко не сжать), если они будут одновременно сгибать пальцы и лучезапястный сустав. Таким образом, стабилизирующие запястье разгибатели действуют в качестве синергистов и блокируют нежелательное сгибание запястья. Предотвращая сгибание в лучезапястном суставе, синергисты могут удерживать сустав в положении, позволяющем сгибателям пальцев развить максимальный крутящий момент, т. е. создать положения для оптимизации длины саркомера и плеча момента.* * * Иногда синергическое действие двух мышц необходимо для того, чтобы вызвать чистое движение, такое, как радиальное отклонение (отведение) запястья. Лучевой сгибатель, действующий в одиночку, вызывает сгибание запястья и радиальное отклонение. Лучевые разгибатели (короткий и длинный) запястья, действующие сами по себе, вызывают разгибание запястья и лучевое отклонение. Если сгибатель и разгибатель запястья действуют вместе как первичные двигатели, то сгибание запястья блокируется или нейтрализуется разгибателем, и в результате возникает чистое движение радиального отклонения (рис. 21.9).
Рис. 21.9. Действия мышц-синергистов. Когда лучевой разгибатель запястья и лучевой сгибатель запястья действуют синергически, они вызывают радиальное отклонение запястья
В данном примере, мышцами, являющимися потенциальными антагонистами желательного движения, являются разгибатель запястья и сгибатель с локтевой стороны запястья (локтевой разгибатель запястья и локтевой сгибатель запястья соответственно). Классификация мышц по функциональным категориям, таким как сгибатели и разгибатели, или агонисты и антагонисты, помогает упростить задачу описания множества разных мышц и объяснения их действий. Однако мышцы могут меняться ролями. Потенциальные антагонисты в одном случае могут в другой ситуации оказываться синергистами. Несмотря на такую очевидную смену роли, мышцы со схожими функциями имеют похожие архитектурные характеристики. Это может показаться очевидным, поскольку мышечная архитектура играет важнейшую роль при определении потенциальной силы и скорости мышечного сокращения. Однако реальная схожесть архитектуры функциональных групп мышц была научно подтверждена только в недавнее время. Примеры этого можно видеть в результатах экспериментов, как на животных, так и на людях. Так, разгибатели колена имеют короткие волокна и большую ФППС, в отличие от сгибателей колена, которые имеют длинные волокна и меньшую ФППС. Подошвенные сгибатели голеностопного сустава обычно имеют короткие волокна и большую ФППС, что отличает их от тыльных сгибателей, имеющих длинные волокна и меньшую ФППС. В верхних конечностях сгибатели пальцев имеют большую длину волокон и большую ФППС, в отличие от более коротких волокон и меньшей ФППС разгибателей (рис. 21.10, 21.11).
Рис. 21.10. Связь между ФППС и длиной волокон в избранных мышцах нижней конечности. Отметим общую группировку мышц со схожими функциями. Например, камбаловидная мышца (КМ) и средняя часть икроножной мышцы (СИМ); передняя большеберцовая мышца (ПБМ) и длинный разгибатель пальцев (ДРП); широкая латеральная мышца, широкая внутренняя мышца и широкая промежуточная мышца (ЛМ, ВМ, ПМ). (Заметим: данные приводятся только для длины волокон короткой головки двуглавой мышцы бедра, BF.) [Lieber R.L. Skeletal Muscle Structure and Function. Implications for Rehabilitation and Sports Medicine. С разрешения издательства Williams & Wilkins, Baltimore 1992]
Рис. 21.11. Связь между ФППС и длиной волокон избранных мышц верхней конечности. Отметим общую группировку мышц со схожими функциями. Например: поверхностные и глубокие сгибатели пальцев (FDS и FDP); короткий лучевой разгибатель запястья (ECRB), локтевой разгибатель запястья (ECU) и разгибатель пальцев (ED); отдельные сгибатели и разгибатели пальцев. [Lieber R.L. Skeletal Muscle Structure and Function. Implications for Rehabilitation and Sports Medicine. С разрешения издательства Williams & Wilkins, Baltimore 1992]
Ориентация мышц относительно сустава также использовалась для классификации мышц по группам. Длина плеча момента (ПМ) мышцы является важным компонентом при определении крутящего момента сустава и в сочетании с длиной волокна оценки АД сустава. Отношение длины волокна к ПМ дает способ идентификации того, какой из факторов играет большую роль в создании крутящего момента сустава и определении результирующей АД сустава. Например, тот факт, что отношение длины волокна к ПМ много выше у разгибателей запястья, чем у сгибателей, говорит о том, что в разгибателях длина волокон играет большую роль, чем в сгибателях. Хотя все скелетные мышцы имеют общую основную структурную модель, между ними имеются существенные различия по количеству, размеру, организации и типу мышечных волокон. Таким образом, попытки классификации мышц на малое количество групп могут оказаться неприемлемыми. Если брать за основу доказательство того, что субпопуляции моторных единиц мышц, но не мышечные группы действуют вместе при выполнении определенных двигательных задач, более приемлемым способом для описания мышечного действия может быть терминология, исходящая от моторных единиц. Однако в этой области требуются дальнейшие исследования, и только после этого систему классификации моторных единиц можно будет принять и широко использовать.
21.3. Факторы, влияющие на мышечную функцию
Кроме большого числа описанных ранее факторов, влияющих на мышечную функцию, следует рассмотреть некоторые другие факторы: • типы суставов и расположение мышечных прикреплений; • количество суставов, через которые проходит мышца; • пассивная недостаточность; • сенсорные рецепторы.
21.3.1. Типы суставов и расположение мышечных прикреплений Тип сустава влияет на функцию мышцы в том плане, что структура сустава определяет тип движения (сгибание и разгибание) и АД. Расположение мышцы или линия ее действия относительно сустава определяют, какое движение мышца будет выполнять. В целом, мышцы, которые проходят через переднюю часть сустава верхних конечностей, туловища и бедер — это сгибатели, а мышцы, находящиеся на задних частях этих суставов — соответственно, разгибатели. Мышцы с латеральным и медиальным расположением работают как отводящие и приводящие мышцы, соответственно, но могут выступать и в качестве ротаторов. Мышцы с дистальными прикреплениями, близкими к суставной оси, обычно могут создавать широкую АД костного рычага, к которому крепятся. Мышцы с дистальными прикреплениями далеко от суставной оси, такие как плечелучевые мышцы, предназначены обеспечивать стабильность сустава, так как большинство их силы направлено на сжимание суставных поверхностей. Относительное участие мышцы в поддержании стабильности будет меняться по ходу движения, поскольку ротационные и компрессионные компоненты мышечной силы косвенно меняют друг друга. Мышца обеспечивает максимальную стабилизацию сустава в точке максимального компрессионного компонента. Обычно одна из групп мышц, действующая на сустав, способна создать больший крутящий момент, чем действующая на него же другая группа. Нарушения нормального соотношения пар «агонист-антагонист» могут создать мышечный дисбаланс в суставе и подвергнуть его риску травмы. Отношения силы «агонист-антагонист» для нормальных суставов часто используются как основа для постановки лечебных целей вслед за травмой сустава. Например, если поврежден плечевой сустав, целью лечения может быть усиление сгибателей и разгибателей поврежденного сустава таким образом, чтобы восстановить такое же силовое отношение в поврежденном суставе.
21.3.2. Количество суставов Многие функциональные движения требуют координированных действий нескольких суставов, контролируемых комбинацией мышц, которые проходят через один или несколько суставов. Для того, чтобы создать целенаправленный двигательный паттерн, многие считают, что нужен мышечный контроль, чтобы минимизировать мышечную силу, необходимую для выполнения задачи (наименьшая активность моторных единиц) и, таким образом, свести к минимуму мышечное утомление. Такие стратегии мышечного управления пытаются уверить нас в том, что движение выполняется эффективно. Одним из способов обеспечения эффективного двигательного паттерна является координированное усилие односуставных и многосуставных мышц. Во многих случаях количество суставов, которые пересекает мышца, определяет мышечную функцию. Односуставные мышцы обычно привлекаются для создания усилия и производства работы, прежде всего при концентрическом и изометрическом сокращениях. Такая стратегия вовлечения наблюдается в основном при выполнении простого движения в одном суставе, но может также использоваться и во время движений, в которых участвует несколько суставов. Многосуставные мышцы обычно привлекаются для тонкой регуляции крутящего момента при динамических движениях, включающих в себя больше эксцентрические, чем концентрические мышечные действия. Многосуставные мышцы обычно привлекаются во время более сложных движений, требующих движения вокруг множественных осей. Например, сгибание локтя при сопутствующей супинации использует двуглавую мышцу плеча (многосуставная мышца) при дополнительном участии плечевой мышцы (односуставная мышца). Это опять же может показаться очевидным, по причине прикрепления двуглавой мышцы плеча к лучевой кости, что позволяет выполнять супинацию и одновременного прикрепления плечевой мышцы к локтевой кости, что дает чистое сгибание локтевого сустава. Если желательно односуставное движение, то привлекается односуставная мышца, потому что вовлечение многосуставной мышцы может потребовать либо использования дополнительных мышц, либо моторных единиц дополнительных мышц для блокирования движения, поступающего от другого сустава (суставов), пересекаемого многосуставными мышцами. Например, сгибание локтя с предплечьем в состоянии пронации выполняется прежде всего плечевой мышцей, но не двуглавой мышцей плеча. Односуставные и многосуставные мышцы могут также работать совместно, таким образом односуставные мышцы могут помогать движению суставов, которые они не пересекают. Например, простое движение «встать со стула» требует разгибания коленного и тазобедренного суставов. Разгибание тазобедренных суставов выполняется за счет активации односуставных разгибателей (большие ягодичные мышцы) и многосуставных разгибателей (мышцы задней поверхности бедра). Сопутствующее разгибание коленей выполняется за счет активации односуставных разгибателей (широкие мышцы) и многосуставных разгибателей (прямые мышцы бедра). Интересный вывод заключается здесь в том, что односуставные разгибатели колена могут на самом деле способствовать при указанном движении разгибанию тазобедренных суставов. Если активны мышцы задней поверхности бедра, разгибание коленей (вызываемое широкими мышцами) создает тягу активных мышц задней поверхности (которые действуют как стяжка), результатом чего и является разгибание бедра.
21.3.3. Пассивная недостаточность Если локоть находится на столе с предплечьем в вертикальном положении, а кисть может свободно наклоняться в положение сгибания, можно заметить, что пальцы при этом стремятся к разгибанию (рис. 21.12,a). Разгибание пальцев является результатом недостаточной длины разгибателей пальцев, которые растягиваются над запястьем. Недостаточная длина называется пассивной недостаточностью. Разгибание пальцев, вызванное увеличением пассивного напряжения, которое является результатом растяжение мышцы над запястьем, называется сухожильным действием мышцы или тенодезом. Если человек движет свою кисть назад, в разгибание запястья, пальцы будут идти в сгибание (рис. 21.12,b). Сгибание пальцев является результатом недостаточной длины сгибателей пальцев при натяжении их над разогнутым запястьем.
Рис. 21.12. Пассивная недостаточность, появляющаяся при тех моментах, когда: a — разгибатели пальцев вытягиваются над запястьем и пальцами при сгибании. Развиваемое пассивное напряжение вызывает разгибание пальцев (тенодез); b — сгибатели пальцев удлиняются над запястьем и пальцами при разгибании. Пассивное напряжение, развиваемое в сгибателях пальцев, заставляет их сгибаться
В нормальном состоянии, односуставным мышцам редко (если вообще) не хватает длины, чтобы помешать полной АД сустава. Двухсуставные или многосуставные мышцы, однако часто оказываются недостаточно длинными, чтобы полная АД была достигнута одновременно всеми суставами, через которые проходят эти мышцы. Пассивное напряжение, развиваемое в этих растянутых мышцах, достаточно для того, чтобы либо застопорить дальнейшее движение костного рычага (момент пассивного сопротивления = моменту усилия), либо, если один из сегментов сустава не фиксирован, может создать тягу костного рычага в направлении пассивной мышечной тяги. Если кость не может свободно двигаться в направлении пассивной мышечной тяги, может произойти повреждение растягиваемой мышцы. Обычно сигналом опасности при растяжении является боль, и для защиты мышцы включается ее активное сокращение. Когда многосуставная мышца на одной из сторон сустава слишком сильно укорачивается, то многосуставная мышца на противоположной его стороне оказывается слишком удлиненной. * * *
ПРИМЕР 5. Если запястье и пальцы согнуты одновременно, плотное сжатие кулака практически невозможно. Если пальцы полностью согнуть перед тем, как согнуть запястье, то при его сгибании пальцы будут стараться разогнуться. Если сначала согнуть запястье, то полное сгибание пальцев для плотного сжатия кулака весьма затруднительно, если возможно вообще.* * * В этом примере в то время как сгибатели пальцев укорачиваются, неактивные разгибатели пассивно натягиваются над всеми суставами, через которые они проходят. Разгибатели обеспечивают пассивное сопротивление сгибанию запястья и пальцев в тот же момент, когда сгибатели пальцев испытывают трудности с выполнением движения (рис. 21.13).
Рис. 21.13. Увеличение пассивного напряжения при пассивном удлинении мышцы. При попытке сжать кулак при полностью согнутом запястье, активное укорочение сгибателей пальцев и запястья приводит к пассивному удлинению разгибателей пальцев. Длина разгибателей пальцев недостаточна для того, чтобы позволить движение по полной амплитуде, как запястью, так и пальцам и, таким образом, она лимитирует способность сгибателей пальцев сжать кулак
Недостаточная длина разгибателей отвечает за тягу пальцев в легкое разгибание, если запястье сгибается раньше попытки согнуть пальцы. Комбинация чрезмерного удлинения пассивных мышц и попыток укорочения активных мышц является угрозой для целостности мышцы, поэтому такие положения в обычных мышечных действиях практически не встречаются, однако являются не такими уж редкими при занятиях спортом.
21.3.4. Сенсорные рецепторы На функцию мышц влияют два важных типа сенсорных рецепторов: сухожильные органы Гольджи и мышечные веретена. Сухожильные органы Гольджи, расположенные в сухожилиях, точнее, в мышечно-сухожильных соединениях, чувствительны к растяжению и могут активироваться либо при активном сокращении мышцы, либо при ее избыточном пассивном растяжении. При возбуждении сухожильных органов Гольджи они посылают в нервную систему сообщения на торможение мышцы, в сухожилии которой расположены. Мышечные веретена, состоящие из 2-10 специализированных мышечных волокон (интрафузальные волокна), находятся в оболочке из соединительной ткани и рассеяны по всей мышце. Эти волокна чувствительны к изменениям длины и скорости удлинения мышечных волокон (экстрафузальных волокон). Веретена активируются при удлинении мышцы. Они посылают сигналы к мозжечку о состоянии растяжения мышцы. При укорочении мышечных волокон поток сигналов от веретен прекращается, поскольку сами они больше не растянуты. При уменьшении потока сигналов, высшие центры посылают свои сообщения к интрафузальным мышечным волокнам в веретенах на укорочение, чтобы те снова были в состоянии реагировать на изменение длины мышцы. Мышечные веретена отвечают за посылку сообщений на сокращение к мышцам, в которых они находятся, если по сухожилию постучать молоточком. Быстрое растяжение мышцы, вызванное постукиванием по сухожилию, активирует мышечные веретена, и мышца отвечает на неожиданные сигналы веретена кратким сокращением. Эта реакция известна под разными названиями, например: глубокий сухожильный рефлекс (ГСР), мышечно-веретенный рефлекс (МВР) или просто рефлекс растяжения[6]. Как сухожильные органы Гольджи, так и мышечные веретена помогают защищать мышцу от повреждений, отслеживая изменения ее длины. Наличие рефлекса растяжения весьма благоприятно для предотвращения повреждения мышцы, однако представляет проблему при лечебных или тренировочных программах, в которых растягивание мышц желательно для улучшения гибкости и восстановления движения в суставе по полной амплитуде. Мышечное сокращение или рефлекторная активация моторных единиц при намеренном растягивании мышц могут создавать сопротивление растяжению и делать его затруднительным и даже неэффективным. В настоящее время ведутся исследования методов растягивания, которые могли предотвратить бы такую рефлекторную и активацию моторных единиц при упражнениях. Несократительные элементы мышц тоже создают сопротивление растягиванию, и, при реализации программы растягивания, о них не следует забывать. Рецепторы, находящиеся в суставных капсулах и связках, могут оказывать влияние на мышечную активность посредством сигналов, передаваемых к ЦНС. Отек суставной капсулы и вредоносные стимулы, такие как ее защемление, вызывают рефлекторное торможение мышц. * * *
ПРИМЕР 6. Ноцицепторы и другие рецепторы, находящиеся внутри и вокруг коленного сустава, могут оказывать действие по типу возбуждения сгибателей и торможения разгибателей. Торможение вызывается даже при небольшом, неразличимом невооруженным глазом, суставном выпоте.* * * Влияние сенсорных рецепторов на мышечную активность добавляет к ранее рассматривавшимсяфакторам аспект непроизвольного контроля мышечной функции. Обзор недавней литературы, относящейся к контролю движений или «науке движения» не помещается в рамки данной работы, однако некоторые его аспекты уже рассмотрены ранее в части II.
21.4. Эффекты иммобилизации, травм и старения
Иммобилизация. Иммобилизация воздействует как на структуру, так и на функцию мышцы. Эффекты зависят от позиции иммобилизации (вытянутая или укороченная), процентного соотношения типов волокон в мышце и продолжительности иммобилизации. Исследования одиночных волокон и целых мышц показали, что иммобилизация в укороченном положении вызывает следующие структурные изменения: • уменьшение числа саркомеров; • увеличение длины саркомеров; • увеличение перимизия; • утолщение внутреннего перимизия; • увеличение соотношения содержания коллагена; • увеличение соотношения «соединительная ткань/мышечные волокна»; • потерю веса и атрофию. Изменения функции в результате иммобилизации в укороченном состоянии отражают структурные изменения. Уменьшение количества саркомеров в сочетании с увеличением их длины выводит мышцу на такую длину, при которой она может развить максимальное напряжение в обездвиженной позиции. Потеря саркомеров смещает отношение «длина-напряжение» таким образом, что максимальное генерируемое напряжение соответствует как раз положению иммобилизации, т. е. мышца способна развивать максимальное напряжение в укороченном состоянии. Хотя такая измененная способность может быть благоприятной при иммобилизации мышцы в состоянии укорочения, она может оказаться неспособна к эффективной работе с суставом, через который проходит, сразу же после окончания иммобилизации. Мышца, адаптировавшаяся к укороченному состоянию, будет пассивно сопротивляться удлинению, тем самым, стопоря движение сустава. Более того, снижается общая способность мышцы к генерации напряжения. Увеличение содержания соединительной ткани по отношению к мышечным волокнам приводит к повышенной жесткости при пассивном растягивании. Причины повышенной утомляемости мышцы после иммобилизации в укороченном состоянии являются пока еще предметом исследований. Иммобилизация мышц в удлиненном состоянии дает меньшие структурные и функциональные изменения. Основными структурными изменениями являются увеличение количества и уменьшение длины саркомеров, а также мышечная гипертрофия, за которой может последовать атрофия. Основными функциональными изменениями являются увеличение способности к генерации максимального напряжения и смещение кривой «длина-напряжение» ближе к позиции иммобилизации при удлинении. Пассивное напряжение в мышце остается примерно таким же, как до иммобилизации. Восстановление мышц от последствий иммобилизации в укороченном состоянии (развитие прежней способности к генерации максимального напряжения, восстановление кривой «длина-напряжение» и растяжимости) может занять довольно долгое время. Однако профилактика последствий такого рода иммобилизации может потребовать весьма кратковременных, но ежедневных движений. В целом, предупреждение относительно интерпретации реакции мышц на иммобилизацию звучит примерно так: «Исследования адаптации саркомеров к иммобилизации исследовались на отдельных мышцах животных. Относятся ли такие изменения ко всем мышцам, и достоверны ли полученные данные в отношении мышц человека — пока неясно». Травма. Перегрузки могут вызывать травмы сухожилий, связок, сумок, нервов, хрящей и мышц. Общей этиологией этих повреждений является повторяющаяся травма, которая не позволяет полностью восстановиться тканям. Добавочные эффекты повторного действия сил ведут к микротравмам, которые, в свою очередь, запускают воспалительный процесс, ведущий к отеку. Наиболее часто перегрузки поражают мышечно-сухожильное сочленение. Сухожилия могут утомляться от повторных субмаксимальных нагрузок и в этом случае подвергаются травмам легче, чем в случае, когда нагрузка воздействует быстро и поперек сухожилия, а мышечная группа растягивается за счет внешней стимуляции. Сумки в результате выпота, могут воспаляться, и, после повторных травм, может наблюдаться утолщение стенок сумки. Нервы могут подвергаться компрессионным повреждениям вследствие гипертрофии мышц, снижения гибкости и изменений механики сустава. Травмы мышц могут возникать как результат даже однократного выполнения эксцентрических упражнений. После 3-40 мин эксцентрических нагрузок (ходьба под гору), или всего 15–20 повторений эксцентрических сокращений с высокой мощностью, наблюдаются значительные и устойчивые снижения максимального произвольного сокращения мышц. Кроме этого, могут наблюдаться потеря координации, отсроченная боль в мышцах (ОБМ), отеки и сильное увеличение жесткости мышц. ОБМ достигает пика через 2–4 дня после выполнения нагрузки. ОБМ возникает в мышцах, выполнявших эксцентрическую нагрузку, но никогда — в мышцах, выполнявших концентрические сокращения. Причина возникновения ОБМ пока еще является предметом исследования. Известно, что она связана с силами, действующими на мышцы, и может быть результатом механического растяжения мышечных волокон или связанных с ними соединительных тканей. Морфологические данные указывают на деформацию линии Z (протекание линии Z) и других точечных повреждений вследствие эксцентрической работы, которые вызывают эту боль. Биомеханические и гистохимические исследования продемонстрировали доказательства разрывов коллагена и другие изменения соединительных тканей. Старение. По мере старения человека, сила скелетных мышц уменьшается вследствие изменений типа волокон и распределения моторных единиц. После 60 лет некоторые мышцы теряют мышечные волокна (широкие латеральные мышцы), причем потери могут составлять от 25 до 50 % в 70 и 80 лет соответственно. Кроме того, в мышцах постепенно уменьшается число и размер волокон типа II, которые замещаются относительным увеличением числа волокон типа I. Также происходит уменьшение количества моторных единиц, причем в остающихся моторных единицах число волокон на единицу возрастает. При старении также увеличивается содержание соединительной ткани в эндомизии и перимизии скелетных мышц. Считается, что увеличение количества соединительной ткани приводит к уменьшению АД и повышению жесткости мышц. В недавнее время появились работы, свидетельствующие, что жесткость с возрастом может не меняться и даже уменьшаться. Упражнения с сопротивлением в пожилом возрасте оказывают положительное влияние на стареющие мышцы, вызывая увеличение размера мышечных волокон, прирост силы и функциональной производительности. Однако у пожилых людей наблюдаются более ограниченные реакции на упражнение с сопротивлением, чем у молодых.
Резюме
На мышечную функцию оказывает влияние множество факторов. В настоящей части в значительном количестве были представлены основные элементы мышечной структуры и их взаимосвязи с мышечными функциями. Взаимосвязь структуры и функции в мышцах довольно сложна и зачастую почти неразличима. Мышцы более адаптивны, чем суставы, которые они обслуживают, равно как и более сложны. Для замены человеческих суставов разработаны и успешно используются суставы искусственные, но вот изобрести подобие человеческой мышцы пока что еще никому не удалось. К настоящему времени наши знания о мышечном сокращении на уровне саркомера еще недостаточны. Однако известно, что структурные характеристики мышечных волокон меняются в ответ на изменение функциональных требований. Упражнения, выполняемые при высоком сопротивлении с малым числом повторений (подъем тяжестей) вызывают увеличение размеров волокон типа II. Поскольку производимое мышцей напряжение определяется общей площадью поперечного сечения активных мышечных волокон, рост размеров мышечных волокон увеличивает и общее выходное напряжение мышцы. Изменения окислительных способностей мышцы отмечаются после тренировок на выносливость, однако доказательств, что такая тренировка увеличивает сократительную скорость волокон, не найдено. Все скелетные мышцы придерживаются общих принципов структуры и функции, которые и были представлены в настоящей части. Мышцы создают движение в суставах, а также обеспечивают их стабильность.
Контрольные вопросы
1. Опишите сократительные и не сократительные элементы мышцы. 2. Объясните, что происходит на уровне саркомера при сокращении мышцы. 3. Определите антагонисты при каждом из следующих движений: отведение плеча, сгибание плеча, отведение бедра. 4. Опишите действие следующих мышц, когда фиксирован дистальный сегмент кости, а проксимальный сегмент перемещается: трехглавая мышца плеча, двуглавая мышца плеча, средняя ягодичная мышца, Подвздошно-поясничная мышца и мышцы задней поверхности бедра. Приведите примеры деятельности, при которых наблюдается такой тип действия этих мышц. 5. Сравните функцию четырехглавой мышцы бедра и мышц задней поверхности бедра на основании архитектурных характеристик каждой мышечной группы. 6. Нарисуйте диаграмму изменений ПМ двуглавой мышцы плеча от полного разгибания в локтевом суставе до полного сгибания. Объясните, как эти изменения влияют на функцию мышцы. 7. Идентифицируйте мышцы, которые участвуют в опускании на кресло с использованием рук. Является ли мышечное сокращение эксцентрическим или концентрическим? Действуют ли мышцы реверсивно? Объясните свой ответ. 8. Опишите факторы, влияющие на развитие активного напряжения в мышце. Подскажите положения верхней конечности, в которых каждая из перечисленных мышц будет неспособна развить максимальное напряжение: двуглавая мышца плеча, трехглавая мышца плеча, и глубокий сгибатель пальца. Опишите положение, в котором эти же мышцы могут пассивно ограничивать движение (быть пассивно недостаточными). 9. Объясните чем моторная единица, состоящая из волокон типа I, отличается от моторной единицы, состоящей из волокон типа II. 10. Перечислите факторы, влияющие на мышечную функцию, и объясните, как именно каждый из факторов влияет на нее. 11. Объясните, чем изокинетическое упражнение отличается от других типов упражнений, таких, как подъем тяжести и изометрические упражнения. 12. Объясните, что такое изокинетические упражнения. 13. Опишите последствия иммобилизации для мышц. 14. Опишите адаптационные изменения, происходящие в скелетных мышцах при старении.
Литература
1. Александер Р. Биомеханика. — М.: Мир, 1970. — 340 с. 2. Алешинский С.Ю., Зациорский В.М. Механико-математические модели движений человека // В кн.: Биомеханика физических упражнений. — Вып. I. — Рига: Рижский политехн. Ин-т, 1974. — С. 60–123 (ротапринт). 3. Бегун П.И., Афонин П.Н. Моделирование в биомеханике. — М.: Высшая школа, 2004. — 392 с. 4. Бегун П.И., Шукейло Ю.А. Биомеханика. — СПб.: Политехника, 2000. — 464 с. 5. Бернштейн Н.А. О построении движений. — М., 1947. 6. Бернштейн Н.А. Очерки физиологии движений и физиологии активности. — М.: Медицина, 1966. 7. Богданов В.А., Гурфинкель В.С. Роль информации при силовом взаимодействии между стопами и опорой в процессе управления локомоцией. — Биофизика, 1975. — Т. 20. — Вып. 3. — С. 522–526. 8. Бранков Г. Основные проблемы биомеханики. — Успехи механики, Варшава, Гос. Научное изд., 1978. — С. 45–68. 9. Бранков Г. Основы биомеханики. — М.: Мир, 1981. — 256 с. 10. Витензон А.С. Динамические фазы цикла ходьбы // В сб.: Биомеханика. — Рига, 1975. — С. 251–257. 11. Герман И. Физика организма человека. — М.: Интеллект, 2011. — 976 с. 12. Гирке Х.Э. Биодинамическое поведение тела человека // В сб.: Механика. — М.: Мир, 1966. — № 1 (95). — С. 146–164. 13. Гуревич Р.А., Тютюник И.Ф. Устройство для определения центра тяжести человека // Ортоп. травмотол. — 1973. — № 2. — С. 80–81. 14. Гурфинкель В.С., Исаков П.К., Малкин В.Б., Попов В.И. Координация позы и движений человека в условиях повышенной и пониженной гравитации // Бюлл. эксперим. биол. и мед. — Т. 48. II. — С. 12. 15. Гурфинкель В.С., Коц Я.М., Шик М.Л. Регуляция позы человека. — М.: Наука, 1965. — 256 с. 16. Девянин Е.А., Ленский А.В. Некоторые вопросы механики роботов и биомеханики. — М.: Изд-во МГУ, 1978. 17. Донской Д.Д. Биомеханика с основами спортивной техники. — М.: Физкультура и спорт, 1971. — 288 с. 18. Донской Д.Д. Биомеханика: Учебное пособие. — М.: Просвещение, 1975. — 239 с. 19. Донской Д.Д. Движения спортсмена: Очерки по биомеханике спорта. — М.: Физкультура и спорт, 1965. — С. 3–90. 20. Донской Д.Д. Законы движений в спорте: Очерки по структурности движений. — М.: Физкультура и спорт, 1968. — 176 с. 21. ДонскойДД., Зациорский В.М. Биомеханика: Учебник для институтов физической культуры. — М.: Физкультура и спорт, 1979. — 264 с. 22. Дубровский В.И., Федорова В.Н. Биомеханика: Учеб. пособие для сред. и высш. учебных заведений. — 2-е изд. — М.: ВЛАДОС-ПРЕСС, 2004. — 672 с. 23. Жуков Е.К., Котельникова Е.Г., Семенов Д.А. Биомеханика физических упражнений: Учебное пособие. — М.: Физкультура и спорт, 1963. — С. 3–114. 24. Задания и методические указания для самостоятельной работы студентов по курсу «Биомеханика» / Сост. А.И. Навойчик. — Гродно: ГрГУ, 1992. — С. 3–8. 25. Зациорский В.М., Арутин А.С, Селуянов В.Н. Биомеханика двигательного аппарата человека. — М.: Физкультура и спорт, 1981. — 143 с. 26. Иванова Г.П., Фетисова С.Л. О построении биомеханической системы двигательного аппарата при ударах // В сб.: Биомеханика, Рига, 1975. — С. 548–552. 27. Исследования по биодинамике локомоции. Кн. 1 / Под ред. Н.А. Бернштейна. — М., 1935. — 233 с. 28. Карпович А.Л., Смоляников В.В. Кинематические закономерности ходьбы человека // Тр. Рижского НИИ травматологии и ортопедии, 1975. — Вып. 13. — С. 672–677. 29. Кацитадзе З.И. Анатомо-биомеханические основы эволюции вертикальной ходьбы: Дис… д-ра мед. наук. — М., 1971. — С. 387. 30. Коренберг В.Б. Основы качественного биомеханического анализа. — М.: Физкультура и спорт, 1979. — 208 с. 31. Коренев Г.В. Цель и приспособляемость движений. — М., 1974. 32. Лапутин А.Н. К вопросу о классификации биокинематических пар и цепей человека // В кн.: Биомеханика, Рига, 1975.— C. 572–574. 33. Лапутин А.Н. Новые данные о биокинематике двигательной системы человека // В кн.: Методические разработки по биомеханике. — Киев, 1971. — Т. I. — С. 6–87 (ротапринт). 34. Лапутин А.Н. Об единой системе отсчета в исследованиях фиксированных положений и сложных пространственных движений человека // В сб.: Биомеханика. — Рига, 1975. — С. 568–572. 35. Назаров В.Т. Движения спортсмена. — Мн.: Полымя, 1984. — С. 3–47. 36. Петров В.А., Гагин Ю.А. Механика спортивных движений. — М.: Физкультура и спорт, 1974. — 232 с. 37. Проблемы прочности в биомеханике / Под ред. И.Ф. Образцова. — М.: Высшая школа, 1988. — 312 с. 38. Тарьян И. Физика для врачей и биологов. — Будапешт, 1969. — 600 с. 39. Фарфель В.С. Управление движениями в спорте. — М.: Физкультура и спорт, 1975. — С. 204. 40. Черний А.В. Биомеханика опорных взаимодействий тела человека при некоторых видах прыжковых движений // В сб.: Биомеханика, Рига, 1975. — C. 574–579. 41. Чуйко А.Н., Вовк В.Е. Особенности биомеханики в стоматологии. — Харьков: Прапор, 2006. — C. 301. 42. Чхаидзе Л.В. Об управлении движениями человека. — М.: Физкультура и спорт, 1970. — С. 28–103. 43. Янсон Х.А. Биомеханика нижней конечности человека. — Рига: Зинатне, 1975. — 210 с. 44. Aagaard H, Verdonk R. Function of the normal meniscus and consequences of meniscal resection. Scand J. Med Sci Sports 9:134, 1999. 45. Abe S. et al. Perspectives on the role of the lateral pterygoid muscle and the sphenomandibular ligament in temporomandibular joint functions. Cranio 15: 203–207, 1997. 46. Abenerhty P.J. et al. Is chondomalacia patella a separate clinical entity? J. Bone Joint Surg 60B:205–210, 1978. 47. Adams M.A., Hutton W.C. Gradual disc prolapse. Spine 10:524–531, 1985. 48. Adams M.A., Dolan P., Hutton W.C. The lumbar spine in backward bending. Spine 13:1019–1026, 1988. 49. Adams M.A., Hutton W.C. The mechanical function of the lumbar apophyseal joints. Spine 8: 327–330, 1983. 50. Adams M.A., Dolan P. A technique for quantifying the bending moment on the lumbar spine in vivo. J. Biomech 24:117, 1991. 51. Adam M. and Deyl Z. Degenerated annulus fibrosus of the intervertebral disk contains collagen type III. Ann Rheum Dis 43:258–263, 1984. 52. Ahrens S.F. The effect of age on intervertebral disc compression during running. J. Othop Sports Phys Ther 20:17, 1994. 53. Allan D.A. Structure and physiology of joints and their relationship to repetitive strain injuries. Clin Orthop Rel Res 352:32, 1998. 54. Alnaqeeb M.A., Alzaid N.S. and Goldspink G. Connective tissue changes and physical properties of developing and aging skeletal muscle. J. Anat 139:677–689, 1984. 55. Anderson G.BJ. et al. Analysis and measurement of the loads on the lumbar spine during work at a table. J. Biomech 17:513,1979. 56. Bogduk N., Amevo B. and Pearcy M. A biological basis for instantaneous centers of rotation of the vertebral column. Proc Inst Mech Engrs 209:177, 1995. 57. Bogduk N. and Engel R. The menisci of the lumbar zygapophyseal joints. Spine 9:454–460, 1984. 58. Bogduk N., Windsor M. and Inglis A. The innervation of the cervical intervertebral discs Spine 13:2–7, 1988. 59. Booth F. Physiologic and biomechanical effects of immobilization on muscle Clin Orthop Rel Res 219:15–20, 1986. 60. Borello-France D.F. et al. Modification of sitting posture of patients with hemiplegia using seat boards and backboards. Phys Ther 68:67–71, 1988. 61. Bourbon B.M. Anatomy and biomechanics of the TM. In Kraus, SL; TMI Disorders; Management of the Cran-iomandibular Complex. Churchill Livingstone. New York, 1988. 62. Bowen V. and Cassidy J. D. Macroscopic and microscopic anatomy of the sacroiliac joint from embryonic life until the eighth decade. Spine 6:620–627, 1981. 63. Brandt K.D. et al. Bone seriography in the canine cruciate deficiency model of osteoarthritis Comparison of the unstable and contralateral knee. J. Rheumatol 24:140, 1997. 64. Brand R.W. and Isselhard D.E. Anatomy of Orofacial Structures, ed 2. CV Mosby. St Louis. 1982, Kirk. W.S. and Calabrese. DK: Clinical evaluation of physical therapy in the management of internal derangement of the temporomandibular joint. J. Oral Maxillofac Surg 47:113-H9, 1989. Nickerson. J.W. and Boering G.: Natural course of osteoarthritis as it relates to internal derangement of the temporomandibular joint. Oral Maxillofac Surg Clin North Am 1:1, 1989. 65. Brickley-Parsons D. and Glimcher M.J. Is the chemistry of collagen in the intervertebral disc an expression of Wolff’s law? Spine 9:148–182, 1984. 66. Brown M. Resistance exercise effects on aging skeletal muscle in rats. Phys Ther 69:46–53, 1989. 67. Brody J.E. For artists and musicians creativity can mean illness and injury. New York Times, October 17, 1989. 68. Brunnstrom S. Clinical Kinesiology, ed 3. FA Davis, Philadelphia, 1972. 69. Buecke F. Principles of Physics, ed 3. McGraw-Hill, New York, 1977. 70. Burkholder T. et al. Relationship between muscle fiber types and sizes and muscle architectural properties in the mouse hindlimb. J. Morphol 221:177–190, 1994. 71. Bullough P.G. and Jagannath A. The morphology of the calcification front in articular cartilage. J. Bone joint Surg 58A:4, 1976. 72. Buroker К.С. and Schwane J.A. Does postexercise static stretching alleviate delayed muscle soreness? Phys Sports Med 17:65–83, 1989. 73. Buseck M. et al. Influence of dynamic factors and external loads on the moment at the lumbar spine in lifting. Spine 13:918–920, 1988. 74. Cailliet R. Soft Tissue Pain and Disability, ed 2. FA Davis, Philadelphia, 1988. 75. Cans C. Fiber architecture and muscle function. Exerc Sports Sci Rev 10160-207, 1982. 76. Carter D.R., Orr Т.Е. and Fyhrie D.P. Relationship between loading history and femoral cancellous bone architecture. J. Biomech 22:231, 1989. 77. Cailliet R. Neckand Arm Pain, ed 3. FA Davis, Philadelphia, 1991. 78. Cailliet R. Low Back Pain Syndrome, ed 5 FA Davis, Philadelphia, 1995. 79. Cailliet R. Soft Tissue Pain and Disability, ed 3. FA Davis. Philadelphia, 1996. 80. Cailliet R. Foot and Ankle Pain, ed. 3. F. A. Davis, Philadelphia, 1997. 81. Callaghan J.P. Gunning J.L. and McGill. S.M. The relationship between lumbar spine load and muscle activity during extensor exercises. 82. Cassidy J.D. The pathoanatomy and clinical significance of the sacroiliac joints. J. Manipulative Physiol Ther 15:41, 1992. 83. Cerny K. Pathomechanics of stance: Clinical concepts for analysis. Phys Ther 64:1851–1858, 1984. 84. Chadially F.H. Structure and function of articular cartilage. Clin Rheum Dis 7:3. 1980. 85. Childress D.S. and Gard S.A. Investigation of vertical motion of the human body during normal walking |abstract|. Gait Posture 5:161, 1997. 86. Chleboun C.S. et al. Relationship between muscle swelling and stiffness after eccentric exercise Med Sci Sport Exerc 30:529–535, 1998. 87. Cholewicki I. et al. Effects of posture and structure on three-dimensional coupled rotations in the lumbar spine. Spine 21:2421, 1996. 88. Clark C.R. and Ogden F.A. Development of menisci of human knee joint. J. Bone Joint Surg 65A:538–546, 1983. 89. Clement D.B. et al. A survey of overuse running injuries. Phys Sports Med 9:5, 1981. 90. Clement G. and Lestienne F. Adaptive modifications of postural attitude in conditions of weightlessness. Exp Brain Res 72:381–389, 1988. 91. Coel V.K. et al. Moment-rotation relationship of the ligamentous occipito-atlanto-axial complex. J. Biomech 8:673–680, 1988. 92. Cohen N.P., Foster R.J. and Mow V.O. Composition and dynamics of articular cartilage: Structure, function and maintaining healthy state. J. Othop Sports Phys Ther 28:203, 1998. 93. Colliander E.B., Dudley G.A. and Tesch P.A. Skeletal muscle fiber type composition and performance during repeated bouts of maximal concentric contractions. Eur I Appl Physiol 58:81–86, 1988. 94. Connolly B. Postural applications in the child and adult. In Kraus S. (ed). Clinics in Physical Therapy. Vol 11. Churchill Livingstone, New York, 1988. 95. Coventry M.B. and Taper E.M. Pelvic instability. J. Bone joint Surg 54A:83, 1972. 96. Cox I.S. Patellofemoral problems in runners. Clin Sports Med 4:699715, 1985. 97. Cray J.C. Neural and vascular anatomy of the menisci of the human knee. J. Orthop Sports Phys Ther 29:29, 1999. 98. Cremar M.A., Rosloneic E.F. and Kang A.H. The cartilage collagens: A review of their structure, organization and role in the pathogenesis of experimental arthritis in animals and in human rheumatic disease J. Mol Med 76:275, 1998. 99. Crisco J.J, Panjabi M.M. and Dvorak J. A model of the alar ligaments of the upper cervical spine in axial rotation. J. Biomech 24:607, 1991. 100. Crowinshield R.D. et al. Effects of walking velocity and age of hip kinematics and kinetics. Bull Hosp Joint Dis 38:1977. 101. Cuissard N., Duchateau and Hainaut K. Muscle stretching and motor-neuron excitability. Eur J. Appl Physiol 58:47–52, 1988. 102. Culav E.M., Clark C.H. and Merilee M.J. Connective tissues: Matrix composition and its relevance to physical therapy. Phys Ther 79:308, 1999. 103. Curwin S.L. Tendon Injuries: Pathophysiology and Treatment. In Zachazewski I. E., Magee D. J. and Quillen W. S. (eds): Athletic Injuries and Rehabilitation WB Saunders, Philadelphia, 1996. 104. Cyron B.M. and Hutton W.C. The tensile strength of the capsular ligaments of the apophyseal joints. J. Anat 132:145–150, 1981. 105. Davies M.L. and Dalsky G.P. Economy of mobility in older adults. J. Orthop Sports Phys Ther 26:69, 1997. 106. Decraemer W.F. et al. A non-linear viscoelastic constitutive equation for soft biological tissues based upon a structural model. J. Biomech 13:559, 1980. 107. Dijkstra P.U. et al. Influence of mandibular length on mouth opening). Oral Rehab 26:117–122. 1999. Naidoo. LC: Lateral pterygoid muscle and its relationship to the meniscus of the temporomandibular joint. Oral Sur Oral Med Oral Pathol Oral Radiol Endodon 82:4–9, 1996. 108. DiFabio R.P. and Emasithi A. Aging and the mechanisms underlying head and postural control during voluntary motion. Phys Ther 77:458, 1997. 109. Dietz V. Evidence for a load receptor contribution to the control of posture and locomotion. Neurosci Biobehav Rev 22:495, 1998. 110. Djurasovic M. et al. Knee joint immobilization decreases aggrecan gene expression in the meniscus. Am J. Sports Med 26:460, 1998. 111. Doherty T.J. et al. Effects of aging on the motor unit. A brief review. Can | Appl Physiol 18:331–358, 1992. 112. DonTigny R.L. Function and pathomechanics of the sacroiliac joint: A review. Phys Ther 65:35–44, 1985. 113. Dolan P., Mannion A.F. and Adam M.A. Passive tissues help the muscles to generate extensor moments during lifting. J. Biomech 27:1077, 1994. 114. Dvorak J. et al. In vivo flexion/extension of the normal cervical spine. J. Orthop Res 9:828, 1991. 115. Duff-Raffaele M. et al. The proportional work of lifting the center of mass during walking. Am J. Phys Med Rehabil 75:975, 1996. 116. Earll M. et al. Contribution of the deltoid ligament to ankle joint contact characteristics: A cadaver study. Clin Sports Med 17:317–324, 1996. 117. Eckstein F. et al. Effect of physical exercise on cartilage volume and thickness in vivo: MR imaging study. Radiology April: 243, 1998. 118. Edgar M. Pathologies associated with lifting. Physiotherapy 65:8, 1979. 119. Edelson I.G., and Nathan H. Stages in the natural history of the end-plates. Spine 13:21–26, 1988. 120. Edgerton V.R. Mammalian muscle fiber types and their adaptability. Am Zool 18:113, 1978. 121. Eggleton T.M. and Langton D.M. Clinical Anatomy of the TMI Complex. In Kraus SL (ed): Temporomandibular Disorders, ed 2. Churchill Livingstone. New York, 1994. 122. Eichenblat M. and Nathan H. The proximal tibiofibular joint. Int Orthop (SICOT) 7:31–39, 1983. 123. Elbe R.J. et al. Gait initation by patients with lower-half parkinsonism. Brain 119:1705, 1996. 124. Eng J.J. and Winter D.A. Kinetic analysis of the lower limbs during walking: What information can be gained from a three dimensional model? J. Biomech 28:753, 1995. 125. Enoka R.M. Eccentric contractions require unique activation strategies by the nervous system. Appl Physiol 81:2339–2346, 1996. 126. Entman M.L. and Van Winkle W.B. (eds): Sarcoplasmic Reticulum in Muscle Physiology. Vol I Boca Raton, FL, CRC Press, 1986. 127. Entyre B.R. and Abraham. L.D. Antagonist muscle activity during stretching: A paradox revisited Med Sci Sports Ex 20:285–289, 1988. 128. Enwemeka C.S. Tendon Growth and Regeneration. In Currier D. P. and Nelson R.M (eds): Dynamics of Human Biologic Tissues. FA Davis, Philadelphia, 1992. 129. Ermshar C.B. Anatomy and neuroanatomy. In Morgan, DH. House, LR. Wall, WP and Vamvas, S. (eds): Diseases of the Temporomandibular Apparatus: A Multi-disciplinary Approach, ed 2. CVMosby. St Louis, 1982. 130. Eyre D.R. In Ghosh, P (ed): The Biology of the Intervertebral Disc, Vol 1. CRC Press, Boca Raton, FL 1988. 131. Eyzaguirre C. and Fidone S. Physiology of the Nervous System, ed 2. Yearbook Medical Publishers. Chicago, 1975. 132. Ferrario V.F. et al. Open-close movements in the human temporomandibular joint: Does a pure rotation around the intercondylar hinge axis exist? J. Oral Rehab 23:401–408, 1996. 133. Ficat P. Lateral fascia release and lateral hyperpressure syndrome. In Pickett J. C. and Radin I. L. (eds). Chondromalacia of the Patellae. Williams & Wilkins, Baltimore, 1983. 134. Finneson B. Low Back Pain, ed 2. IB Lippincott, Philadelphia, 1980. 135. Forkin D.M. et al. Evaluation of kinesthetic defects indicative of balance control in gymnasts with unilateral chronic ankle sprains. Phys Ther 23:245, 1996. 136. Forsell M.Z. The Swedish back school. Physiotherapy 66:4,1980. 137. Foreman J. How to tell is you are muggable. Boston Globe, January 20, 1981. 138. Francis R.S. Scoliosis screening of 3.000 college-aged women: The Utah study. Phase 2. Phys Ther 68:1513–1516,1988. 139. Frank C.B. Ligament Injuries: Pathophysiology and Healing. In Zac azewski I. E., Magee D. J. and Quillen W. S. (eds): Athletic Injuries and Rehabilitation WB Saunders, Philadelphia, 1996. 140. Franklin M.E. and Conner-Kerr T. An analysis of posture and back pain in the first and third trimesters of pregnancy. J. Orthop Sports Phys Ther 28:133, 1998. 141. Freeman M.D., Fox D. and Richards T. The superior intracapsular ligament of the sacroiliac joint: Presumptive evidence for confirmation of llli’s ligament. J. Manipulative Physiol Ther 13:384, 1990. 142. Fujita Y. and Lotz J. С. Radial tensile properties of the lumbar annulus fibrosus are site and degeneration dependent. J. Ortho Res 15.814, 1997. 143. Fukubayashi T. et al. An in vitro biomechanical evaluation of anterior-posterior motion of the knee. J. Bone Joint Surg 64A:258–264, 1982. 144. Gajdosik R. et al. Influence of age on concentric isokinetic torque and passive extensibility variables of the calf muscles of women. Eur I Appl Physiol 74:279–286, 1996. 145. Garbalosa J. et al. The frontal plane relationship of the forefoot to the rearfoot in an asymptomatic population. J. Orthop Sports Phys Ther 20:200–206, 1994. 146. Gard S.A. and Childress D.S. The influence of stancephase knee flexion on the vertical displacement of the trunk during normal walking. Arch Phys Med Rehabil 80:26, 1999. 147. Gard S.A. and Childress D.S. The effect of pelvic list on the displacement of the trunk during normal walking. Gait Posture:, 5:233, 1997. 148. Gardner-Morse M., Stokes I.A. and Laible F. Role of muscles in lumbar spine stability in maximum extension efforts. J. Orthop Res 13:802, 1995. 149. Garn S.N. and Newton R.A. Kinesthetic awareness in subjects with multiple ankle sprains. Phys Ther 68:1667–1671, 1988. 150. Garrett W.E., Califf. J.C. and Bassett F.H. Histochemical correlates of hamstring injuries Am I Sports Med 12:98-103, 1984. 151. Geppert M. et al. Lateral ankle instability as a cause of superior peroneal retinacular laxity: An anatomic and biomechanical study of cadaveric feet. Foot Ankle 14:330–334, 1993. 152. Ghosh P. The Biology of the Intervertebral Disc. Vol. I, CRC Press, Boca Raton, Florida, 1988. 153. Gielen C.C. A.M. and Denier van der Gon. I): The activation of motor units in coordinated arm movements in humans. News Physiol Sci 5:159–163, 1990. 154. Gleeson P.B. and Pauls J.A. Obstetrical physical therapy: Review of literature. Phys Ther 68:1699–1702,1988. 155. Goel V.K. et al. A combined finite element and optimization investigation of lumbar spine mechanics with and without muscles. Spine 18:1531, 1993. 156. Goldberg C.J. et al. Adolescent idiopathic scoliosis as developmental instability. Genetica 96:247, 1995. 157. Goldberg C.J. et al. Scoliosis and developmental theory: Adolescent idiopathic scoliosis. Spine 22:2228, 1997. 158. Goldstein S.A. et al. Analysis of cumulative strain in tendons and tendon sheaths. J. Biomech 20:1, 1987. 159. Gollnick P.D. el al: The muscle biopsy: Still a research tool. Phys Sports Med 8:1, 1980. 160. Gordon. A.M., Huxley A.F. and Mian F. J. The variation in isometric tension with sarcomere length in vertebrate muscle fibers. I Physiol 184:170–192, 1966. 161. Gould J.A. and Davies G.J. (eds): Orthopaedics and Sports Physical Therapy. CV Mosby, St. Louis, 1985. 162. Gowitzke B.A. and Milner M. Understanding the Scientific Basis of Human Movement, ed 3. Williams & Wilkins, Baltimore, 1988. 163. Gowitzke B.A. and Milner M. Scientific Basis of Human Movement, ed3. Williams & Wilkins. Baltimore, 1988. 164. Gracovetsky S. The Spinal Engine. Springer-Verlag. New York, 1988. 165. Gracovetsky S. and Farfan H. The optimum spine. Spine II:543–573, 1986. 166. Gracovetsky S.A. The resting spine: A conceptual approach to the avoidance of spinal reinjury during rest. Phys Ther 67:549–553, 1987. 167. Granata K.P. and Marras W.S. The influence of trunk muscle coactivity on dynamic spinal loads. 20:913, 1995. 168. Grieve D.W. Gait patterns and speed of walking. Biomedicine (Eng) 3:119, 1968. 169. Grieve G.P. The sacroiliac joint. Physiotherapy 62:8, 1979. 170. Griffin I.W. Differences in elbow flexion torque measured concentrically, eccentrically, and isometrically PhysTher, 67:1205–1208, 1987. 171. Grigg P. Articular Neurophysiology. In Zachazewski I. E., Magee D. J. and Quillen W. S. (eds): Athletic Injuries and Rehabilitation. WB Saunders, Philadelphia, 1996. 172. Grimby. G. et al. Training can improve muscle strength and endurance in 78- to 84-yr-old men J. Appl Physiol 73:2517–2523, 1992. 173. Gunzberg R. et al. Role of the capsulo-ligamentous structures in rotation and combined flexion/rotation of the lumbar spine. J. Spinal Disorders 5:1, 1992. 174. Gussoni M. et al. Energy cost of walking with hip impairment. Phys Ther 70:295–301, 1990. 175. Haher T.R. et al. Instantaneous axis of rotation as a function of three columns of the spine. Spine 17:Sl49, 1992. 176. Haher T.R. et al. The role of the lumbar facet joints in spinal stability. Spine 19:2667, 1994. 177. Hall H. The Canadian back education unit. Physiotherapy 66:4, 1980. 178. Hansson T.H., Keller T.S. and Punjabi M. A study of the compressive properties of lumbar vertebral trabecule: Effects of tissue characteristics. Spine 12:56–62, 1987. 179. Hart D.A. et al. Gender and neurogenic variables in tendon biology and repetitive motion disorders. Clin Othop 351:44, 1998. 180. Hausdorf J. M. et al. Fractal dynamics of human gait: Stability of long-range correlations in stride interval fluctuations. J. Appl Physiol 80:1448, 1996. 181. Hedtmann A. et al. Measurements of human spine ligaments during loaded and unloaded motion. Spine 14:175–185, 1989. 182. Helland M.M. Anatomy and function of the temporomandibular joint. J. Orthop Sports Phys Ther 1: 145–152, 1980. 183. Henneman E. et al. Functional significance of cell size in spinal motorneurons. I Neurophysiol 28:560–580, 1965. 184. Hersihler C. and Milner M. Angle-angle diagrams in the assessment of locomotion. Am J. Phys Med 59:3, 1980. 185. Herring S.A. and Nilson K.L. Introduction to overuse injuries. Clin Sports Med 6:225–239, 1987. 186. Hertling D. and Kessler R. M. Management of Common Musculoskeletal Disorders, ed 2. JB Lippincott, Philadelphia, 1990. 187. Hesse S. et al. Asymmetry of gait initiation in hemi-paretic stroke subjects. Arch Phys Med Rehabil 78:719, 1997. 188. Hettinga D.L. II Normal joint structures and their reaction to injury. J. Orthop Sports PhysTher 1:2, 1979. 189. Hettinga D. L. III: joinl structures and their reaction to injury. J. Orthop Sports Phys Ther I:3, 1980 190. Hill. A.V. First and Last Experiments in Muscle Mechanics. Cambridge: Cambridge University Press, 1970. 191. Hislop H. and Perrine J.J. The isokinetic exercise concept. Phys-Ther47:114–117. 1967. 192. Hogorvost T. and Brand R.A. Mechanoreceptors in joint function. J. Bone Jt Surg 80A:1365, 1998. 193. Hollinshead W.H. Functional Anatomy of the Limbs and Back, ed 4. WB Saunders, Philadelphia, 1976. 194. Horak F.B. et al. Postural perturbations: New insights for treatment of balance disorders. Phys Ther 77:517, 1997. 195. Horowils R. et al. A physiological role for titin and nebulin in skeletal muscle. Nature 323:160–164, 1986. 196. Howell I.N. et al. Motor unit activity during isometric and concentric-eccentric contractions of the human first dorsal interosseus muscle 1 Neurophysiol 74901-904, 1995. 197. Howell J.N., Chleboun G.S. and Conatser R.R. Muscle stiffness, strength loss, swelling and soreness following exercise-induced injury in humans I Physiol 464:183–196, 1993. 198. Huxley A.F. Muscle structure and theories of contractions. Prog Biophys Biophys Chem 7:225–318, 1957. 199. Huxley A.F. and Simmons. R.M. Proposed mechanism of force generation in striated muscle. Nature 233:533–538. 1971. 200. Hylander W.L. Functional Anatomy. In Sarnat. BG, and Laskins. DM (eds):TheTemporomandibularoint: A Biological Basis for Clinical Practice. WB Saunders, Philadelphia, 1992. 201. Inman V.T. et al. Human Walking. William & Wilkins, Baltimore, 1981. 202. Iverson B. et al. Balance performance, force production and activity levels in non-institutionalized men 60–90 years of age. Phys Ther 70:348–355, 1990. 203. Joosab M., Torode M. and Rao P.V. Preliminary findings on the effect of load-carrying on the structural integrity of the cervical spine. Surg Radiol Anat 16 393, 1994. 204. Kalin P. and Hirsch B. The origins and function of the interosseous muscles of the foot. J. Anat 152:83–91, 1987. 205. Kaplan E.B. Some aspects of functional anatomy of the human knee joint. Clin Orthop 23:18–29, 1962. 206. Kapandji I.A. The Physiology of the joints 3, ed 2 Churchill Livingstone, Edinburgh, 1974. 207. Kawakami Y. et al. Architectural and functional features of human triceps surae muscles during contraction. J. Appl Physiol 85:398–104, 1998. 208. Kapandji I.A. The Physiology of the Joints. Vol 2. ed. 2. Williams & Wilkins, Baltimore, 1970. 209. Kapandji I. The Physiology of the Joints, Vol. 2, ed. 5. Williams & Wilkins, Baltimore, 1987. 210. Keeple T.M. et al. Relative contributions of lower extremity joint moments to forward progression and support during gait. Gait Posture 6:1–8, 1997. 211. Keller T.S. et al. Regional variations in the compressive properties of lumbar vertebral trabeculae: Effects of disc degeneration. Spine 14:1012–1019, 1989. 212. Kennedy B. An Australian programme for management of back problems. Physiotherapy 66:4, 1980. 213. Kessler R.M. and Hertling D. Management of Common Musculoskeletal Disorders: Physical Therapy Principles and Methods, ed 3. Lippincott-Raven. Philadelphia, 1996. 214. Kent B.A. Anatomy of the trunk: A review Part I Phys Ther54:7, 1974. 215. Khoo B.C.C. et al. A comparison of lumbosacral loads during static and dynamic activities. Australas Phys EngSci Med 17:55, 1994. 216. Kjaersgaard-Anderson P. et al. Lateral talocalcaneal instability following section of the calcaneofibular ligament: A kinesiologic study. Foot Ankle 7:355–361, 1987. 217. Klein P. et al. Moment arm length variations of selected muscles acting on talocrural and subtalar joints during movement: an in vitro study. J. Biomech 29:21–30, 1996. 218. Klein J.A. and Hukins D.W. L.: Relocation of the bending axis during flexion-extension of lumbar intervertebral discs and its implications for prolapse. Spine 8:1776–1781, 1983. 219. Klein J.A. and Hukins D.W. L. Functional differentiation in the spinal column. Eng Med 12:83–85, 1983. 220. Kong W.Z. et al. Effects of muscle dysfunction on lumbar spine mechanics: A finite element study based on a two motion segment model. Spine 21:2197, 1996. 221. Knapik J.L. et al. Muscle groups through a range of joint motion. Phys-Ther 63:938–947, 1983. 222. Knapik J.L. and Ramos M.L. Isokinetic and isometric torque relationships in the human body. Arch Phys Med Rehabil 61:64. 1980. 223. Kraus S.L. Temporomandibular joint. In Saunders, HD (ed): Evaluation, Treatment, and Prevention of Musculoskeletal Disorders, ed 2. Viking Press. New York, 1985. 224. Kraus S.L. Temporomandibular joint. In Saunders. HD, and Saunders, R (eds): Evaluation, Treatment, and Prevention of Musculoskeletal Disorders, Vol. 1: Spine, ed. 3. Educational Opportunities, Bloomington, MN, 1993. 225. Kukulka C.G. and Clamann H.P. Comparison of the recruitment and discharge properties of motor units in human brachial biceps and adductor pollicis during isometric contractions. Brain Res 219:45–55, 1981. 226. Kumar S. Isometric and isokinetic back and arm lifting strengths: Device and measurement Biomech 21:35–44, 1988. 227. Kwan M.K. and WooSL-Y. Simultaneous measurements of strains on two surfaces of tendons and ligaments. J. Biomech 21:511, 1988. 228. Ladin Z. Kurukundi R.M. and DeLuca C.J. Mechanical recruitment of low-back muscles. Spine 14:927–938, 1989. 229. Lamb D.W. The neurology of spinal pain. Phys Ther 59:8, 1979. 230. Lamoreaux L.W. Kinematic measurements in the study of human walking. Bull Prosth Res, Spring 1971. 231. Lane L.B. and Bullough P.C. Age-related changes in the thickness of the calcified zone and the number of tidemarks in adult human articular cartilage. J. Bone joint Surg 62B:3, 1980. 232. Larson R.L. et al. Patellar compression syndrome: Surgical treatment by lateral retinacular release. Clin Orthop 134:158–167, 1970. 233. Larsson L.E. et al. the phases of stride and their interaction in human gait. Scand J. Rehabil Med 12:107, 1980. 234. Lehmkuhl D. and Smith L. Brunnstrom’s Clinical Kinesiology, ed 4. FA Davis, Philadelphia, 1984. 235. Lensen C.M. Biomechanics of the lumbar intervertebral disk: A review Phys Ther 60:4, 1980. 236. Lexell J. et al. Distribution of different fiber types in human skeletal muscle: Effects of aging studied in whole muscle cross sections. Muscle Nerve 6:588–595, 1983. 237. Lexell J. et al. What is the cause of the ageing atrophy? Total number, size and proportion of different fiber types studied in whole vastus lateralis muscle from 15- to 83-year old men. I Neurol Sci 84:275–294, 1988. 238. Lewis A.R. et al. Distribution of collagens and glycosaminoglycans in the joint capsule of the proximal interphalangeal joint of the human finger. Anat Rec 250:281, 1998. 239. Lohnson M.A., Pogar I., Weightman D. and Appleton D. Data on the distribution of fibre types in thirty-six human muscles: An autopsy study. I Neurol Sci 18:111, 1973. 240. Lieber R.L. et at. Architecture of selected muscles of the arm and forearm: Anatomy and implications for tendon transfer. J. Hand Surg 17:787798, 1992. 241. Lieber R.L. Skeletal Muscle Structure and Function: Implications for Rehabilitation and Sports Medicine. Williams & Wilkins. Baltimore, 1992. 242. Lieber R.L., Ljung B. and Friden J. Intraoperative sarcomere length measurements reveal differential design of human wrist extensor muscles. J. Exper Biol 200:19–25, 1997. 243. Lieber R.L. and Friden J. Muscle damage is not a function of muscle force but active muscle strain. J. Appl Physiol 74:520–526, 1993. 244. Lin R.M. et al. Lumbosacral kinematics in the sagittal plane: A radiographic study in vivo. JFormos Med Assoc 92:638, 1993. 245. Lindauer S.J. et al. Condylar movement and mandibular rotation during jaw opening. Am 1 Orthodon Dento-fac Orthop 107:573–577, 1995. 246. Lockwood A.H. Medical problems of performing artists. N Engl J. Med 320:221, 1989. 247. Loughner B.A. et al. The medical capsule of the human temporomandibular joint. I Oral Maxillofac Surg 55: 363–369, 1997. 248. Lu M.Y. and Hutton W.C. 3-D finite element model of L2-L3 disc body unit. Spine 21:2208, 1996. 249. Luger E. et al. Patterns of weight distribution under the metatarsal heads. J. Bone Joint Surg 8IB:199–202, 1999. 250. Lundberg A. Kinematics of the ankle/foot complex: Plantarflexion and dorsiflexion. Foot Ankle 9:194–200, 1989. 251. Lutz G.J. and Rome L.C. Built for jumping: The design of the frog muscular system. Science 263:370–372. 1994. 252. Maki B.E. and Mcllroy W.E. The role of limb movements in maintaining upright stance: The «change-in-support strategy». Phys Ther 77:489, 1997. 253. Macintosh I.E. and Bogduk N.: The morphology of the lumbar erector spine. Spine 12:658–668, 1987 254. Macintosh J.E., Bogduk N. and Pearcy M.I. The effects of flexion on the geometry and actions of the lumbar erector spine. Spine 18:884, 1993. 255. Macintosh I.E., Pearcy MJ. and Bogduk N. The axial torque of the lumbar back muscles and trunk. Australas N Z J. Surg 63:205, 1993. j 256. MacLaughlin S.M. and Oldale K. N. M. Vertebral body diameters and sex prediction. Ann Human Biol 19:285, 1992. 257. Maganaris C.N. et al. In vivo measurements of the triceps surae complex architecture in man; Implications for muscle function. J. Physiol 512:603–614, 1998. 258. Maiman DJ. and Pintar F.A. Anatomy and clinical biomechanics of the thoracic spine. Clin Neurosurg 38:296, 1992. 259. Mansour J.M. and Mow V.C. The permeability of articular cartilage under compressive strain and at high pressures. J. Bone joint Surg 58A:4, 1976. 260. Maroney S.P., Schultz A.B., MillerI A.A. and Andersson G.B.J. Load-displacement properties of lower cervical spine motion segments. I Biomech 21.769–779, 1988. 261. Marsolais E.B. and Edwards B.G. Energy costs of walking and standing with functional neuromuscular stimulation and long leg braces. Arch Phys Med Rehabil 69:243–249, 1988. 262. Matmiller A.W. The California back school. Physiotherapy 66:4, 1980. 263. Matsumoto M. et al. MRI of cervical intervertebral discs in asymptomatic subjects I Bone joint Surg 80-B: 19, 1998. 264. McDonough A.L. Effects of immobilization and exercise on articular cartilage — A review of literature. J. Orthop Sports Phys Ther 2:5, 1981. 265. McCorrnack B.M. et al. Anatomy of the thoracic pedicle. Neurosurgery 37.303, 1995. 266. McFadden K.D. and Taylor J.R. End-plate lesions of the lumbar spine. Spine 14:867–869, 1989. 267. McGill S.M. Low back exercises: Evidence for improving exercise regimens. Phys Ther 78:754, 1998. 268. McGill S.M. and Kippers V. Transfer of loads between lumbar tissues during flexion-relaxation phenomenon. Spine 19:2190, 1994. 269. McGill S.M. The biomechanics of low back injury: Implications on current practice industry and the clinic. J. Biomech 30:465, 1997. 270. Mierau D.R. et al. Sacroiliac joint dysfunction and low back pain in school aged children. J Manipulative Physiol Ther 7:81–84, 1994. 271. Milne N. The role of the zygapophyseal joint orientation and uncinate processes in controlling motion in the cervical spine. J. Anat 178:189, 1991. 272. Miller J.A.A., Schmatz C. and Schultz. A.B. Lumbar disc degeneration: Correlation with age, sex and spine level in 600 autopsy specimens. Spine 13:173–178, 1988. 273. Milner M. et al. Angle diagrams in the assessment of locomotor function. South Am Med J. 47:951, 1973. 274. Mitchell N. and Shepard N. Healing of articular cartilage in intra-articular fractures in rabbits. J. Bone joint Surg 62A:4, 1980. 275. Morris J. Biomechanics of the foot and ankle. Clin Orthop 122:10, 1977. 276. Murray M.P. Gait as a total pattern of movement. Am. J. Phys. Med 46:1, 1967. 277. Murray M.P. et al. Walking patterns of normal men. J. Bone Joint Surg. 46A:335, 1964. 278. Murphy A.J. and Wilson GJ. The assessment of human dynamic muscular function: A comparison of isoinertial and isokinetic tests. J. Sports Med Phys Fitness 36:169–177, 1996. 279. Murray G.M. et al. Electromyographic activity ot the human lateral pterygoid muscle during contralateral and protrusive jaw movements Arch Oral Biol 44 269–285, 1999. 280. Murray D.W. and Bulstrode C.J. The development of adolescent idiopathic scoliosis. Eur Spine 15:251, 1996. 281. MyklebustI.B. et al. Tensile strength of spinal ligaments. Spine 13.526531, 1988. 282. Nachemson A.L. The lumbar spine: An orthopedic challenge. Spine 1:1, 1976. 283. Nelson J.M, Walmsley R.P. O. and Stevenson I. M. Relative lumbar and pelvic motion during loaded spinal flexion/extension. Spine 20:199, 1995. 284. Nerlich A.G. Immunolocalization of major insterstitial collagen types in lumbar intervertebral discs of various ages. Virchows Arch 432:67, 1998. 285. Newell K.M. et al. Short-term non-stationarity and the development of postural control, Gait-Posture 6:56, 1997. 286. NgJK-F. et al. Relationship between muscle fiber composition and functional capacity of back muscles in healthy subjects and patients with back pain. J. Othop Sports Phys Ther 27:389, 1998. 287. Nicholas J.A. and Hershman E.B. The Lower Extremity and Spine in Sports Medicine. CV Mosby, St. Louis, 1986. 288. Nimni M.E. The molecular organization of collagen and its role in determining the biophysical properties of connective tissues. Biorheology 17:51, 1980. 289. Noyes F.R., DeLucas J.L. and Torvik P. Biomechanics of anterior cruciate ligament failure: An analysis of strain-rate sensitivity and mechanisms of failure in primates. J. Bone joint Surg 56A:2, 1974. 290. Nordin M. and Frankel V.H. Basic Biomechanics of the Musculoskeletal System, ed 2 Lea & Febiger, Philadelphia, 1989. 291. Nolan I.P. and Sherk H.H. Biomechanical evaluation of the extensor musculature of the cervical spine. Spine 13:9-11, 1988. 292. Nordin M. and Frankel V.H. Basic Biomechanics of the Skeletal System, ed. 2. Lea & Febiger, Philadelphia, 1989. 293. Nuber G. Biomechanics of the foot and ankle during gait. Clin Sports Med 7:1-12, 1988. 294. Oatis C.A. The use of a mechanical model to describe the stiffness and damping characteristics of the knee joint in healthy adults. Phys Ther 73:740–749, 1993. 295. Oda I. et al. Biomechanical role of the posterior elements, costovertebral joints, ribcage in the stability of the thoracic spine. Spine 21:1423, 1996. 296. O’Dwyer J. College Physics, ed 2, Wadsworth, Belmont, CA, 1984. 297. Onley S.J. et al. Work and power in hemiplegic cerebral palsy gait. Phys Ther 70:431–438, 1990. 298. Olszewski A.D., Yaszemski MJ. and White A. The anatomy of the human lumbar ligamentum flavum. Spine 21:2307, 1996. 299. O’Sullivan S.B. Motor control assessment. In O’Sulli-van S. and Schmitz T (eds): Physical Rehabilitation: Assessment and Treatment, ed. 3. F. A. Davis, Philadelphia,1994. 300. Pal G.P. and Routal R.V. The role of the vertebral laminae in the stability of the cervical spine. J. Anat 188:485, 1996. 301. Pal G.P. and Sherk H.H. The vertical stability of the cervical spine. 13:447–449, 1988. 302. Palastanga N., Field D. and Soames R. Anatomy and Human Movement: Structure and Function, Heinemann Medical Books, Halley Court, Jordan Hill, Oxford, 1989. 303. Panjabi M.M. et al. Complexity of the thoracic spine pedicle anatomy. Eur Spine I 6:19, 1997. 304. Panjabi M.M. et al. Thoracic human vertebrae Quantitative three-dimensional anatomy Spine 16:888, 1991. 305. Panjabi M. et al. Intrinsic disk pressure as a measure of integrity of the lumbar spine. Spine 13:913–917, 1988. 306. Panjabi M.M. et al. Mechanical behavior of the human lumbar and lumbosacral spine as shown by three-dimensional load-displacement curves. J. Bone Joint Surg 76-A:4l3, 1994. 307. Panjabi M. et al. Spinal stability and intersegmental muscle forces: A biomechanical model. Spine 14:194–199, 1989. 308. Panjabi M. Symposium on the lumbar spine II. Orthop Clin North Am 8:169–179, 1977. 309. Panjabi M., Yamamoto I., Oxland T. and Crisco J. How does posture affect coupling in the lumbar spine? Spine 14:1002–1011, 1989. 310. Panjabi M.M. et al. Cervical human vetebrae: Qualitative three dimensional anatomy of the middle and lower regions Spine 16:86, 1991. 311. Panjabi M.M. et al. Articular facets of the human spine. Spine 18 1298, 1993. 312. Panjabi M.M., Oxland T.R. and Parks H. Quantitative anatomy of the cervical spine ligaments. I Spinal Disord 4:270, 1991. 313. Panjabi M. et al. Three dimensional movements of the upper cervical spine. Spine 13:726–730, 1988. 314. Pandy M.G. and Berne N. Quantitative assessment of gait determinants during single stance via a three-dimensional model. Part 1: Normal gait. J. Biomech 22:717, 1989. 315. Parnianpour M., Nordin M., Kahanovitz N. and Frankel V. The triaxial coupling of torque generation of trunk muscles during isometric exertions and the effect of fatiguing isoinertial moments on the motor output and movement patterns. Spine 13:982–990, 1988. 316. Parnianpour M, Nordin M., Frankel V.H. and Kahanovitz N. The effect of fatigue on the motor output and pattern of isodynamic trunk movement. Isotechnol Res Abstr, April 1988. 317. Patel TJ. and Lieber R.L. Force transmission in skeletal muscle: From actomyosin to external tendons. Exerc Sport Sci Reviews 25:321–363, 1997. 318. Paulos L. et al. Patellar malalignment, a treatment rationale. Phys Ther 60:1624–1632, 1980. 319. Peachey L.D. and Franzini-Armslrong C. Structure and function of membrane systems of skeletal muscle cells. In Peachey. LD (ed): Handbook of Physiology. Bethesda, MD: American Physiological Society. 23–73.,1983. 320. Perrine I.J. and Edgerton. V.R. Muscle force-velocity and power-velocity relationships under isokinetic loading. Med Sci Sports 10:159–166, 1978. 321. Perry J. Contractures: A historical perspective. Clin Orthop Rel Res 219:8, 1987. 322. Perry J. Anatomy and biomechanics of the hind foot. Clin Orthop 177:7 15, 1983. 323. Petersen W. and Tillman B. Structure and vascularization of the knee joint menisci (abstract). Z Othop Ihre Grenzgeb 137:31, 1999. 324. Pintar F.A. et al. Biomechanical properties of human lumbar spine ligaments. J. Biomech 25:1351, 1992 325. Platts R.G.S. Spinal mechanics. Physiotherapy 63:7, 1977. 326. Pope M. and Panjabi M. Biomechanical definitions of spinal Stability. Spine 10:255–256, 1985. 327. Postacchini F. et al. Ligamentum flava in lumbar disc hernation and spinal stenosis. Spine 19:917, 1994. 328. Potvin J.R., McGill. S.M. and Norman R.W. Trunk muscle and lumbar ligament contributions to dynamic lifts with varying degrees of trunk flexion. Spine 16:1099, 1991. 329. Purslow P.P. Strain-induced reorientation of an intramuscular connective tissue network: Implications for passive muscle elasticity. J. Biomech 22:21–31, 1989. 330. Putz R. The detailed functional anatomy of the ligaments of the vertebral column. Ann Anat 174:40, 1992. 331. Professional Staff Association. Rancho Los Amigos Medical Center: Observation Gait Analysis Handbook. Downey, Calif., 1989. 332. Radin E.L. and PaulI.L. A consolidated concept of joint lubrication. J. Bone joint Surg 54A:607. 333. Radin E.L. et al. Role of the menisci in distribution of stress in the knee. Clin Orthop 185:290–293, 1984. 334. Ralphs J.R. and Benjamin M. The joint capsule: Structure, composition, ageing and disease. J. Anat 184:503, 1994. 335. Rasmussen O. et al. Distal tibiofibular ligaments. Acta Orthop Scand 53:681–686, 1982. 336. Rasmussen O. and Kromann-Andersen C. Experimental ankle injuries. Acta Orthop Scand 54:356–362, 1983. 337. Rasmussen O. and Touberg-Jensen L. Mobility of the ankle joint: recording of rotatory movements in the talocrural joint in vitro with and without the lateral collateral ligaments of the ankle. Acta Orthop Scand 53:155–160, 1982. 338. Rasmussen O. et al. An analysis of the function of the posterior talofibular ligament hit Orthop (SICOT) 7:41–48, 1983. 339. Reilly J.P. et al. Disorders of the sacroiliac joint in children. J. Bone joint Surg I:40, 1988. 340. Reilly D.T. Dynamic loading of normal joints. Rheum Dis Clin North Am 14:497–502, 1988. 341. Roach J.W. Adolescent Idiopathic Scoliosis. Othop Clin North Am 30:353, 1999. 342. Roberts S., Menage L. and Urban I. P. C. Biochemical and structural properties of the cartilage end-plate and its relation to the intervertebral disc. Spine 14: 166–173, 1989. 343. Rocabado M. Course notes, 1988. 344. Rodeo S.A. et al. Analysis of collagen and elastic fibers in shoulder capsule in patients with shoulder instability. Am J. Sports Med 26:634, 1998. 345. Rong G. and Wang Y. The role of the cruciates ligaments in maintaining knee joint stability. Clin Orthop Rel Res 215:65, 1987. 346. Rosse C. and Clawson D.K. The Musculoskeletal System in Health and Disease. Harper & Row. Hagerstown, MD, 1980. 347. Rosse D. and Clawson D.E. The leg, ankle and foot. In The Musculoskeletal System in Health and Disease. Harper & Row, Hagerstown, Md., 1980. 348. Roy S.H. et al. Classification of back muscle impairment based upon the surface electromyographic signal.) Rehabil Res Dev 34:405, 1997. 349. Rucco V., Basadonna P.T. and Casparini D. Anatomy of the iliolumbar ligament: A review of its anatomy and a magnetic resonance study Am I Phys Med Rehabil 75:451, 1996. 350. Sacks R.D. and Roy R.R. Architecture of the hind limb muscle of cats: Functional significance. J. Morphol 173:185–195, 1982. 351. Salsabili N., Valojerdy M.R., and Hogg D. A. Variations in thickness of articular cartilage in the human sacroiliac joint. Clin Anat 8:388, 1995. 352. Saltin B. el al: Fiber types and metabolic potentials of skeletal muscles in sedentary man and endurance runners. Ann N Y Acad Sci 301:3-29, 1977. 353. Sanner W. et al. A study of ankle joint height changes with subtalar joint motion. J. Am PodiatrSoc 71:156–161, 1981. 354. Sarrafian S. Biomechanics of the subtalar joint. Clin Orthop 290:17–26, 1993. 355. Schenck J.M. and Cordova F.K. Introductory Biomechanics, ed. 2. F. A. Davis, Philadelphia, 1980. 356. SeebacherJ.R. et al. Structure of the posterolateral aspect of the knee. J. Bone Joint Surg (Am) 64:536–540, 1982. 357. Seedhom B.B. Loadbearing function of the menisci. Physiotherapy 62:7, 1978. 358. Sekiya N. et al. Optimal walking in terms of variability in step length. Phys Ther 26:266, 1997. 359. Sergio L.E. and Ostry D.J. Coordination of mono- and bi-articular muscles in multi-degree of freedom elbow movements. Exp Brain Res 97:551–555, 1994. 360. Siegler S. et al. The three dimensional kinematics and flexibility characteristics of the human ankle and sutalar joints — part I. Biomech Eng 110 364–373, 1988. 361. Shea M. et al. Variations in stiffness and strength along the cervical spine. J. Biomech 24:95, 1991. 362. Shirazi-Adl A. Strain in fibers of a lumbar disc. Spine 14:98-103, 1989. 363. Simkin P.A. In Schumacher H. R. Klippel J. H. and Robinson D. R. (eds): Primer on the Rheumatic Diseases, ed9. Arthritis Foundation, Atlanta, 1988. 364. Singh M. and Karpovich P.V. Isotonic and isometric forces of forearm flexors and extensors. Appl Physiol 21:1435–1437, 1966. 365. Sicher H. Functional anatomy of the temporomandibular joint. In Sarnat. BG (ed): The Temporomandibular Joint, ed 2. Charles С Thomas, Springfield, IL, 1964. 366. Soderberg G.L. and Cavel R.H. A light emitting diode system for the analysis of gait. Phys Ther 58:4, 1978. 367. Smidt G. Methods of studying gait. Phys Ther 54:1, 1974. 368. Sonstegard D.A. et al. The surgical replacement of the human knee joint. Sci Am 238(1):44–51, 1978. 369. Speers R.A. et al. Multivariate changes in coordination of postural control following spaceflight. J. Biomech 31:883, 1998. 370. Spencer J., Hayes К.С. and Alexander I.J. Knee joint effusion and quadriceps reflex inhibition in man. Arch Phys Med Rehabil 65:171–177, 1984. 371. Staron. R.S. Human skeletal muscle fiber types; Delini-ation. development, and distribution Can I Appl Physiol 22:307–327, 1997. 372. Staron R.S. et al. Strength and skeletal muscle adaptations in heavy-resistance-trained women after detraining and retraining I Appl Physiol 70:631–640, 1991. 373. Stauber W.T. Eccentric action muscles, physiology, injury and adaptation. Exerc Sport Sci Rev 17 157–185, 1989. 374. Steindler A. Kinesiology. Charles C. Thomas. Springfield, III, 1995. 375. Stephens M. and Sammarco G. The stabilizing role of the lateral ligament complex around the ankle and subtalar joints. Foot Ankle 13:130–136, 1992. 376. Stokes M. and Young A. The contribution of reflex inhibition to arthogenous muscle weakness Clin Sci 67:7-14, 1984. 377. Studenski S. et al. The role of instability in falls among older persons. Proceedings of the APTA Forum. APTA, Alexandria, Va., 1990. 378. Sullivan M.S. Back support mechanisms during manual lifting. Phys Ther 69:52–59, 1989. 379. Tabary J.C. et al. Physiological and structural changes in the cats soleus muscle due to immobilization at different lengths by plaster casts. J. Physiol 224 231–244, 1987. 380. Takebe K. et al. Role of the fibula in weight-bearing. Clin Orthop 184:2899–2892,1984. 381. Taunton J.E. et al. Non-surgical management of overuse knee injuries in runners. Can J. Sports Sci 12:11–18, 1987. 382. Teramoto S. et al. Influence of kyphosis on the age-related decline in pulmonary function. Adstract Nippon Ronen Igakkai Zasshi 35:23, 1998. 383. Terry G.C. et al. Anatomy of the iliopatellar band and iliotibial tract. Am J. Sports Med 14-39-45, 1986. 384. Tillman L.I. and Cummings G.S. Biologic Mechanisms of Connective Tissue Mutability. In Currier D. P. and Nelson R.M. (eds): Dynamics of Human Biologic Tissues. FA Davis, Philadelphia, 1992. 385. Troup J.D.G. Biomechanics of the vertebral column. Physiotherapy 65:8, 1979. 386. Torzilli P.A. et al. An in vivo biomechanical evaluation of anterior-posterior motion of the knee. J. Bone Joint Surg 63A:960–968, 1981. 387. Twomey L.T. and Furniss B.I. The life cycle of the intervertebral disc: A review. Aust J. Physiol 24:4, 1978. 388. Twomey L.T. and Taylor J.R. Sagittal movements of the human vertebral column. Aqualitative study of the role of the posterior vertebral elements. Arch Phys Med Rehabil 64:322–324, 1983 389. Twomey L. and Taylor I. Flexion creep deformation and hysteresis in the lumbar vertebral column. Spine 7:116, 122, 1982. 390. Twomey L.T., TaylorJ.R. and Oliver M.J. Sustained flexion loading, rapid extension loading of the lumbar spine, and the physical therapy of related injuries. Physiother Pract 4:129–138, 1988. 391. Urban J.P.G. and McMullin I.F. Swelling pressure of the lumbar intervertebral discs: Influence of age spinal level, composition and degeneration. Spine I3: 179–186, 1988. 392. Van Groeningen C.JJ. E. and Erkelens C. J. Task-dependent differences between mono- and bi-articular heads of the triceps brachii muscle. Exp Brain Res 100.345–352, 1994. 393. Van Ingen Schenau. G.J. et al. The control of monoarticular muscles in multijoint leg extensions in man I Physiol 484:247–254, 1995. 394. Van Osch, GJVM et al. Relation of ligament damage with site specific cartilage loss and osteophyte formation in collaginase induced osteoarthritis in mice. J. Rheum 23:1227, 1996. 395. Van Zuylen E.l., Gielen AM. and Van Der Gon. JJ.D. Coordination and inhomogenous activation of human arm muscles during isometric torques. I Neurophys 60:1523–1548, 1988. 396. Vleeming A. et al. The function of the long dorsal sacroiliac ligament. Spine 21:556, 1996. 397. Vrahas M. et al. Ligamentous contributions to pelvic stability. Orthopedics 18:271, 1995. 398. Vleeming A. et al. Relation between form and function in the sacroiliac joint. Part 1: Clinical anatomical aspects. Spine 15:130, 1990. 399. Vleeming A. Relation between form and function in the sacroiliac joint Part 2 Biomechanical aspect Spine 15:11, 1990. 400. Walker J. M. Cartilage of Human joints and Related Structures. In Zachazewski J. E. Magee DJ. and Quillen W.S. (eds): Athletic Injuries and Rehabilitation. WB Saunders. Philadelphia, 1996. 401. Walker J.M. Pathomechanics and classification of cartilage lesions, facilitation of repair. J. Orthop Sports Phys Ther 28:216, 1998. 402. Walker J.M. The sacroiliac joint: A critical review. Phys Ther 72:903, 1992. 403. Wang K. et al. Viscoelasticity of the sarcomere matrix of skeletal muscles: The tilin-myosin composite filament is a dual-stage molecular spring. Biophys) 64:1161–1177, 1993. 404. Waltimo A. and Kononen M. A novel bite force recorder and maximal isometric bite force values for healthe young adults. Scand J. Dent Res 101:171–175, 1993. 405. Warren C.L. et al. Mechanical factors in the initiation of eccentric contraction-induced injury in rat soleus muscle. Physiol 464:457–475, 1993. 406. Waters R.W.L. et al. Comparable energy expenditure after arthrodesis of the hip and ankle. J. Bone Joint Surg 70A: 1032–1037, 1988. 407. Wells R.P. The kinematics and energy variations of swing-through crutch gait. J. Biomech 12:579, 1979. 408. Wernick J., Volpe R.G. Lower extremity function. In Valmassy R. I. (ed): Clinical Biomechanics of the Lower Extremities. CV Mosby, St. Louis, 1996. 409. Wickiewicz T.L. et al. Muscle architecture of the human lower limb. Clin Orthop Rel Res 179–275, 283, 1983. 410. Widmann F.K. Pathobiology: How Disease Happens. Little, Brown, Boston, 1978. 411. Wilke H.J. et al. Stability increase of the lumbar spine with different muscle groups: A biomechanical in vitro study. Spine 20:192, 1995. 412. Wills et al. Effects of immobilization on human skeletal muscle. Orthop RevXl(l l):57–64, 1982. 413. Williams P.L. et al (eds): Gray’s Anatomy, ed 38. Churchill Livingstone, New York, 1995. 414. Williams P.E. and Goldspink G. Changes in sarcomere length and physiological properties in immobilized muscle, J. Anat 127:459–468, 1978. 415. Williams P.E. and Goldspink G. Connective tissue changes in immobilized muscle. J. Anat 138-343-350, 1984. 416. Williams P.E. Use of intermittent stretch in the prevention of serial sarcomere loss in immobilized muscle. Ann Rheum Dis 49:316–317, 1990. 417. Williams P.L., Warwick. R., Dyson. M. and Bannister L.H. (eds): Gray’s Anatomy, ed 37 Churchill Livingstone. London, 1989. 418. Williams P.L. (ed.) Gray’s Anatomy, ed 35. Churchill Livingstone. New York, 1995. 419. Williams P.L. et al (eds): Gray’s Anatomy, ed 38. Churchill Livingstone, New York, 1995. 420. Williams P.L. and Warwick R. (eds): Cray’s Anatomy, ed. 38. W. B. Saunders, Philadelphia, 1995. 421. Winegard K.J. et al. An evaluation of the length-tension relationship in elderly human plantarflexor muscles. J. Gerontol 52A:B337-343, 1997. 422. Witzman F.A. Soleus muscle atrophy induced by cast immobilization: Lack of effect by anabolic steroids Arch Phys Med Rehabil 69:81–85, 1988. 423. Winter D.A. Biomechanics of below knee amputee gait. J. Biomech 21:361–367, 1988. 424. Winter D.A. Energy assessments in pathological gait. Physiother (Canada) 30, 1978. 425. Winter D.A. Analysis of instantaneous energy of normal gait. J. Biomech 9:253, 1976. 426. Winter D.A. Biomechanics of normal and pathological gait: Implications for understanding human locomotor control. 1 Motor Behav 21:337–355, 1989. 427. White A.A. and Panjabi M.M. Clinical Biomechanics of the Spine, ed 2. JB Lippincott, Philadelphia, 1990. 428. Woo SL-Y. et al. Mechanical properties of tendons and ligaments. Biorheology 19:397, 1982. 429. Wolf A.W. et al. Current concepts in synovial fluid analysis. Clin Orthop 134:261, 1978. 430. Woollacott M. Postural control mechanisms in the young and old. Proceedings of the APTA Forum, APTA, Alexandria. Va., 1990. 431. Wu I.S.S. and Chen J. H. Clarification of the mechanical behavior of spinal motion segments through a threedimensional poroelaslic mixed finite element model. Med Eng Phys 18:215, 1996. 432. Young A., Stokes M., Lles J.F. and Phil D. Effects of joint pathology on muscle. Clin Orthop Rel Res 219:21–26, 1987. * * * Нейматов Эдуард Металович Сабинин Сергей Львович НАСТОЛЬНАЯ КНИГА ОСТЕОПАТА ОСНОВЫ БИОМЕХАНИКИ ДВИЖЕНИЯ ТЕЛАСанитарно-эпидемиологическое заключение 77.99.60.953.Д. 008014.07.09 от 08.07.2009 г. Подписано в печать 03.11.2011. Формат 60x90/16. Бумага офсетная. Печать офсетная. Гарнитура PetersburgC. Объем 30 печ. л. Тираж 1500 экз. Заказ № ООО «Медицинское информационное агентство» 119048, Москва, ул. Усачева, д. 62, стр. 1, оф. 6 Тел./факс: (499) 245-45-55 E-mail: miapubl@mail.ru; http://www.medagency.ru Интернет-магазин: www.medkniga.ru Книга почтой на Украине: а/я 4539, г. Винница, 21037 E-mail: maxbooks@svitonline.com Телефоны: +380688347389, 8 (0432) 660510 Отпечатано в в полном соответствии с качеством предоставленного электронного оригинал-макета в типографии филиала ОАО «ТАТМЕДИА» «ПИК «Идел-Пресс». 420066, г. Казань, ул. Декабристов, 2.
Последние комментарии
7 часов 55 минут назад
10 часов 12 минут назад
1 день 54 минут назад
1 день 55 минут назад
1 день 6 часов назад
1 день 9 часов назад